超机动非线性自抗扰反演控制律设计
2015-09-03 01:53杨婷婷李爱军
哈尔滨工业大学学报 2015年9期
杨婷婷,李爱军,孙 逊
(西北工业大学 自动化学院,710072西安)
超机动又称过失速机动,是新一代高性能战机不可缺少的重要性标志之一.具有超机动能力的战机能够实现大迎角内的稳定控制,并且依靠绕速度矢量滚转控制,获得快速机头转向或瞄准能力,从而有效规避敌机进攻并可占据有利攻击位置,形成战术优势[1-2].超机动能力的获得并不简单,这是因为在大迎角飞行区域飞机本体对象体现出强非线性特性、非定常特性、偏离特性与机翼摇滚特性,此外不对称的力与力矩作用、气动舵面舵效的迅速下降或消失[3],这些都使得采用经典线性控制方法进行大迎角条件下的超机动解耦与补偿控制变得异常困难,并且很难获得最优的控制性能[4-5].
采用非线性控制方法是解决超机动控制难题的有效途径.非线性动态逆是超机动最常使用的控制方法,但由于存在的逆误差需要神经网络等进行在线补偿,往往使得控制结构复杂.Backstepping控制方法也称反演控制[6-8],反演控制方法的设计思想是通过不超过系统阶数的子系统表示复杂的非线性系统,随后设计适合每个子系统的Lyapunov函数和中间虚拟控制量,反演推导到整个非线性系统,最后集合成为完整的控制律,适合于超机动控制律设计.
自抗扰控制方法是一种全新的控制技术,由中国科学院韩京清研究员提出并发展而来[9].在进行自抗扰控制器设计时,可以把系统模型的各种不确定性归结为扰动并利用扩张状态观测器进行估计与补偿,从而控制系统的鲁棒性得到了增强并对具有高度非线性与强扰动的系统都能保证较高的控制精度[10-13].本文使用反演方法设计了超机动非线性控制律,但该方法在存在较大建模误差时,控制性能会出现下降趋势,体现出驾驶员不期望的操纵特性,而对于风洞吹风数据,一般会存在30%的建模误差.针对这一问题,利用自抗扰控制中的扩张状态观测器对建模误差进行实时估计与补偿,提出了一种自抗扰反演非线性控制方法.
1 飞机大迎角六自由度非线性建模
具有大迎角气动特性的高逼真度飞机模型对于超机动控制律的设计是至关重要的,这是因为,只有针对正确的大迎角气动特性进行控制律设计,才能够实现大迎角状态的稳定控制,避免大迎角偏离、失速尾旋等情况的发生.飞机大迎角六自由度模型为

其中:V为空速,m为飞机质量,P为推力,Q为阻力,Y为升力,Z为侧力,α为攻角,β为侧滑角,ϑ为俯仰角,γ为滚转角,φ为偏航角,ωx为滚转角速度,ωy为偏航角速度,ωz为俯仰角速度,Mx为滚转力矩,My为偏航力矩,Mz为俯仰力矩,h为飞行高度,z为侧向偏离,L为飞行距离,Jx为飞机绕x轴惯矩,Jy为飞机绕y轴惯矩,Jz为飞机绕z轴惯矩,Jxy为飞机绕xy平面惯性积.
飞机大迎角为-30°~90°.气动导数会随着飞行高度、马赫数、迎角、迎角变化率、推力矢量偏转、平尾、副翼、方向舵变化而呈现强烈非线性变化特性.对于所建立起来的飞机大迎角六自由度非线性模型,在仿真过程中计算的每一步,都必须对随飞行状态变化的各系数重新计算一遍.因此飞机的大迎角六自由度非线性仿真模型是极其复杂的.
推力矢量发动机在纵、横与航向上产生的推力分量为
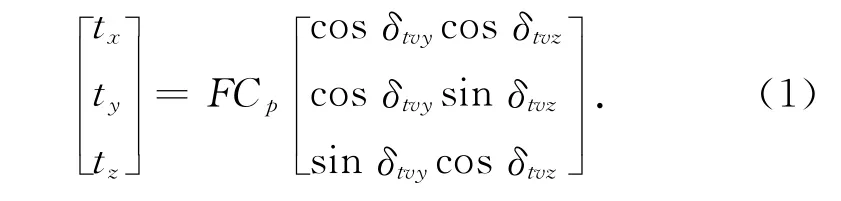
其中:δtvy为推力矢量的横向偏转角度,δtvz为推力矢量的纵向偏转角度,F为单个发动机的静推力,Cp为单个发动机的推力系数.
左、右发动机在纵、横与航向上产生的力矩和为

