
改进的DPCA和ATI技术及其对比
2015-10-26 22:08杨箫王军锋
现代电子技术 2015年20期
杨箫+王军锋


摘 要: 通过改进合成孔径雷达(SAR)动目标检测(GMTI)的检测方法DPCA及ATI,并对两种方法的效果进行了对比。DPCA处理步骤为:坐标配准、相位补偿、杂波对消、均值平滑和阈值检测,而ATI处理步骤为坐标配准、相位补偿、杂波对消/干涉、均值平滑和阈值检测,除了第三步有所差异外,其余步骤均一样。在此着重改进坐标配准与相位补偿,为提高配准与补偿的精度以提高动目标检测的准确率,并使用亚像素级的频域配准方法。实测数据证明,经改进后的DPCA和ATI检测效果均良好,即使是强度极弱的动目标也能够被检测到。经对比分析,ATI在动目标检测上有更优良的性能。创新地使用亚像素级的频域配准方法,且该算法为自动算法,对系统参数精度无要求。
关键词: 合成孔径雷达; 地面运动目标检测; 偏置相位中心天线技术; 沿轨干涉技术
中图分类号: TN951?34 文献标识码: A 文章编号: 1004?373X(2015)20?0001?04
Contrast between improved DPCA and ATI technologies
YANG Xiao, WANG Junfeng
(Shanghai Jiao Tong University, Shanghai 200240, China)
Abstract: DPCA and ATI were improved for ground moving target indication (GMTI) of synthetic aperture radar (SAR). Their effects are compared and introduced in this paper. The processing steps of DPCA are coordinate correction, phase compensation, clutter cancellation, mean smoothing and threshold detection, and the processing steps of ATI are coordinate correction, phase compensation, clutter cancellation/interference, mean smoothing and threshold detection, which are the same except for the third step. The sub pixel frequency domain registration method was applied to improving the accuracy of coordinate correction and phase compensation so as to raise the precision of GMTI. The experimental results show that the improved DPCA and ATI detection have great detectability, even if the most weak moving target can be detected. It is found by comparison analysis that ATI has better detection efficiency than DPCA on GMTI. The innovation point of this paper is the sub pixel frequency domain registration method, which is automatic algorithm, and has no requirement to the accuracy of the system parameters.
Keywords: synthetic aperture radar; ground moving target indication; DPCA technology; along?track interferometry
