清扫机器人自主充电系统的设计
2015-10-19 10:02无锡科技职业学院江苏无锡214028
网络安全与数据管理 2015年22期
李 进(无锡科技职业学院,江苏 无锡 214028)
清扫机器人自主充电系统的设计
李 进
(无锡科技职业学院,江苏 无锡 214028)
在设计了充电站的硬件电路(包括电源电路、可由软件及硬件调节充电电流的电池恒流充电电路及定位编码信号发射电路)的基础上,提出了一种机器人采用随机行走模式在未知环境下自动找寻充电站的全新自主充电算法,使机器人具备自主找寻充电站充电的能力。
清扫机器人;恒流源;自主充电算法;智能
0 引言
自主清洁机器人作为服务机器人的一种,能够使人们从繁重的清洁工作中解脱出来,具有广泛的应用前景。目前清洁机器人已经进入实际家庭使用,如伊莱克斯公司的“三叶虫”、Kent公司设计出清扫机器人Robo-Kent、国产清扫机器人 KV8。当机器人电量不足时,能够自动地返回充电站进行充电是现有机器人的一个实用功能,根据家居智能清洁机器人的自动充电功能需求,与苏州某公司合作开发设计了一款低成本、能自主充电的适用型家居智能机器人,目前已投入生产,效果良好。
1 充电站硬件设计
充电站主要负责与机器人的红外通信,发射召回信号,引导机器人自动返回充电站进行充电。机器人在电量充足时对充电站发出的信号不做响应,当检测到自身电量不足时,机器人通过充电站发射的红外召回信号及相应算法自动返回充电站充电。
1.1 充电站结构
机器人在电池电量不足时能够在消耗最少电量情况下以较短路径自主返回充电站,是其能够长期高效率自主工作的重要环节。为了保证机器人自主返回充电,充电站的结构和电气设计必须满足要求,充电站外形如图1所示。
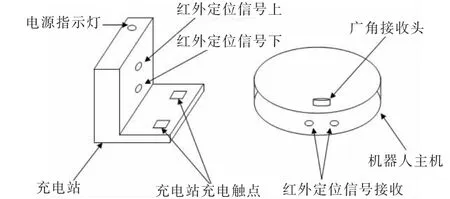
图1 充电站硬件组成图
充电站包括外壳、两片充电触点、电源指示灯、上对接红外发射器和下对接红外发射器[1]。在清洁机器人底部有正负两个金属充电电极,在充电站上有两片金属触点,当充电电极与金属片接触上即可进行充电。清扫机器人前端中间位置装有两个红外接收管,它们之间的夹角为45°,清扫机器人前端顶部也装有一个红外接收管,并在其上方安装了光学全反射元件,即广角接收,使得清扫机器人能够在360°的有效范围内都能接收到来自充电站的信号。
1.2 充电站工作原理
充电站的上、下两组发射器均发出红外调制编码信号,供机器人寻找充电站时定位使用。自主返回充电的基本要求就是精确对准,以便机器人的充电电极和充电站上的充电触点可靠连接进行充电。由于红外发射管的信号区域接近于一个扇形,难以实现机器人和充电站的精确对接,因此本设计在红外发射管前方添加黑色塑料挡光片,挡光片之间留一个窄缝,这样发射信号区域几乎成一条直线,其有效距离约为4m,宽度为0.1~0.3m。这样,清扫机器人寻找充电站的活动区域便分为两个部分,有信号区和无信号区。有信号区是一个狭长的区域,长度约为4m,宽度为0.1~0.3m。这个区域外为无信号区。信号覆盖示意图如图2所示。
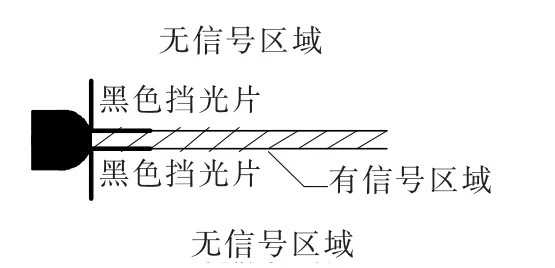
