
立方体卫星太阳翼技术综述
2015-10-28 02:18任守志刘颖王举黄传平刘少锋马静雅周志清
航天器工程 2015年2期
任守志 刘颖 王举 黄传平 刘少锋 马静雅 周志清
(北京空间飞行器总体设计部,北京 100094)
立方体卫星太阳翼技术综述
任守志 刘颖 王举 黄传平 刘少锋 马静雅 周志清
(北京空间飞行器总体设计部,北京 100094)
调研了国外不同类型立方体卫星(CubeSat)的太阳翼技术,并从展开维度及展开次数的角度进行了分类,然后对CubeSat太阳翼的太阳电池板、压紧释放机构及展开机构等典型部件进行详细介绍,对不同类型的部件技术进行了对比,通过对比,给出了CubeSat太阳翼在研制体系建设、部件技术、搭载验证等方面的发展建议,可为后续研究提供参考。
立方体卫星;展开式;太阳翼
1 引言
立方体卫星(CubeSat)根据尺寸分类属于皮卫星(pico-satellites),其概念最早于1999年由美国加州理工学院和斯坦福大学提出。这种卫星体积小、质量轻、成本低、研发时间短,截至目前已有超过150颗CubeSat成功发射。经过近些年的发展,卫星外形尺寸已经标准化,根据其尺寸不同,可以分为1U,2U,3U等(其中1U即10 cm×10 cm×10 cm,2U即10 cm×10 cm×20 cm,3U即10 cm×10 cm× 30 cm)。这种卫星通常由来自大学的学生研制,但由于其制造成本低,具有快速响应的特点,一次可发射几个甚至几十个,目前已逐渐受到专业航天研究人员的重视[1-5]。
早期CubeSat由于其尺寸限制,无法使用目前广泛应用于大卫星上的太阳翼(即展开式太阳电池阵),因此最初大部分CubeSat采用体装式太阳电池阵,其功率仅5~10 W,随着有效载荷的增加,其功率需求也不断增加,达到几十瓦,体装式电池阵已无法满足其要求,要求CubeSat在有限的包络体积内实现更大的展开面积,因此出现了类似大卫星上应用的太阳翼。但是由于尺寸限制,其太阳翼技术不同于大卫星上的太阳翼。本文调研了国外典型CubeSat太阳翼,对其进行了分类,并对太阳电池板、压紧释放机构及展开机构等典型部件技术进行了归纳和总结。
2 国外典型CubeSat太阳翼介绍
2.1 CubeSat太阳翼分类及特点
1)分类
类似传统大卫星所用太阳翼,CubeSat太阳翼按展开方式也可分为一维一次展开式和多维多次展开式。按组成可分为单板式和多板式。
2)特点
传统刚性太阳翼组成部件中太阳电池板、展开锁定机构及压紧释放机构等尺寸较大,且压紧释放装置释放时会产生较大的冲击,因此传统太阳翼相关技术无法直接用在对包络和冲击要求较高的CubeSat太阳翼上。
根据CubeSat设计规范[6],太阳翼收拢状态厚度要小于6.5 mm,因此太阳电池板、展开机构、压紧释放机构必须进行小型化设计,但由于机构设计限制以及CubeSat的特点,又不能简单地对传统刚性太阳翼按比例缩小设计,必须在低包络尺寸、低质量、较大展开面积的情况下进行全新的设计。
为减小质量以及收拢状态下的包络尺寸,CubeSat太阳电池板的基板材料采用碳纤维复合材料层压板或专门能够适应空间环境的印刷电路板(PCB),而不再采用传统刚性太阳翼基板采用的蜂窝夹层板。
CubeSat太阳翼一般无对日定向功能,因此为了尽可能增大光照面积,太阳电池板两侧一般均粘贴电池片。
由于有刚度的要求,传统太阳翼展开机构一般具有锁定设计。但受到尺寸限制,CubeSat太阳翼展开机构一般无锁定设计,太阳翼展开后仅靠铰链中的扭簧预紧力压紧在展开位置上,并不锁定。
传统刚性太阳翼所用的压紧释放机构一般采用火工装置,尺寸大、质量大,冲击大,不适用于Cube-Sat太阳翼,因此CubeSat太阳翼一般采用冲击很低的熔线式压紧释放机构。
下文对国外典型CubeSat太阳翼进行介绍。
2.2 一维一次展开式太阳电池阵
与大型卫星太阳翼发展历程类似,首先出现的是一维一次展开太阳电池阵,即这种太阳翼一般只有一块太阳电池板。
1)CAPE-2卫星太阳翼
Cajun先进皮卫星试验(Cajun Advanced Picosatellite Experiment,CAPE-2)卫星是第一个使用太阳翼的1U皮卫星,为尽可能多获得太阳能,除了在卫星本体的每个面上粘贴太阳电池片外,它还采用了4个太阳翼,见图1(a)[7],每个太阳翼正反两面分别粘贴了2块电池片。每个太阳翼由一个根部铰链、一块太阳电池板及采用熔线式的压紧释放机构组成,太阳翼铰链上设计有周向限位块,见图1(b)[7],太阳翼展开135°后被根铰上的扭簧压紧在限位块位置上,无法继续展开,太阳翼在星体上收拢和展开状态如图2所示。