2 反演超机动飞行控制
根据飞机大迎角六自由度模型以及时标分离方法,可将飞机方程写为
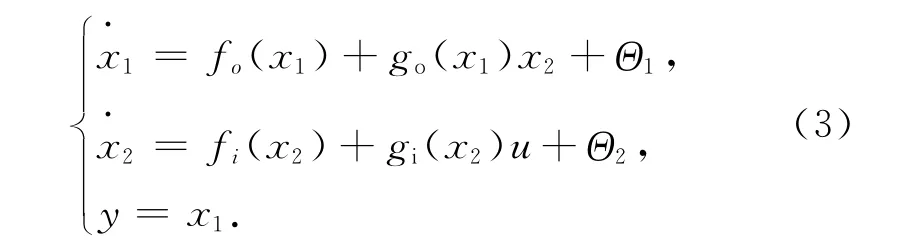
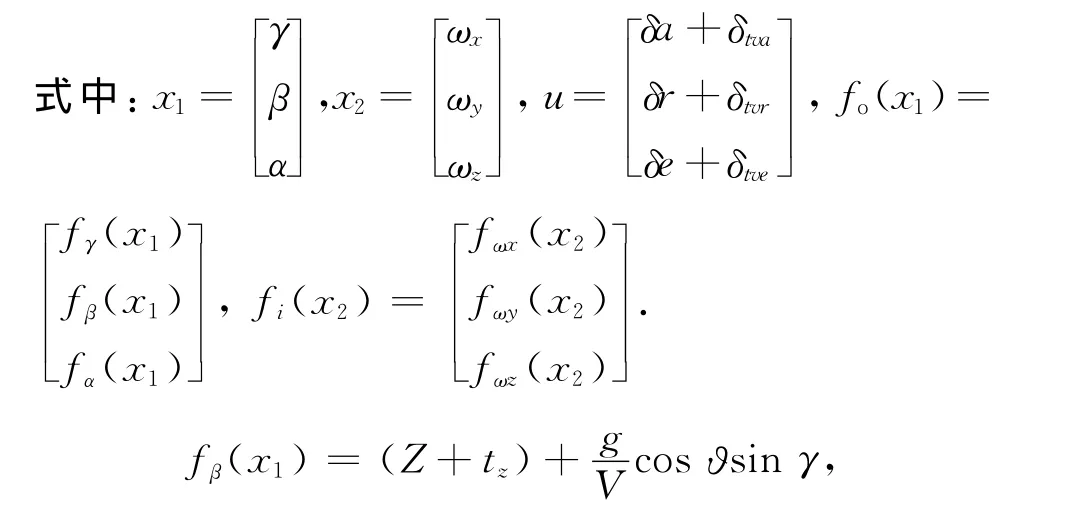

式中:δa为副翼,δr为方向舵,δe为平尾,δtva为推力矢量差动偏转,δtvr为推力矢量横向偏转,δtve为推力矢量俯仰偏转,Θ1、Θ2为模型不确定性.
定义虚拟反馈误差变量

其中:x1q为系统期望输出轨迹yd,x2q为系统虚拟控制量.
对z1求导,有

通过CMAC[5]神经网络逼近被控系统的不确定性Θ1,得

其中:N1为期望权值向量,ε1为逼近误差,为估计的权值向量,为期望与估计权值向量的误差.
定义虚拟控制量x2q为



定义实际输入量与期望输入量之差为z3,z3=u-uq,其中u为实际控制输入舵面偏转量,uq为期望控制输入舵面偏转量.
对式(4)中的z2求导,得

设计CMAC神经网络逼近系统的不确定性,选取虚拟控制量uq为


进而可得

选取低通滤波器

其中:u为实际控制输入,ul为滤波器输入.对控制输入舵面误差量z3,求导得

设计CMAC神经网络逼近系统的不确定性Θ3,选取低通滤波器输入uf为

同理可推导出

用估计权值代替期望权值,得


当选择Ωj> ‖εj‖ 时,存在<0.故控制系统的实际输出量渐近跟踪期望输出.
3 自抗扰扩张状态观测器设计
扩张状态观测器是自抗扰控制器的核心环节,它的性能直接关系到自抗扰控制器的稳定性和收敛性.通过扩张状态观测器不仅可以得到各个状态变量的估计而且能够估计出系统模型中的内扰和外扰的实时作用量,以使对象的不确定性在反馈中加以补偿.
非线性不确定对象受未知外界扰动作用的表达式为

记a(t)=,将a(t)扩张到系统的状态变量中,得到被扩张的状态变量

可将非线性不确定对象的表达式改写为

从而构造扩张状态观测器为

观测器参数βi>0,使以x(t)为输入的系统各状态分别跟踪被扩张的状态变量,即

可以看出,该观测器不但能够给出状态变量的估计,还能够给出系统运行时的实时值a(t)的估计,因此该扩张状态观测器是一个独立于系统模型的观测器.
对于三阶扩张状态观测器,取fc1(e1)=e1,并令