0 引 言
地面运动目标检测是合成孔径雷达研究中的一个重要课题。通常有两种主要的研究方法:单通道SAR动目标检测和多通道SAR动目标检测[1?3]。本文主要研究多通道SAR动目标检测。偏置相位中心天线技术(DPCA)、沿轨干涉技术(ATI)和空时自适应处理(STAP)是多通道SAR动目标检测中的重要方法。DPCA和ATI都需要先对通道间的图像做坐标配准和相位补偿,这一过程的准确度将严重依赖于系统参数的准确性,如基线长度、载机速度等。本文提出一种配准与补偿算法,使得这一过程对参数准确性的依赖降到最低。DPCA技术主要依靠通道间信号相减后再进行阈值检测以消除杂波,但为了防止对动目标的漏检,不能过高地提升阈值,这也造成了一些强杂波无法消除;而ATI技术是依靠通道间相位差来检测出动目标。
1 原 理
以双通道为例,通道1发射和接收信号,通道2仅接收信号。如图1所示,x轴为方位向,y轴为距离向,雷达的方位向和距离向速度分别为[va]和[vr]。[t=0]时雷达位于坐标原点,此时目标点位于[(x0,y0)]。
对静止目标进行分析,对通道1和通道2的数据均使用通道1的参数进行距离多普勒(RD)算法处理后,可得到通道1和通道2信号的表达式:
[Sac1(τ,t)=σprτ-2yc1cpa(t-tc1)exp-j4πλyc1exp(j2πfc1t)] (1)
[Sac2(τ,t)=σprτ-2(yc2+d28yc1)cpa(t-tc2)· exp-j4πλ(yc2+d28yc1)exp(j2πfc2t)] (2)
式中:[tc1=x0va;yc1=y0-vrtc1;fc1=2vrλ;tc2=x0-d2va;][yc2=y0-vrtc2;fc2=2vrλ];[τ]代表快时间或者距离向时间;[t]表示慢时间或者方位向时间;[σ]是目标反射系数的复数常量;[tc1]是波束中心的偏离时间;[pr(τ)]是距离向包络,通常是一个sinc函数;[pa(t)]是方位向包络,通常也是一个sinc函数;[λ]是雷达系统的波长;[d]是基线长度。
图1 雷达与目标示意图
因为[(τ,t)]平面与[(x,y)]平面具有如下关系:
[x=vaty=c2τ] (3)
所以得知,静止目标在通道1的位置信息为[(x0,yc1)],同时,它还有一个常数相位[-4πλyc1]和一个线性相位[2πfc1t];静止目标在通道2的位置信息为[(x0-d2,yc2+d28yc1)],此外,它还有一个常数相位[-4πλ(yc2+d28yc1)]和一个线性相位[2πfc2t]。从而对静止目标,通道间位置差异与相位差异分别为:
[Δxs=x0-x0-d2=d2Δys=yc1-yc2+d28yc1=-vrd2va-d28yc1Δθs=-4πλyc1--4πλ(yc2+d28yc1)=πλ2vrdva+d22yc1] (4)
2 算 法
本算法的逻辑框图如图2所示。算法共分为5步:坐标配准、相位补偿、杂波对消/干涉、均值平滑和阈值检测。其中坐标配准和相位补偿是2种方法所共有的且为重点关注的步骤。
图2 算法流程图
2.1 坐标配准
坐标配准是通过对通道2信号的位置平移以消除同一静止目标在不同通道间的差异。理论上只需在通道2信号上平移两通道之间的位置差即可,但这一方法受到系数参数不够精确的影响,配准精度不高。在此,采用将其转化为一个最优化问题,即找到一个平移量,使得通道2图像平移后与通道1的差异最小。假设通道1的SAR幅度图像为[M×N]的实数矩阵[I1(i,j)],通道2的SAR幅度图像为[M×N]的实数矩阵[I2(i,j)],则两通道间的差异可用均方误差[e]来衡量:
[e=j=1Ni=1MI1(i,j)-I2(i,j)2] (5)
那么最优化问题可表述为:找到一个[(m0,n0)],其中[m0∈R,-M2≤m0≤M2,n0∈R,-N2≤m0≤N2,]使得[I2(i,j)]平移[(m0,n0)]后的[e]最小。
因为[m0]和[n0]是非整数,这就使得在时域上的处理变得困难起来,而帕斯瓦尔定理将此问题转化为频域处理提供了理论支持。根据帕斯瓦尔定理有:[j=1Ni=1MI1(i,j)-I2(i,j)2=1MNu=1Nv=1MX1(u,v)-X2(u,v)2] (6)