图2 信号覆盖示意图
1.3 充电站硬件电路设计
1.3.1 电池恒流充电电路设计
由于机器人所使用的电池为14.4 V直流镍氢电池,采用恒流方式进行充电,为此需要设计充电所需的恒流源电路,为电池充电时提供稳定的充电电流[2-4]。
恒流源电路如图3所示。电路采用两级运放,第一级运放组成一个电压跟随器,提高整个电源的输入阻抗,C1、C2组成 π型滤波,驱除干扰信号。第二级电路组成电流负反馈,提高恒流输出电流的稳定性。
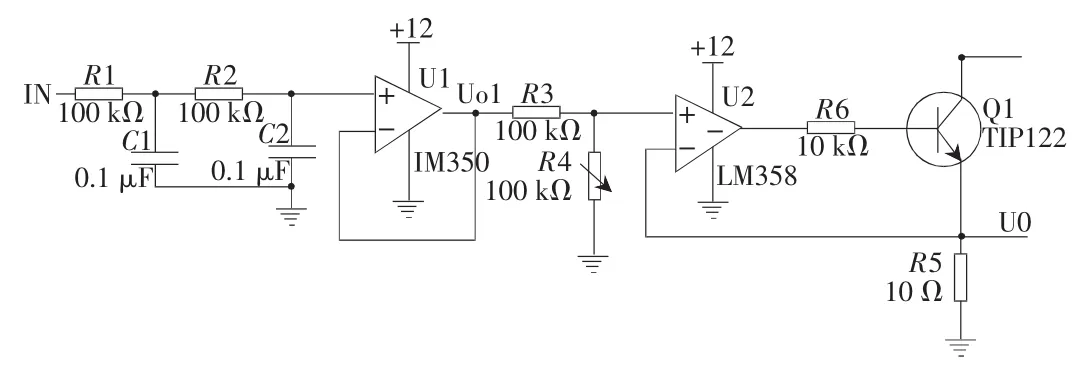
图3 恒流源电路
第一级运放的输出电压:U01=UIN。


由此可见,电源的输出电流与 UIN成正比,且与 R3、R4、R53个电阻成正比,当 UIN和电阻的比例系数保持恒定时,即可保证该电源的输出电流是恒定的。用户既可通过调节选择电池的充电电流,也可以采用软件PWM信号对UIN进行无级调节,从而选择所需的充电电流。
1.3.2 电源电路设计
电源电路将220 V交流电经过变压、桥式整流、电容滤波以及稳压4步,最后得到系统所需的直流电源,电路如图4所示。
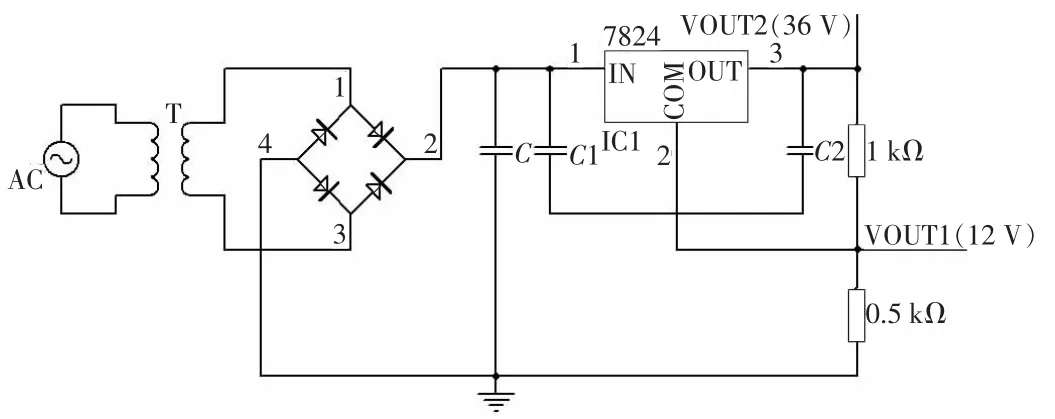
图4 电源电路
由于上述恒流源电路中的运算放大器U1和U2采用+12 V电源供电,电池所需的直流电压为24 V,同时考虑到TIP122以及R5的压降,因此负载所需的电压设计为36 V(此电压可根据具体要求进行调节)。所以电源电路采用7824进行分压以及扩压得到系统所需的12 V和36 V电压。图4中R1取1 kΩ,R2取0.5 kΩ,VOUT1=24×(1+0.5)=36 V,VOUT2=24×0.5=12 V,滤波电容C越大越好,此处取 4700μF,C1和C2取典型值,分别为0.33μF和0.1μF。
系统控制部分采用直流5 V电源供电,采用三端稳压芯片78L05,如图5所示。其中C6、C7、C8为滤波电容[5]。
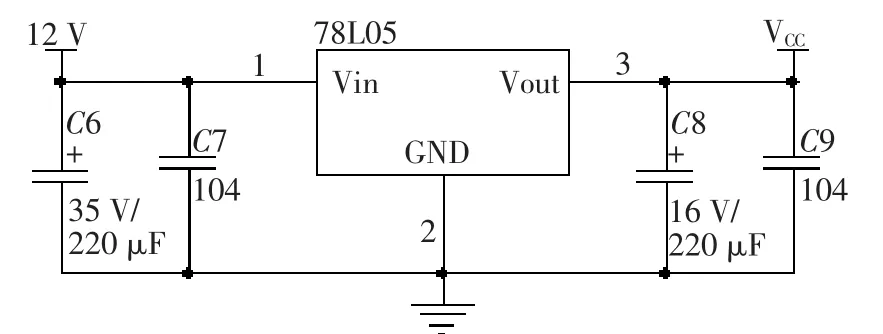
图5 系统控制部分电源电路
1.3.3 充电站定位编码信号发射电路设计
充电站采用发射红外信号的方式引导机器人自动返回充电站,充电站的上、下两组发射器均发出红外信号,为防止充电站发出的红外信号受到阳光、电灯等其他因素的干扰,充电站发射的红外信号采用调制波进行编码,机器人在收到红外信号并解调后,如编码与充电站发射一致,则执行自动充电程序,否则不做处理。
图 6中 D1、D2为红外发射二极管,R1、R2、R3、R4为限流电阻,用以保证红外发射管工作在允许工作电流内,载波信号由单片机产生,经电阻R6与三极管Q1相连,编码信号由单片机产生,一路经电阻R7与三极管Q2相连,另一路经电阻R8与三极管Q3相连,采用24 V作为发射电压。
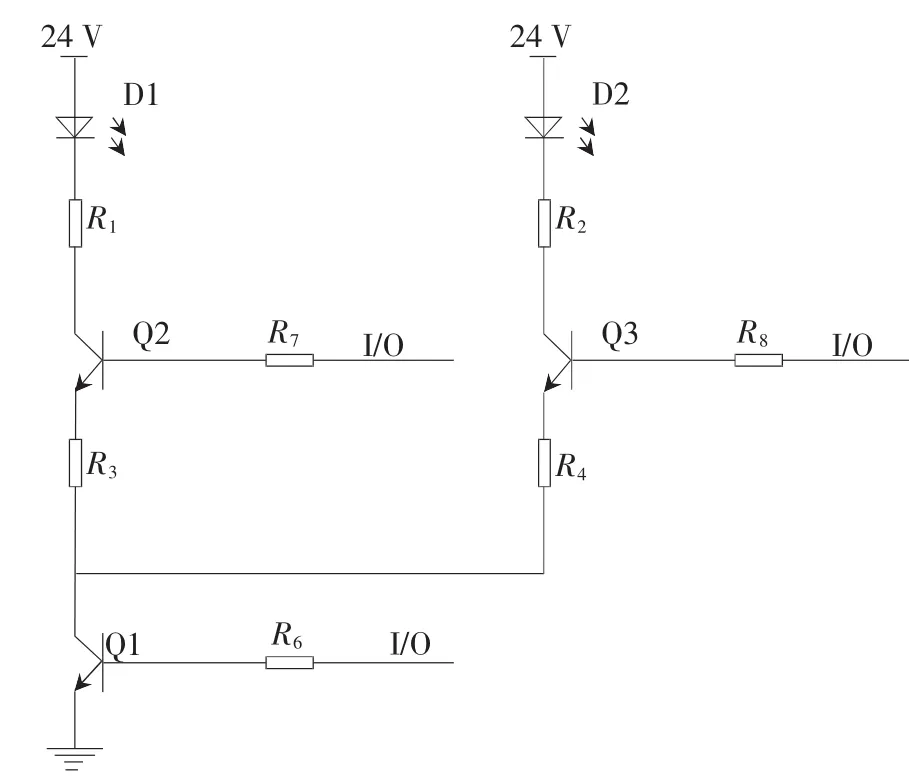
图6 充电信号发射电路
2 自主充电算法
清扫机器人自动返回充电时采用随机行走模式,只要充电站正前方的信号区内没有物体遮挡,清扫机器人总会经过有信号区。