图1 CAPE-2太阳翼Fig.1 Solar wing of CAPE-2
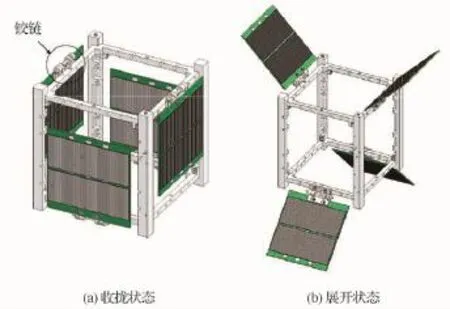
图2 太阳翼在星体上收拢和展开状态Fig.2 Stowed and deployed configuration of solar wing on satellite
2)Delfi-C3太阳翼
德尔斐-C3(Delfi-C3)卫星是荷兰德尔斐大学的学生研制的3U规格的CubeSat,于2008年4月发射[8]。其卫星结构采用了Pumpkin公司研制的卫星平台[9];使用了单板展开式太阳电池阵,部分太阳电池还使用了Dutch Space公司的薄膜太阳电池片,太阳翼在星体上状态如图3所示,薄膜太阳电池构造如图4所示[10]。
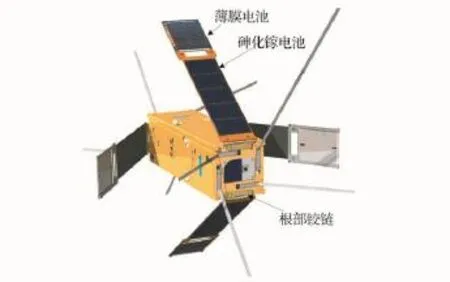
图3 Delfi-C3卫星及4个太阳翼Fig.3 Delfi-C3 satellite and its 4 solar wings

图4 Delfi-C3卫星薄膜太阳电池构造Fig.4 Constitution of film solar cell on Delfi-C3 satellite
单个Delfi-C3太阳翼由两部分组成,下半部分粘贴了三结砷化镓电池片,上半部分粘贴了薄膜太阳电池,其中薄膜电池是首次在轨应用,采用了厚度仅为25μm的钛作为基板,这种薄膜电池具有很高的功率质量比及很小的包络尺寸。
太阳翼依靠与卫星本体相连的根部铰链展开,每个太阳翼展开35°后被限制在指定位置上。
3)商用现货产品
目前国外部分公司已经提供针对CubeSat系列的商用现货太阳翼,如CLYDE SPACE公司研制的针对1U~3U规格CubeSat使用的太阳翼,如图5所示,可根据功率需求采用单面或双面粘贴电池片的太阳电池板[11]。
另外Pumpkin公司针对CubeSat可提供微小成像航天器(MISC)平台的一维展开式太阳翼,典型应用为Qbx-1,构型如图6所示[2]。这种太阳翼基板采用1.6 mm厚的PCB,收拢状态下沿厚度方向的包络尺寸小于6.5 mm。

图5 CLYDE SPACE公司研制的一维展开太阳翼Fig.5 One-dimensional solar wing of CLYDE SPACE
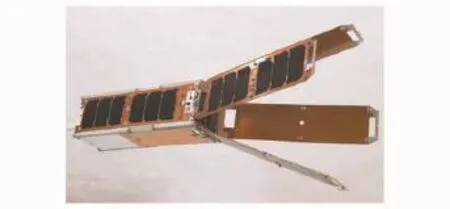
图6 立方体试验-1卫星(采用MISC平台太阳翼)Fig.6 Qbx-1 satellite(using MISC platform solar wing)
2.3 多维多次展开太阳翼
1)自动展开式太阳电池阵系统(ADSPA)太阳翼
为满足NASA和美国国防部(DOD)CubeSat项目对功率的更高需求,美国空间信息实验室(Space Information Laboratories,SIL)研制了自动展开式太阳电池阵系统,这种太阳翼适用于3U规格CubeSat,其在寿命初期的峰值功率可达50 W,其基板材料选用PCB,正反两面均粘贴了效率达28.3%的三结砷化镓电池片。图7是几种不同构型的ADSPA太阳翼[12]。
在发射状态,太阳翼由熔线式压紧释放机构压紧,入轨后压紧释放机构中的电阻丝加热熔断预紧绳索,从而解除其约束,之后太阳电池板在展开机构中扭簧的驱动下展开到位。其中铰链上采用了有机硅控制其展开速度,并在展开终了位置设有限位块。铰链结构如图8所示。[12]

