
一种用于安保的水下机器人设计
2015-09-16 00:42彭阿静中国船舶重工集团公司第710研究所湖北宜昌443003
机电工程技术 2015年6期
彭阿静(中国船舶重工集团公司第710研究所,湖北宜昌443003)
一种用于安保的水下机器人设计
彭阿静
(中国船舶重工集团公司第710研究所,湖北宜昌443003)
从载体结构、软件及硬件方面对一种用于安保的水下机器人作了介绍。并提出了该水下机器人的设计难点及相应的解决措施。试验结果表明该机器人能较好地满足使用要求,对于同类产品的设计具有一定的借鉴价值和推广意义。
安保;水下机器人;关键技术
0 前言
水下机器人目前已成为水下观测和水下作业最有效的装备[1]。水下机器人技术也逐渐成为研究热点,很多研究所和高校都致力于水下机器人的研究并相继研制了多型样机。本文设计的水下机器人主要用于涉案水下现场调查,水下刑事证物的搜索和小型物件的打捞,是一种用于安保的水下机器人。
设计的水下机器人能从各种支持平台上布放回收,并具有以下主要功能:
(1)能够实现水中前进/后退、左转/右转、上浮/下潜三维机动能力,并具有自动深度保持、自动航向保持功能和较好的可控制性能;
(2)具有比较完善的安全性,包括深度超限报警、漏水报警、防碰撞保护、紧急状况下自动快速上浮等功能;
(3)能够实现一定的水下目标探测定位功能和水下小型物体打捞功能;
(4)能够测量其自身参数及运动状态,如航向角、深度等,并能在水面控制台实时显示其状态信息、位置信息、电视图像以及声纳图像。
1 系统组成及工作原理
1.1系统组成
没有一种能够完成所有任务的水下机器人。因此首先必须根据任务使命要求,结合使用水域条件,构建系统的软硬件体系[2]。安保用水下机器人采用ROV形式,组成从结构上可划分为水面支持设备和水下载体两大部分,系统组成框图如图1。水面支持设备包括水面操控台、定位设备(包括方位传感器、卫星定位(GPS)、水声跟踪设备)、绞车、水面供电装置等。水面与水下通过卷绕在绞车卷盘上的光电复合缆进行信息传输。
1.2工作原理
水下载体的空间运动是由水面操控台上的两个操作手柄分别控制主推进器和辅推动器完成的。主推进器同速同向转动时,机器人进行直航运动;同速反向转动时,机器人可实现原地转动;差动转动时,机器人进行转弯。辅助推进器用于实现机器人的上浮和下潜运动。两个推进器的联合作用,可使机器人能够在一定距离上绕目标转动。水下载体安装有声纳、水下电视、摄像装置和机械手,用于对目标的探测、识别和打捞。此外机器人还配置有与控制相关的磁罗经、深度计、漏水报警器等传感器。磁罗经、深度计可实现其定深定向航行,漏水报警器实时检测耐压壳体的水密。机器人还装载有超深抛载和应急抛载,一旦机器人航行超过设定安全深度或遇到紧急情况(如进水、超深、姿态失控等),则释放压载,机器人由于正浮力增加而自动上浮至水面。
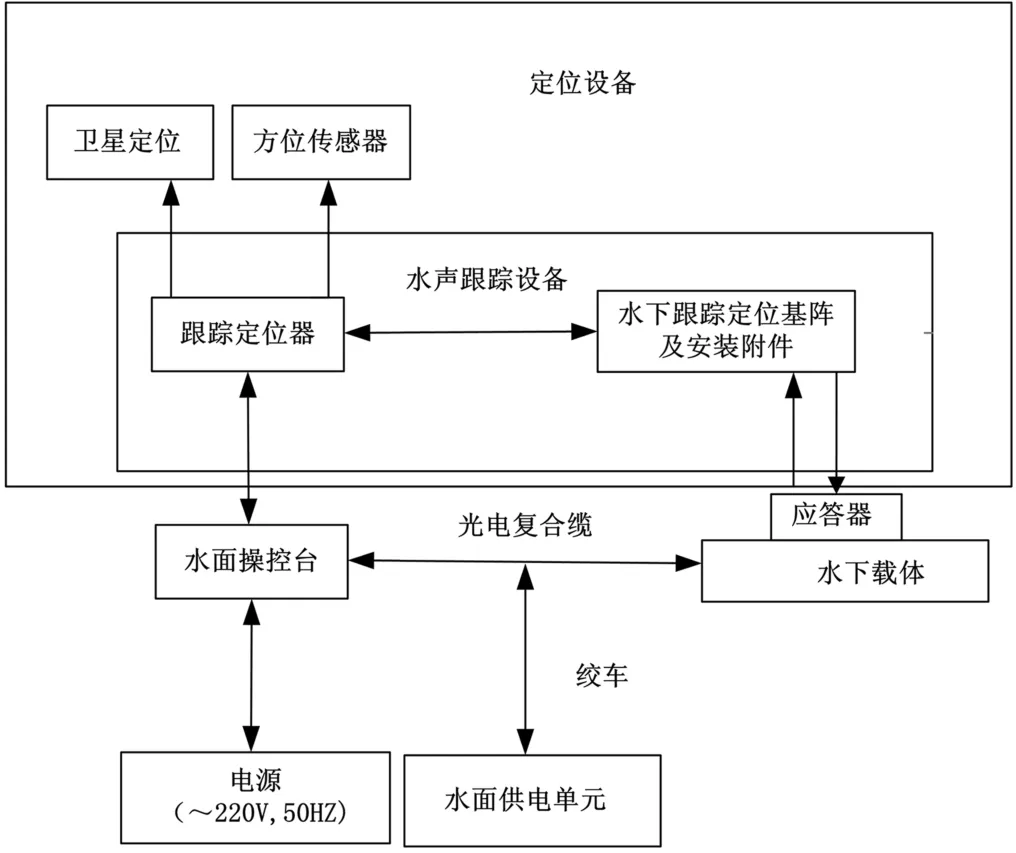
图1 系统组成框图
2 水下载体结构
水下载体采用流线型加外围框架的外形结构。由头部球冠形迎流壳体、中部圆柱形平行壳体和尾部圆锥形去流壳体组成ROV的主壳体流线型外形。该外形具有阻力小、功耗低的优点。为防止主壳体受到碰撞而损坏,同时方便加挂设备仪器来扩展ROV的作业能力,在主壳体周围安装有外围框架。探测设备和观察设备按功能模块分别密封,安装在头部。中部为铝合金材料制造的耐压壳体,提供电子功能设备的装载空间。并在壳体内铺设有导轨,可用作电子功能设备进、出壳体的运行轨道和安装固定的支撑平台。尾部是用玻璃钢材料制造的轻质壳体。用水平外挂的两个主推进器和倾斜外挂的两个辅助推进器来实现水下载体的空间运动。推进器采用模块化设计,由一体化电机直接驱动螺旋桨,并在螺旋桨外安装有导流罩以提高推进效率。此外用水密插座与水密插头对接实现推进器与机器人的电气接口。
3 控制系统
控制系统是水下机器人的核心部分,它由相应的软件和硬件组成[3]。
3.1控制软件