充电算法主要分为以下4步:
(1)找寻充电站算法
清扫机器人采用随机行走的方式找寻充电站,途中若遇到障碍物则执行避障算法。清扫机器人随机行走时,只要上部广角接收管收到充电站发出的信号,则认为已找到充电站,进入对接算法程序。
(2)对接算法[6]
在找到充电站后,根据不同情况执行对接算法。
上部广角接收管收到信号,机器继续前行0.1m,右转,若右转过程中前方中间两个接收管均收到充电站信号,则认为已与充电站对准,机器直行,并进入精确对接算法;若右转400°后,前方两个接收管不满足同时收到信号的条件,则认为机器处于信号边界区域,进入调整方向算法;若前方两个接收管均未收到充电站信号,则认为是误信号,则后退一段距离,继续直行,执行找寻充电站算法。
(3)调整方向算法
调整方向算法:前方两个接收管不满足同时收到信号的条件,则认为机器处于信号边界区域,此时让机器右转,右转过程中,若上部广角接收管收到信号,则机器继续前行0.1m,再右转,若右转过程中前方中间两个接收管均收到充电站信号,则认为已与充电站对准,机器直行,并进入精确对接算法;若右旋转400°后,前方两个接收管还不满足同时收到信号的条件,则认为机器处于信号左边界,此时让机器后退 0.1m,左转,左转过程中,若上部广角接收管收到信号,则让机器直行0.1m,再左转,若左转过程中前方中间两个接收管均收到充电站信号,则认为已与充电站对准,机器直行,进入精确对接算法;若左转400°后,前方两个接收管仍不满足同时收到信号的条件,则机器直行,退出调整方向算法,进入找寻充电站算法。
(4)精确对接算法
当清扫机器人中间两个接收管均收到信号时,则认为已与充电站对准,机器保持直行。但实际运行过程中,由于地面情况不同或是电机转速的微小偏差,有可能会使机器在直行过程中发生偏离,为此采用精确对接算法进行修正。
①若对接过程中中间两个接收管的状态为左接收管接收到信号,右接收管无信号,则认为机器向右偏离中心区域,此时机器人左转,若中间两个接收管均收到信号,则直行,若仍然是左接收管接收到信号,右接收管无信号,则机器后退 0.1m,左转,直至中间两个接收管均收到信号后,直行。
②若对接过程中中间两个接收管的状态为右接收管接收到信号,左接收管无信号,则认为机器向左偏离中心区域,此时机器人右转,若中间两个接收管均收到信号,则直行,若仍然是右接收管接收到信号,左接收管无信号,则机器后退0.1m,左转,直至中间两个接收管均收到信号后,直行。
③若对接过程中中间两个接收管的状态为左、右均无信号,则机器在原地停留2s,若停留时间内收到充电站信号,则执行相应算法,若2s后仍无信号,则继续直行,执行找寻充电站算法。
(5)异常情况处理算法
清扫机器人在与充电站对接时,突遇障碍物,此时清扫机器人终止对接算法,执行避障算法绕过障碍物后,继续寻找充电站。
综述自主充电算法步骤:首先机器人根据上部广角接收管是否收到信号寻找充电站进入信号区域,然后做出相应调整使机器人对准充电站直行,最后直行过程中根据中间位置夹角为45°的左和右两个接收器的信号修正和微调机器人的路线,实现精确对准,直到碰到充电站,算法结束。自主充电算法流程图如图7所示。