式中:[I1(i,j)2D-DFTX1(u,v);I2(i,j)2D-DFTX2(u,v)]
因此:
[e=1MNu=1Nv=1MX1(u,v)-X2(u,v)2] (7)
根据二维傅里叶变换,有:[I2(i,j)sinc(i-m0)sinc(j-n0)2D-DFT X2(u,v)·exp(-j2πuMm0)exp(-j2πvNn0)] (8)
即时域上的平移等同于频谱上乘以[exp(-j2πuMm0)exp(-j2πvNn0)]。因此在频域上要解决的问题是:找到一个[(m0,n0)],使得[X2(u,v)]乘以[exp(-j2πuMm0)exp(-j2πvNn0)]后,使得式(8)最小。
2.2 相位补偿
由于基线长度[d]远小于斜距[yc1],故 [d22yc1≈0],根据式(8),相位差[Δθs]约为:
[Δθs≈2πvrdλva] (9)
要补偿这个相位,可以直接让通道2的图像乘以[exp(-jΔθs)],但同样基线长度等参数的不准确性会导致补偿结果的不准确性,因此将问题转化为一个一维最优化问题。
设要补偿的相位为[θs],通道1的复数图像为[I1com(i,j)],通道2的复数图像为[I2com(i,j)],则相位补偿后两通道间的差异用均方误差[e(θs)]来衡量:
[e(θs)=j=1Ni=1MI1com(i,j)-I2com(i,j)exp(-jθs)2] (10)
则问题为:找到一个[θs],使得[e(θs)]最小。
2.3 杂波对消/干涉
对于DPCA来说,需要进行杂波对消,即用通道1信号与配准和补偿后的通道2信号相减,所得的差值在理论上可以消除静止杂波而保留运动目标杂波,但实际上由于配准与补偿的不完全性,并不能将静止杂波完全消除,一部分强静止杂波依然会保留影响运动目标的检测。对于ATI而言,取通道1信号与配准和补偿后的通道2信号的相位差进行检测。同样,由于配准与补偿的不完全性,并不能将静止杂波完全消除,一部分强静止杂波依然会保留影响运动目标的检测。
2.4 均值平滑
为进一步消除强杂波对于运动目标检测的干扰,需要对信号进行均值平滑。对2种方法而言,其平滑窗口的大小选择是不一样的。对于DPCA,选择[3×3]的小窗平滑效果较好;而对于ATI,窗口大小越接近于运动目标大小将能够更好地凸显运动目标并抑制强杂波。
2.5 阈值检测
对于两种方法,均使用阈值检测,计算其均值[μ]与方差[σ],则根据公式[threshold=μ+ασ]可设定检测阈值。理论上,[α]越大,则检测后残余的杂波越少;但实际上,为了保证动目标不被漏检,并不能过高地设定[α]的值,在此取[α=4]。
3 研究成果
使用电子所的一组双通道雷达数据来检测本文算法的可行性。图3为通道1的SAR信号成像,从图中可以看出目标1要稍弱一些不易检测。
图3 通道1SAR信号成像
图4为DPCA差值平滑后的图像。
图4 通道差平滑后图像
图5为DPCA阈值检测结果,图中可见2个运动目标,但同时一些强杂波也被保留下来。
图5 DPCA检测结果
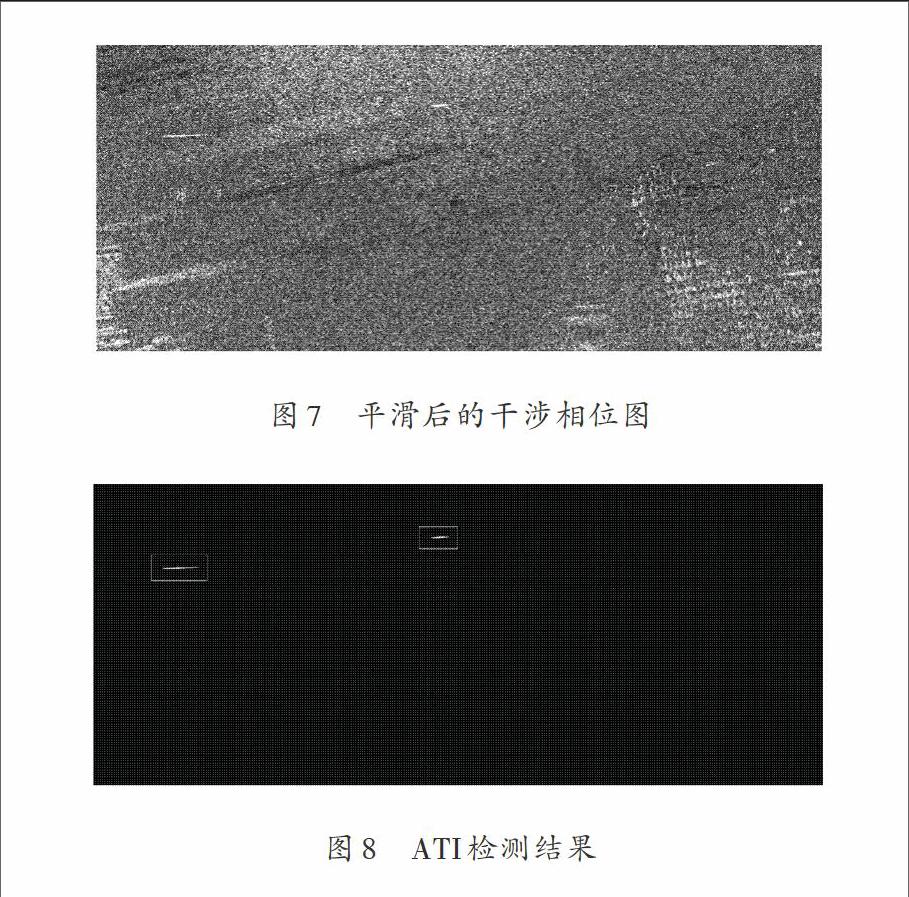
图6和图7是干涉相位图和平滑后的干涉相位图,对比发现,平滑后动目标被凸显出来更易检测,图8为ATI检测结果,2个目标均被检测出来且无杂波残留,证明该算法检测效果较好。
图6 干涉相位图
图7 平滑后的干涉相位图
图8 ATI检测结果
4 结 语
本文针对地面运动目标检测提出了创新的DPCA和ATI技术。两种方法均能够有效地检测出运动目标,即使运动目标相比于杂波来说强度非常弱的情况下,检测效果依然良好。对于两个方法的最终成果,发现ATI在运动目标检测方面更胜一筹。
参考文献
[1] CERUTTI?MAORI D, SIKANETA I. A generalization of DPCA processing for multichannel SAR/GMTI radars [J]. IEEE Transactions on Geoscience and Remote Sensing Society, 2013, 51(1): 560?572.