图7 几种不同二维太阳翼构型Fig.7 Different two-dimensional solar wing configurations

图8 太阳翼所用的铰链Fig.8 Hinges used on the solar wing
2)PowerCube Sun Mill太阳翼
采用多维展开方式且适用于CubeSat的太阳翼,还有Tethers Unlimited公司研制的PowerCube Sun-Mill太阳翼[13]。单个太阳翼由3块电池板组成,收拢状态下3块电池板叠合在一起,展开后并排在一起,图9显示了4个太阳翼在星体上展开后的状态[13]。这种太阳翼峰值功率达80 W,平均功率达49 W。

图9 PowerCube Sun Mill太阳翼Fig.9 PowerCube Sun Mill solar wing
3)HaWK太阳翼
美国MMA公司也研制了可适用于CubeSat的多次展开式太阳翼,称为HaWK太阳翼,如图10所示[14]。它展开构型为3块板并联构型,中心的太阳电池板与驱动机构相连,可对日定向,其峰值功率可达36 W,收拢状态厚度小于6.5 mm。
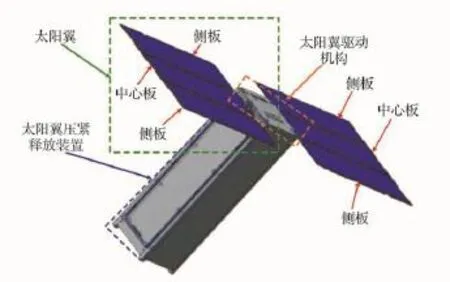
图10 MMA公司的HaWK太阳翼Fig.10 HaWK solar wing of MMA company
HaWK太阳翼压紧释放装置解除对太阳翼的约束后,叠在一起的3块板在中心板铰链的驱动下展开,当中心板展开90°后,两侧板再展开,过程如图11所示[14]。其中为减小质量,太阳翼基板结构采用了框架式结构,如图12所示。

图12 基板结构Fig.12 Structure of substrate
3 CubeSat太阳翼部件技术
CubeSat太阳翼尺寸、类型、展开方式多种多样,但其太阳电池板、展开机构、压紧释放机构等组成部件技术相对统一,因此有必要对其部件技术进行归纳、整理。
3.1 太阳电池板
由于受到尺寸限制,CubeSat太阳电池板一般采用厚度较薄的PCB或者碳纤维复合材料板。采用PCB的好处是成本较低,可简化电路设计,电池片可以直接连接在电池板上,而不须粘贴绝缘膜,可简化电池片之间的连接设计;另外,PCB密度较低,可以节省质量。其缺点是存在真空放气,易受紫外、原子氧、高能粒子辐射的影响。
目前,大部分CubeSat太阳翼基板都采用PCB作为基板结构,典型的PCB结构如图13所示。[15-16]