其中:g1(e1)、g2(e1,e2)为 任 意 连 续 正 定 函 数,g1(0)=0,g2(0,0)=0,k1、k2、k3为常数.
如果系统(12)的参数β满足不等式
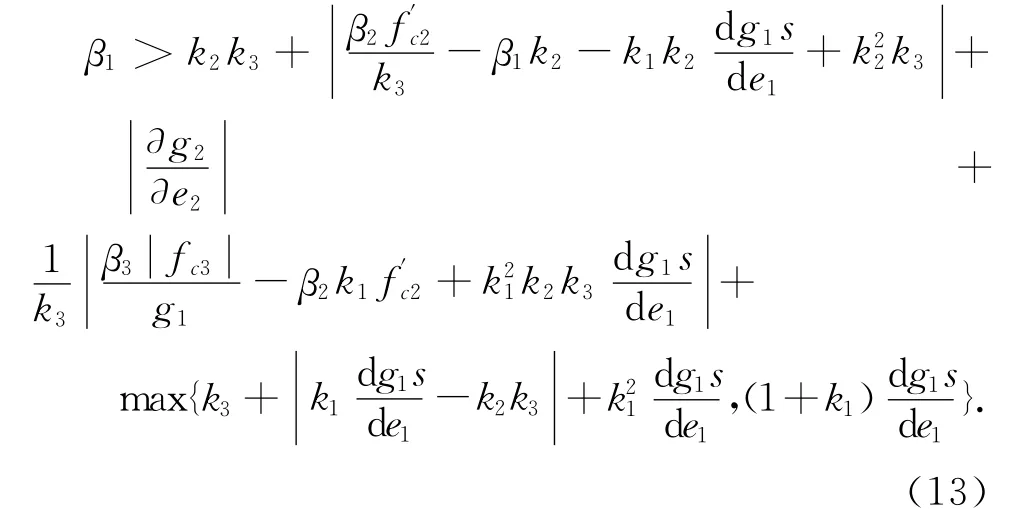
则系统(13)的所有轨线将收敛到原点.采用扩张状态观测器对迎角控制回路进行建模不确定性实时估计与补偿,扩张状态观测器的离散化形式为
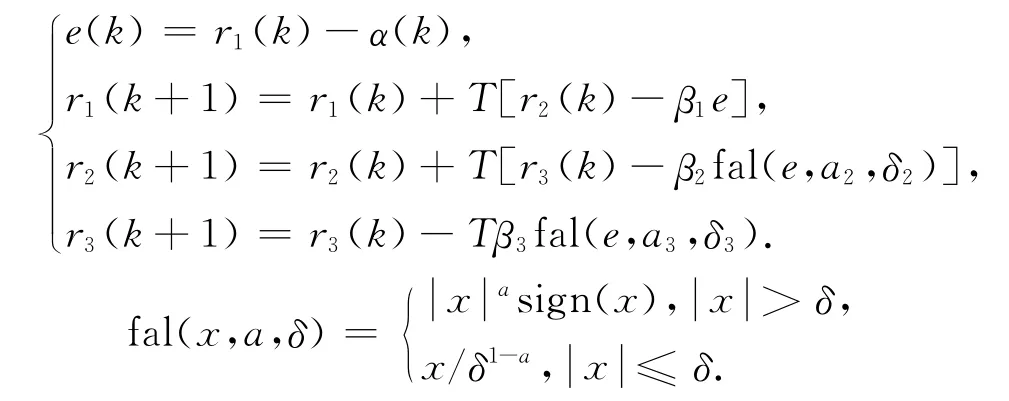
基于扩张状态观测器的自抗扰控制补偿量为uESO=-r3/b,总的控制输入为反演控制输入与自抗扰补偿控制量之和.
4 仿真验证
使用反演控制方法进行大迎角超机动飞行控制,利用扩张状态观测器进行建模不确定性补偿.反演控制器参数:v1=11.6,v2=8.9,v3=6,τ=0.003,Ω1=0.001,Ω2=0.1,Ω3=1 000.CMAC神经网络参数:η=0.3,泛化参数C=100,量化等级为10 000.扩张状态观测器参数:β1=150,β2=400,β3=60,a2=0.4,a3=0.1,δ2=0.01,δ3=0.01.
舵机模型为10/(s+10),舵面偏转极限为±20°,采用轴对称推力矢量,偏转角为20°,方位角为0°~360°.
图1给出了超机动大迎角眼镜蛇机动飞行仿真曲线.飞机保持速度97m/s,迎角11°的平飞状态,拉动驾驶杆,使飞机迎角快速达到89°并保持,随后向前推驾驶杆,使迎角逐渐恢复到配平迎角,飞机重新保持平飞状态.从飞行仿真曲线可以看出,大迎角响应迅速并能够稳定保持,仅用时3.3s,迎角即达到89°,推力矢量正常偏转,法向过载最大为2.9g,高度变化仅为70m,在纵向操纵的过程中,横航向保持稳定,侧滑角最大仅变化0.06°,眼镜蛇机动控制效果优异.
对飞机模型中的部分气动参数施加40%的摄动,并进行60°迎角保持机动仿真验证,自平飞状态迅速拉杆,使飞机建立并保持60°迎角飞行状态.图2给出了机动响应对比曲线,其中虚线代表单纯的反演控制方法,实线代表自抗扰反演控制方法.从对比曲线可以看出,存在建模误差的情况下,采用自抗扰反演方法的飞行控制器,其迎角响应仍然稳定、平滑,超调仅为1%,达到了驾驶员期望的操纵响应特性.与之相比,仅仅采用反演控制方法,其迎角响应存在8.5%的超调,并且需经轻微振荡后才可稳定,稳定后存在6%的稳态误差.