[2] WEBER P, PREMJI A, NOHARA T J, et al. SAR?GMTI processing with canadas radarsat 2 satellite [C]// Proceedings of 2000 IEEE Adaptive Systems for Signal Processing, Communications, and Control Symposium. Lake Louise, Alta: IEEE, 2000: 379?384.
[3] BOERNER W M, YAMAGUCHI Y. Extra wideband polarimetry, interferometry and polarimetric interferometry in synthetic aperture remote sensing [J]. IEICE Transactions on Community, 2000, 83(9): 1906? 1915.
[4] WANG J, LIU X. Automatic correction of range migration in SAR imaging [J]. IEEE Geoscience and Remote Sensing Society, 2010, 7(2): 256?260.
[5] WANG J, LIU X. SAR minimum?entropy autofocus using an adaptive?order polynomial model [J]. IEEE Geoscience and Remote Sensing Society, 2006, 3(4): 512?516.
[6] SUO Z, LI Z, BAO Z. Multi?channel SAR?GMTI method robust to coregistration error of SAR images [J]. IEEE Geoscience and Remote Sensing Society, 2010, 46(4): 2035?2043.
[7] 胡克彬,张晓玲,师君,等.基于图像强度最优的SAR高精度运动补偿方法[J].雷达学报,2015(1):60?69.
[8] 金玉荣,孙造宇,梁甸农.星载SAR 地面场景RCS仿真[J].现代电子技术,2007,30(7):15?18.
[9] LI F K, GOLDSTEIN R M. Studies of multibaseline spaceborne interferometric synthetic aperture radars [J]. IEEE Geoscience and Remote Sensing Society. 1990, 28(1): 88?97.
[10] WANG J, LIU X. Velocity estimation of moving targets using SAR [C]// Proceedings of 2011 IEEE International Geoscience and Remote Sensing Symposium. Vancouver, BC: IEEE, 2011: 340–343.
[11] CERUTTI?MAORI D, SIKANETA I. A generalization of DPCA processing for multi?channel SAR/GMTI radars [J]. IEEE Geoscience and Remote Sensing Society, 2013, 51(1): 560?572.
[12] LI G, XIAO X G, XU J, et al. A velocity estimation algorithm of moving targets using single antenna SAR [J]. IEEE Geoscience and Remote Sensing Society, 2009, 47(3): 1052?1062.
[13] ZHU S, LIAO G, QU Y, et al. A new slant?range velocity ambiguity resolving approach of fast moving targets for SAR system [J]. IEEE Geoscience and Remote Sensing Society, 2010, 48(1): 432?451.
[14] ANUTA P E. Spatial registration of multispectral and multitemporal digital imagery using fast Fourier transform techniques [J]. IEEE Geoscience and Remote Sensing Society, 1970, 8(4): 353?368.
猜你喜欢
科学与信息化(2021年30期)2021-12-24
山东冶金(2019年5期)2019-11-16
制造技术与机床(2019年9期)2019-09-10
西南交通大学学报(2018年6期)2018-12-18
河北遥感(2017年2期)2017-08-07
人生十六七(2016年14期)2016-12-01
衡阳师范学院学报(2016年3期)2016-07-10
西北工业大学学报(2015年3期)2015-12-14
遥测遥控(2015年2期)2015-04-23
现代农业(2015年1期)2015-02-28
