
带你“玩转”未知环境
2015-10-12 09:23谢超
科学大众(中学) 2015年9期
2015年4月11日,第26届江苏省青少年科技创新大赛在宜兴顺利举行。经过3天的展示、答辩、交流活动,最终,来自江苏省锡山高级中学高三(9)班的谢超同学,以《基于航位推算法定位与深度优先遍历的未知环境遍历系统》斩获本次大赛最高奖“江苏省人民政府青少年科技创新培源奖”。谢超同学是本次大赛唯一获此殊荣的高中生,下面就让我们走近他的世界,看看他的研究成果是如何一点一滴地酝酿出来的。
流行歌曲《Call?Me?Maybe》的MTV讲述了这样一段有趣的故事:在明媚的阳光下,相貌英俊的男主角在自家后院的草坪上修剪草坪。他优雅地推着剪草机,就像在悠闲地散步。觉得热了,他便脱下身上那件白色背心,露出匀称的胸肌。这一幕恰巧被女主角瞥见,一段浪漫的爱情故事就此展开。
我们不妨换个场景:男主角在一片足球场上修剪草坪。这时,恐怕不仅女主角无法对他一见倾心,可怜的男主角也会因此愁眉苦脸,抱怨不已。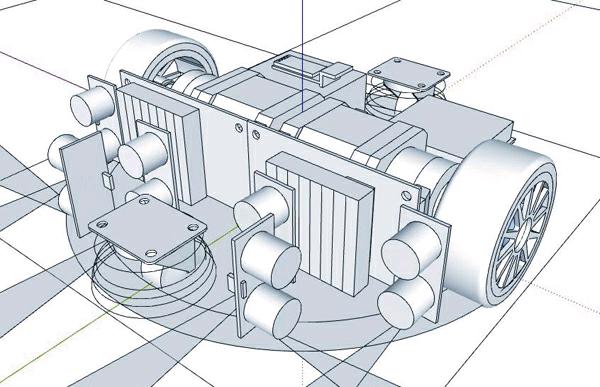
我倒是觉得,这种枯燥的工作应当由机器人来完成。也许只要给剪草机安上电池,再加个控制器来操纵它,用蛇形走法走完整个足球场就行了,反正足球场的长宽是已知的,事先设定好路线就行。
可是,如果换在未知环境中呢?要解决这个问题,其实只要解决定位和遍历这两大问题,接着设计一个模型车,再测试一下就OK了。
定位就是要确定模型车在未知环境中的绝对坐标和方向。
比如,常见的GPS就是一种手持定位设备,在地球上可应用于经纬度、海拔等信息的定位。你也许会想,既然GPS都可以在地球这么大的环境中定位了,那么应用在上述环境中肯定是轻而易举的。但是,上述问题定位的精度要求相对较高,民用GPS的定位精度只有几米,肯定没法满足。
不过,还有一种常见的“惯性导航”定位技术非常适合解决这个问题,这种技术被广泛地应用于航空航天、船舶定位等精度要求高的领域。这种技术听起来好像很厉害,但从原理上来说却很好理解。它利用传感器测出移动物体的加速度,再对加速度二次积分,就能推算出物体的坐标。但是,这种方法还是不可行,原因很简单,便宜的加速度模块精度和GPS差不了多少,能达到精度要求的模块价格至少是五位数,而且操作很复杂。
那怎么办呢?利用测速测向设备的推算导航,这个办法和惯性导航差不多,不同的是测速度,然后一次积分,而且模块便宜,精度又好。这种方法的缺点是有误差,要用PID进行反馈控制。至于PID如何操作,我也不太清楚。它是大学里自动化专业教授的东西,因此这个方案也行不通。
那么是不是就没法解决定位问题了呢?条条大路通罗马!还有一个看起来都算不上是个定位方法的办法:直接开环控制。所谓开环,我想举个倒水的例子:你要用饮水机接水,可以用眼睛看水有没有满,快满的时候就松开放水的按钮,像这样运用一些参考量来反馈控制输出量的方法就是闭环控制;相反,如果你接水的时候在和别人聊天,完全没有注意到水杯里的水位,也就是说这时你的眼睛没有提供一些参考来供你判断输出量(杯中水量)是否达到了预期(倒满),这就是开环。
开环的好处在于控制简单。只需要执行部件,即用手按放水按钮,但不需要提供参考的部件,即眼睛,也不需要根据参考信息来反馈控制输出量。这种方法的缺点是应对误差的能力差,闭着眼睛倒水,水可能溢出来。这个方法也不靠谱,看起来完全没法应用到实践中。比如,每秒钟产生1厘米的误差,十分钟后就达到了6米,误差累积起来是很可观的。
我们不妨换个思路,如果我们能够使误差尽可能的小,即使采用开环策略,我们也能在较短的运行时间内获得较高的精度。这就是我采用的方案,简单但可行。
猜你喜欢
文萃报·周二版(2022年14期)2022-04-09
阅读(低年级)(2021年3期)2021-06-02
当代体育(2020年16期)2020-09-10
小星星·阅读100分(低年级)(2020年3期)2020-04-01
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
小天使·二年级语数英综合(2016年5期)2016-05-13
孩子(2016年4期)2016-04-13
海峡科学(2013年3期)2013-10-21