控制软件主要包括多媒体视频显示、串行通讯、数据采集与处理、I/O控制、航向控制、深度控制、安全性控制等模块。用于安保的水下机器人的控制系统采用分布式控制,主要由水面操控台和水下控制单元组成,水面与水下的信息通过光电复合缆中的光纤实时传输。水下载体通过A/ D采集接口采集各传感器信息,通过开关量I/O接口采集电机各状态参数,采用D/A接口模块控制推进电机的转速。水下载体的所有状态参数和传感器数据经水下控制单元处理后发送至水面操控台显示。操作员通过两个手柄实现对水下载体的运动控制和作业过程中的各功能操作控制。
3.2控制硬件
控制硬件采用基于CPCI总线接口标准的板卡构成高性能、可靠的嵌入式系统,主要由系统核心板、CAN通信接口板、串口通信扩展板、电源板及底板构成。使用Intel双核处理器,支持Win⁃dows XPWindows2000/Vista操作系统。机箱为全封闭结构,采用无风扇设计,具有防水功能,支持5路CPCI外围卡扩展。机箱内各功能模块采用标准的3U CPCI板卡。采用全金属盒密封技术(CPCI总线插座外露),提高电磁兼容能力;板卡使用整块冷板作为散热器,提高散热能力;模块之间保留一定的风道,不因采用金属盒密封而损失了CPCI板卡的散热优势;在金属盒正面(对应到CPCI的前挡板),设置适当的LED指示、测试点等,提高系统的测试性、维修性。
4 设计难点及解决措施
4.1总体结构的小型化
安保用ROV要满足能从各种支持平台上便于布放和回收的要求,因而决定了其水下载体要具有体积小、质量轻的特点。为此对水下载体采用了模块化的设计思路,将主壳体按功能划分为不同的模块舱,并对推进器、传感器、信号处理器等模块单元在满足性能和功能指标的要求下进行小型化设计,通过标准的机械接口和电气接口将各个独立的模块单元连接起来,形成初步的总体布局。在初步确定的总体布局基础上,利用相关软件仿真分析,进行优化设计,提供合理的总体布置方案,合理布局各功能模块的装载空间,同时便于拆装、调试和维修。
4.2对目标较高的探测、识别能力
安保用ROV是一种集观察与作业功能为一体的水下机器人,要求对目标有较高的探测、识别能力。但由于水下坏境的特殊性和水作为传播介质的一些特性以及悬浮物、水流等因素影响,都会给最终的视觉任务带来很大的影响[4]。本方案采用了对光学图像和视频信息具有获取、处理、特征提取等能力的水下机器人光视觉目标识别技术。并采用一些措施来提高ROV对目标的探测、识别能力:选用传感器与信号处理分装的探测识别设备,将信号处理部分放到母船或岸基上的控制台内,只将传感器和电路部分放在水下载体上;选用高性能的声纳和水下电视;在摄像机上安装辅助照明灯,辅助照明灯可根据图像灰度和自然光照,自动调节光强以获取更清晰的图像;为增大观察视角,探测设备和观察设备安装在能在±90°范围内进行俯仰动作的云台上。
4.3完善的系统集成和电磁兼容设计
安保用ROV总体结构的小型化决定了在有限的空间内,各个功能模块在布置上应尽量紧凑。而为了保证信息流传输的可靠性和运动控制的稳定性,要求系统有较强的抗电磁干扰能力。因此采用了屏蔽、滤波和接地等一系列措施防电磁干扰。将电缆套上屏蔽层以切断电磁干扰沿信号线或电源线传播的路径;将不同功能模块安装在用铝合金材料制作的屏蔽箱体内,并在箱体缝隙填充导电橡胶条以消除不导电点,防止电磁波泄露;对电源内部布线时,充分考虑其电流的方向,以使电流产生的磁场相互抵消,避免形成电流环;强电和弱电设备以及线缆按强电及弱电、高频及低频、敏感及干扰等不同类别的分组安装、布线;在制造工艺上对主壳体及连接结构件在焊接加工过程中进行退磁处理;对磁性较强的部组件,考虑整体消磁处理。
4.4较好的机动性和操纵性