图13 采用PCB作为基板的太阳电池板Fig.13 Solar cell panel using PCB as substrate
除了采用PCB作为基板外,部分CubeSat太阳翼的基板结构采用了碳纤维复合材料板或碳纤维复合材料框架,其优点是刚度较高,但价格也高,使用时需要在其表面粘贴绝缘膜,如MMA公司的HaWK太阳翼基板(见图12)[14]。
3.2 压紧释放装置
传统的火工压紧释放装置尺寸大、质量大、解锁时产生较高的冲击,均不适用于CubeSat太阳翼,因此CubeSat太阳翼所用压紧释放装置具有尺寸小、质量轻、解锁冲击小的特点。下文介绍几种用于CubeSat太阳翼的压紧释放装置。
1)熔线式压紧释放装置[17]
美国海军研究实验室开发了一种适用于Cube-Sat太阳翼的熔线式压紧释放装置,这种装置中的电阻丝采用镍铬合金(NiChrome),压紧绳索采用高耐磨性、低蠕变特性的Vectran纤维编织而成。
整套压紧释放装置构型布局如图14所示[17]。产品尺寸为32 mm×16.5 mm×11.5 mm,压紧释放装置中电阻丝与两个导杆连接,导杆与固定架通过两个受压缩的弹簧预紧,并提供一定的行程。电阻中的电流控制在1.6±0.05 A,较小的公差范围有两个目的:一是能够可靠熔断绳索;二是防止电阻丝过热,导致电阻丝损坏而无法重复利用。这种压紧释放装置能够在2.4~7.2 s内熔断绳索,且已经在绳索电推进立方体卫星试验项目(Tether Electrodynamic Propulsion CubeSat Experiment,TEPCE)上完成在轨验证,电阻丝的电阻为0.4~0.9Ω,工作时电阻丝加热后发红,熔断绳索,如图15所示[17]。
文献[21]采用了原理相同、构造形式不同的压紧释放装置,如图16所示[18]。压紧绳索采用了大力马(Dyneema)线,Dyneema线的熔化温度相比Vectran纤维低,这种装置已经应用在了日本东京工业大学立方体工程试验卫星-1(CUTE-1)的天线上。

图14 熔线式压紧释放装置Fig.14 Burn wire hold-down and release device
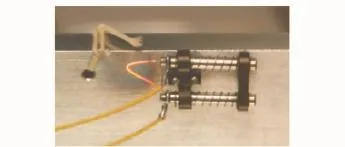
图15 加热电阻丝Fig.15 Heated wire
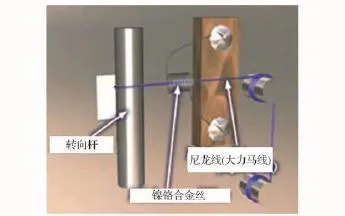
图16 熔线式压紧释放装置原理图Fig.16 Principle of burn wire hold-down and release device
2)利用不同热膨胀系数原理的压紧释放装置[19]
美国约翰霍普金斯大学研制了一种用于Cube-Sat的可重复使用压紧释放装置,其原理是在压紧释放装置中使用两种不同温度系数的材料,其中温度系数大的零件中设计有孔,而温度系数低的零件设计成销的形式。当零件受热时,把销插入,当温度降低时孔尺寸减小,与销接触,并产生温度应力,从而限制了销子在孔内的运动。
这种压紧释放装置组成及原理如图17所示[19],收拢前,与星体相连的限位块被加热,导致与锥块相配合的孔尺寸增大,这样锥块可顺利进入限位块的孔内,当限位块温度下降后,配合孔的尺寸减小,从而与锥块之间形成过盈配合,在两者之间摩擦力的作用下,锥块无法从限位块中脱出,当需要释放时,重新对限位块进行加热,配合孔尺寸变大,被约束的锥块被弹簧顶出。
这种压紧释放装置中孔和销子的间隙是关键设计要素。压紧释放装置的外圈采用铝合金,而内圈采用钛合金,两者之间装配前的间隙为3.81μm。在收拢状态,压紧释放装置提供的压紧力全部来自锥块与限位块之间的摩擦力。由于工作过程中依靠温度变化来控制锥和孔之间的压紧力,因此这种压紧释放装置几乎没有解锁冲击,但由于使用摩擦力作为压紧力,因此存在无法解锁和提前释放的风险。
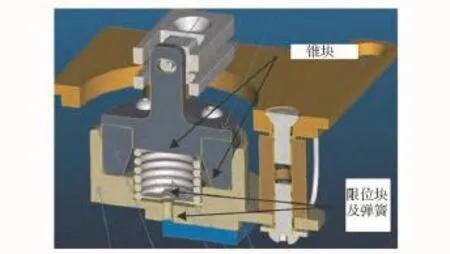
图17 压紧释放机构组成图Fig.17 Constitution of the hold-down and release device
3)采用电机驱动的压紧释放装置
文献[18]提出了一种适用于CubeSat太阳翼的电机驱动压紧释放装置,太阳翼在收拢状态通过限位装置实现压紧。日本东京工业大学研制的CUTE-1太阳翼采用了这种压紧释放装置,其释放顺序如图18所示[20]。

图18 CUTE-1太阳翼释放顺序Fig.18 Release sequence of solar wing of CUTE-1 mission
太阳翼收拢时,与太阳电池板连接的活塞被压紧释放装置上的滑轨限制,当在电机的驱动下,滑轨转过一定的角度后,活塞脱离与滑轨的接触后,太阳电池板在驱动机构的作用下展开。但这种压紧释放装置使用了电机及行星齿轮,因此占用的体积较大。压紧释放装置在星体上安装位置如图19所示,太阳翼释放及其展开过程如图20所示。

