
机器人触感装置力位解耦控制策略研究
2015-09-16 00:42张海滨鹤壁煤业技师学院河南鹤壁458030
机电工程技术 2015年6期
张海滨(鹤壁煤业技师学院,河南鹤壁458030)
机器人触感装置力位解耦控制策略研究
张海滨
(鹤壁煤业技师学院,河南鹤壁458030)
通过将触感装置关节处的摩擦计入到系统的动力学模型中,在现有的力位补偿方法基础上分别建立摩擦力、重力、惯性力补偿模型进行附加力补偿,对于附加位移也通过建立附加位移模型进行了补偿,从而有效地提高了系统透明性及稳定性,使触感装置的控制精度更高,抗干扰能力更强。
触感装置;补偿;附加位移
随着虚拟现实技术和交互式遥操作机器人技术的快速发展及广泛应用,可作为人机接口装置的触感装置的需求量逐年攀升。触感装置既可以直接通过操作者手部位置信息控制远端机器人或虚拟现实中的机器人,实现遥控操作[1]。同时,它也将从端机器人或者虚拟环境中传感器感觉到的力或力矩信号反馈给操作者,使得处于近端的操作者拥有临场感,实现远距离作业或者与虚拟环境的触觉交互。无论在虚拟现实领域还是遥操作领域,透明性的研究一直是各国学者研究的热点,其中,影响其透明性的因素之一即为触感装置的动力学特性,其主要表现在两方面,其一是触感装置的力位耦合使得触感装置本身的重力、摩擦力以及惯性力等连同反馈作用力一起反馈给操作者,使操作者不能感受到真实的作用力,影响下一步操作,另一方面是力位耦合使得从端或者虚拟环境传递回的反馈作用力对触感装置的位置命令信息产生干扰,导致从端或者虚拟环境从手不能准确的跟踪触感装置的位置命令。本文针对触感装置的动力学特性,展开对其力位解耦的控制研究。根据触感装置的完整动力学模型,建立了附加位移模型。
1 附加力补偿
引入力反馈时,计入附加转矩的动力学模型应为:

θmu表示触感装置期望关节运动轨迹,从式(1)可以看出,为了使操作者感受的力矩等于反馈力矩:

对于触感装置的附加力矩,分三部分对其进行补偿,主要补偿重力、惯性力和摩擦力对反馈力的影响[2]。
为消除重力、惯性及摩擦对反馈作用力的干扰,各国研究者做出了巨大的努力,本文在总结各种力补偿方法的基础上提出了自己的见解。
1.1重力补偿
对于重力补偿的问题主要通过机械结构的优化,通过丝传动设计,可以将控制关节及传递力反馈信息的电机安装在触感装置底座中,这样就减少了重力项在触感装置动力学中的影响,剩余的机械结构部分重力影响通过建立的数学模型,利用该模型的转矩输出,实现对重力的补偿。
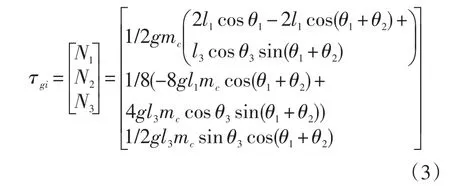
根据其重力项的相应计算,给予对应的重力补偿:
1.2摩擦力补偿
现有两种策略可用于摩擦力的补偿。
(1)通过对触感装置特性的研究选择了Cou⁃lomb+Viscous摩擦模型,将其计入整体动力学模型中。通过建立摩擦力模型,利用该模型的转矩输出,可以实现对摩擦力的补偿。

(2)对包括触感装置摩擦力在内的一些外界干扰力,通过设计干扰观测器对其进行了预测,并且通过仿真可以看出其估测较准确,可以通过干扰观测器的预测对触感装置进行实时的补偿。
1.3惯性力补偿
由于惯性力为变量的二阶项,在实际应用中归类于噪声,难于估计,所以触感装置在惯性力补偿方面的研究工作现阶段少见于文献,在触感装置的操作过程中,不能忽略惯性力对反馈力的影响,因为操作者不可能时刻保持匀速运动,当加速或减速时,不可避免的产生惯性力,与反馈力叠加在一起。本文通过建立惯性力的数学模型,利用其数学模型的输出转矩来实现惯性力的补偿。
惯性力之所以难以确定,源于其实时位移的二阶项难以确定,本文设计加速度观测器对触感装置加速度进行观测,进而获得其惯性力,并进行相应的补偿。
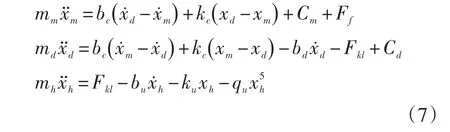
触感装置的动力学模型为:

其中,τs为操作者的抓持力映射到各关节的关节力矩,为操作者施加给触感装置的力或力矩,亦可称为操作者感受到的反馈力及力矩,可通过在触感装置的夹持部分的力觉传感器测量得到,为触感装置jacobin矩阵,θ为电机关节转角,τm为电机转矩。
从式(5)中,忽略哥氏力项的影响,本文设计加速度观测器为:

2 位置补偿
现有的补偿方法主要体现在图1中的低通滤波器Ku,低通滤波器Kλ及附加模型的传递函数bs三部分上,下面将详细介绍其补偿策略。
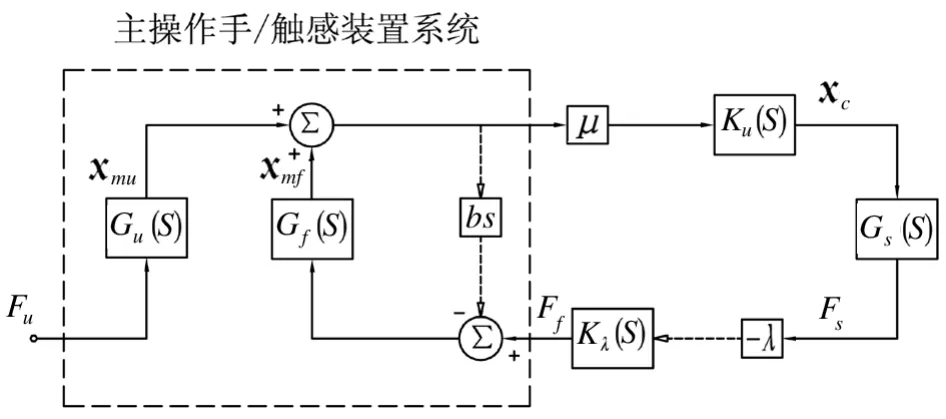
图1 附加位移补偿框图
2.1位置补偿方法概述
(1)局部微分反馈补偿法。其本质是在其控制系统中加入局部微分反馈,使得触感装置的阻尼增加。此阻尼项叠加到力反馈信号中,一起作用于触感装置驱动电机,但是此阻尼项施加的是与反馈力方向相反的控制信号,把电机的速度限制到了一定的区域内。局部微分反馈补偿法有效地抑制了系统的振荡,但却使得控制系统的动态响应能力降低。
(2)位置信号滤波补偿法。该方法的本质是在从操作端通过一个低通滤波器Ku对系统的从操作手位置指令进行补偿,低通滤波器有效地降低了触感装置位移指令中的高频成分,提高了系统的稳定性,但是从操作手的快速性及跟踪性却受到了限制。
(3)反馈力信号滤波补偿法。该方法也是通过对位置信息的补偿实现的,类似于上面提到的方法,其本质是在通过一个低通滤波器Kλ,将力反馈信息中的高频瞬变成分过滤掉,然后再将此力反馈信息传递给触感装置,减少了力反馈信息对系统的附加位移量,提高了系统稳定性。但是,由于缺失了力觉信息中的高频成分,操作者不能感受真实的力觉信息。
触感装置位置补偿的实质是,以反馈力矩τf为输入,当它与抓持力矩τu不匹配时,触感装置便会产生附加位移θmi,θmi可经系统动力学正解得到,将其与编码器输出的触感装置实际位移θm加在一起,得到操作者预期的主手位移θmu,作为运动指令发送给从手。本设计通过建立附加位移模型,通过参数辨识得到其具体模型,将附加模型计算得到的位移量计入到系统的位置控制信息中,消除附加位移。
2.2附加位移模型及补偿
设计触感装置的附加运动模型如图2所示,根据机电网络的对比关系,可得到如下方程:
其中:
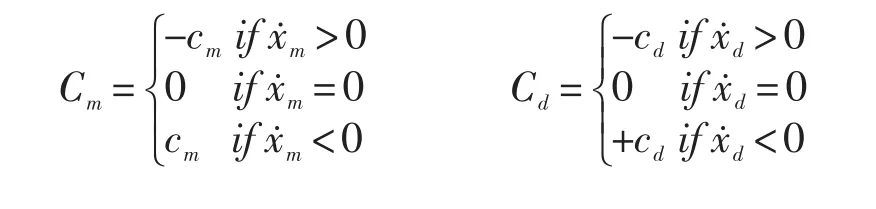

图2 触感装置非线性集总参数模型
通过对上述模型的参数辨识,可得到系统的具体附加位移模型。

此系统的传递函数为:

通过计入附加模型,得到更加精确的位置命令xc,如式(8)所示。

图3 附加位移模型
3 结束语
本文简要介绍了力位解耦问题及现有的力位补偿方法,在此基础上分别建立摩擦力、重力、惯性力补偿模型进行附加力补偿,对于附加位移也通过建立附加位移模型进行了补偿,此外通过设计直接力反馈控制结构,完成对触感装置的整体设计。
[1]孟建军,贠今天,刘钢,等.6+1维力反馈触感装置[P].中国专利:CN201110045093.6.
[2]古军保,贠今天,董旭,等.具有力—位补偿的触感装置控制体系结构[J].机电工程,2009(9):73-76.
(编辑:阮毅)
Robot Tactile Device Power Decoupling Control Strategy Research
ZHANG Hai-bin
(HebiCoal Technical Institute,Hebi458030,China)
In this article,through the haptic device friction joints in to the system dynamicsmodel,based on the force of the existing compensationmethods respectively to establish the friction,gravity,inertia force additional force compensation,compensationmodel for additional displacement is through the establishment of additional displacementmodel compensation,so as to effectively improve the system stability,transparency and higher controlprecision of the haptic device,strongeranti-interferenceability.
haptic device;compensation;additionaldisplacement
TP242
A
1009-9492(2015)06-0056-03
10.3969/j.issn.1009-9492.2015.06.013
2015-01-09
张海滨,男,1979年生,河南周口人,大学本科,讲师。研究领域:机电技术。已发表论文9篇。
猜你喜欢
小资CHIC!ELEGANCE(2021年40期)2021-11-08
锻压装备与制造技术(2021年2期)2021-07-19
发明与创新(2021年17期)2021-07-05
中学物理·高中(2019年8期)2019-09-20
重型机械(2019年3期)2019-08-27
测控技术(2018年5期)2018-12-09
电子制作(2018年9期)2018-08-04
浙江大学学报(工学版)(2016年9期)2016-06-05
中国工程咨询(2016年2期)2016-02-14
Coco薇(2015年12期)2015-12-10