受水下环境复杂及水声噪声的影响,各种水声定位设备普遍存在精度较差、跳变频繁的缺点。同时安保用ROV自身体积小、质量轻的特点,使其更易受到水流、浪涌、涡场等的影响。为保证ROV的高效作业,要求水下载体有较好的机动性和操纵性。设计上采用了一系列措施来提高ROV的运动控制。壳体连接处光顺平滑,无局部的凸起和凹陷部分,并对突出的吊环、推进器进行整流设计以降低水动力噪声;电机出轴直接驱动螺旋桨和严格控制电机转子的转动平衡以减小推进噪声;对主要振动源进行隔振减振处理,并适当采用阻尼材料制作连接件隔离振动源来降低振动噪声;采用滤波技术消除水声传感器的跳变及无效数据;提供水下载体低阻力的流线型外形、合理的流体动力布局以及衡重参数,使其具有良好的航行性能;在去流壳体外粘接呈“十”字形的四个翼板来提高ROV航行的稳定性;加装配重压载或浮力材料使能进行俯仰动作的部分在水下处于静平衡,以避免俯仰动作对ROV运动平稳性的干扰;增加推进器的功率以提高ROV顶流作业的能力。
5 总结
安保用水下机器人于2010年在珠江水域进行了交付试验,试验结果表明该机器人能满足使用要求,具有良好的操纵性和平台稳定性。并且性能可靠。本机器人对于同类产品的设计具有一定的借鉴价值和推广意义。
[1]蒋新松,封锡盛,王棣棠.水下机器人[M].沈阳:辽宁科学技术出版社,2000.
[2]彭学伦.水下机器人的研究现状与发展趋势[J].机器人技术与应用,2004(4):43-47.
[3]David Smallwood,Ralf Bachmayer.A New Remotely Op⁃erated Underwater Vehicle for Dynamics and Control Re⁃search[J].Department of Mechanical Engineering Johns Hopkin University,Sep.1999.
[4]唐旭东,朱炜,庞永杰,等.水下机器人光视觉目标识别系统[J].机器人,2009(3):171-178.
(编辑:阮毅)
Design of an Underwater Vehicle for Security
PENG A-jing
(The 710thResearch Institute,China Shipbuilding Industry Corporation,Yichang 443003,China)
The paper presents structure,software and hardware of an underwater vehicle for security.And it gives the corresponding solutions for the design difficulties.Experimental results show that the underwater vehicle canmeet the requirements better.Ithas certain reference valueand promotion significance for the design ofsimilarproducts.
security;underwater vehicle;key technologies
TP242
A
1009-9492(2015)06-0059-03
10.3969/j.issn.1009-9492.2015.06.014
2014-06-23;
2015-04-24
彭阿静,男,1986年生,湖北仙桃人,硕士,工程师。研究领域:水下机器人结构设计。已发表论文2篇。
猜你喜欢
公民与法治(2022年6期)2022-07-26
减速顶与调速技术(2022年3期)2022-02-11
舰船科学技术(2021年12期)2021-03-29
制造技术与机床(2019年4期)2019-04-04
当代陕西(2018年12期)2018-08-04
传媒评论(2017年9期)2017-12-20
广东技术师范大学学报(2016年5期)2016-08-22
中国总会计师(2016年2期)2016-03-28
焊接(2016年2期)2016-02-27
学习月刊(2015年10期)2015-07-09