图1 眼镜蛇机动仿真曲线
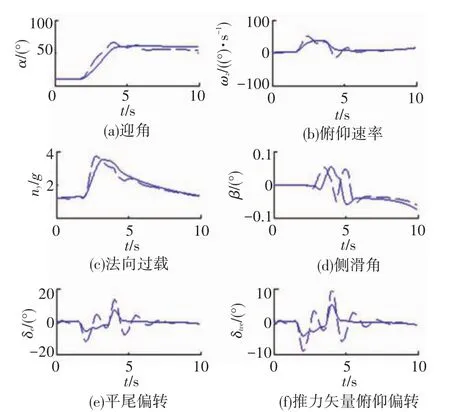
图2 60°迎角保持机动仿真对比曲线
5 结 论
1)基于自抗扰反演的非线性控制方法能够实现大迎角超机动飞行控制,由于其直接基于非线性模型开展设计,能够明显提升设计效率.
2)对于建模误差的影响,由于扩张状态观测器能够进行实时估计与补偿,因此明显提升了建模不确定条件下的控制效果.
3)该方法不但可以应用于超机动飞行控制,而且也可以用于其它飞行控制任务.
[1]朱铁夫,李明,邓建华.基于Backstepping控制理论的非线性飞控系统和超机动研究[J].航空学报,2005,26(4):430-433.
[2]熊治国,孙秀霞,胡孟权.自抗扰控制器在超机动飞行快回路控制中的应用[J].控制与决策,2006,21(4):477-480.
[3]CHARLES A,MARK C,MICHAEL F.The X-31 experience:aerodynamic impediments to post-stall agility[R].Washington DC:AIAA,1995.
[4]万晖.自抗扰控制器的稳定性分析及其应用[D].北京:中国科学院,2001.
[5]ALBUS S.A new approach to manipulator control:the cerebellar model articulation controller(CMAC)[J].Trans,ASME,J Dyn Syst Meas Control,1975,97(3):220-227.
[6]WARREN D,BRENDAN B,JESS C.An adaptive backstepping controller for a hypersonic air-breathing missile[R].Washington DC:AIAA,1995.
[7]EDOUARD R, MOMHAMED B, ADRIEN D.Nonlinear backstepping based trajectory tracking control of a gun launched micro aerial vehicle[R].Washington DC:AIAA,2012.
[8]KIM D.A design of CMAC based fuzzy logic controller with fast learning and accurate approximation [J].Fuzzy Sets and Systems,2002,125(1):93-104.
[9]韩京清.从PID技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.
[10]黄一,张文革.自抗扰控制器的发展[J].控制理论与应用,2002,19(4):485-492.
[11]苏丙末,曹云峰,陈欣,等.基于BACKSTEPPING的无人机飞控系统设计研究[J].南京航空航天大学学报,2001,33(3):250-253.
[12]PAN J F,CHEUNG N C,YANG J M.Auto disturbance rejection controller for novel planar switched reluctance motor [J].IEEE Proceedings:Electric Power Applications,2006,153(2):307-316.
[13]SUN Dehui,SHI Yuntao,LI Zhijun.Research on multi-objective optimal tuning of auto disturbance rejection controller [C ]//Proceedings of IEEE International Conference on Automation and Logistics 2007.Jinan:ICAL,2007:1437-1441.
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2020年3期)2020-12-25
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
北京航空航天大学学报(2017年6期)2017-11-23
铁道科学与工程学报(2015年5期)2015-12-24
科技传播(2014年4期)2014-12-02