3 结论
经实践证明,该机器人完全满足自动返回充电功能要求;具有良好的人机交互功能,满足了产品设计要求,只是在找寻充电器的效率方面有待提高。
Cleaning robot autonomous charging system design
Li Jin
(Wuxi Professional College of Science and Technology,Wuxi 214028,China)
A system of cleaning robot′s independent charge containing hardware system and software system is designed.The hardware circuit of charging station includes a power supply circuit,the battery constant current charging circuit of charging current which can be regulated by the hardware and software,and position coding signal transmitting circuit.A new independent charging algorithm that the robot can search automatically charging station using the random walk model in unknown environment is presented,so that the robot have the ability to find independently the charging station.
cleaning robot;constant current source;independent charging algorithm;intelligent
TP242
A
1674-7720(2015)22-0009-03
李进.清扫机器人自主充电系统的设计[J].微型机与应用,2015,34(22):9-11,17.
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26
机电安全(2022年5期)2022-12-13
警察技术(2022年3期)2022-06-22
现代青年·精英版(2022年3期)2022-04-06
小天使·四年级语数英综合(2021年3期)2021-05-10
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
环球时报(2020-12-08)2020-12-08
房地产导刊(2020年6期)2020-07-25
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23
汽车文摘(2015年11期)2015-12-02