图19 电机驱动压紧释放机构在星体上安装状态Fig.19 Motor-driven release mechanism on the Cubesat
4)小结
根据上述介绍,各种压紧释放装置的特点可归纳见表1,具体设计时可根据使用特点选用。
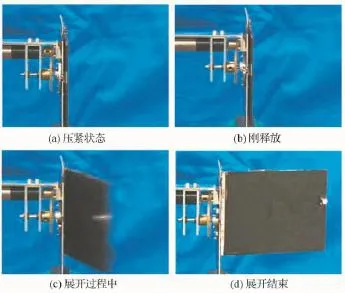
图20 太阳翼展开过程Fig.20 Deployment sequence of the solar wing

表1 各种压紧释放装置比较Table 1 Comparison of different hold-down and release devices
3.3 展开机构
由于尺寸限制,CubeSat太阳翼展开机构一般不采用大卫星太阳翼展开锁定机构中的锁定设计,仅依靠铰链中的扭簧把太阳翼限制在展开位置上。目前CubeSat太阳翼大部分采用铰链式展开机构,少部分采用其他形式的展开机构。
1)铰链式展开机构
由于受到CubeSat尺寸限制,铰链式展开机构尺寸也较小。这种铰链组成简单,一般由公铰、母铰、扭簧和销轴组成,与1欧元硬币尺寸对比如图21所示。为简化设计,一般采用限位块设计,太阳翼展开到位后通过弹簧压紧在限位块上,根据太阳翼展开角度的不同,可把限位块设计在不同位置,铰链展开过程及限位块工作原理如图22所示。
2)带簧式展开机构
由于带簧厚度较薄,收拢后尺寸较小,比较适合用于CubeSat太阳翼的展开机构。如慕尼黑理工大学研制的慕尼黑轨道验证试验(MOVE)CubeSat的太阳翼使用了4根交叉的带簧作为展开机构的驱动动力,如图23所示。[20]

图21 铰链组成示意图Fig.21 Constitution of the hinge
带簧铰链的特点是可恢复应变量大、形状保持能力好、具有较高阻尼。还具有低成本、无摩擦、无需润滑、质量轻、结构简单、工作可靠、展开后刚度大且无间隙等优点。
3)剪刀式展开机构
文献[21]提出了一种可适用于3U规格的CubeSat,它采用剪刀式展开机构的太阳翼,可提供的平均功率达23 W。太阳翼在星体上收拢和展开状态如图24所示。

图22 铰链展开过程及限位位置Fig.22 Deployment sequence of the hinge and the stopping position

图23 MOVE卫星的太阳翼Fig.23 Solar wing of MOVE
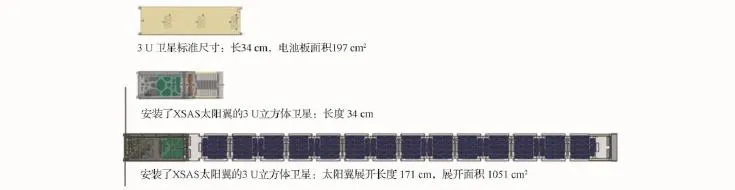
图24 采用剪刀式展开机构的太阳翼在星体上收拢和展开状态Fig.24 Stowed and deployed configuration of a solar wing using scissor deployment mechanism on a 3U CubeSat
太阳翼由太阳电池板、剪刀式展开机构、阻尼器、压紧释放装置、铰链及锁定装置、压板等组成,如图25所示。

图25 太阳翼各组成部分Fig.25 Constitution of the solar wing
每个铰链线均可以展开并锁定,其原理是在公铰上设计有两个齿形突起。锁定前,公铰上的齿在母铰链上滑动,当到达锁定位置后,齿形突起落入母铰上的两个槽内,从而完成锁定,如图26所示。
剪刀式展开机构与太阳电池板侧边相连,它把太阳翼展开运动由多自由度简化为单自由度,这样可以控制太阳翼各电池板展开过程中的方位,防止各板无序展开。另外,太阳翼根部铰链上设计有旋转阻尼器(见图25),用于控制太阳翼展开速度。
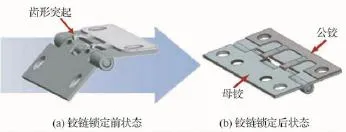
图26 铰链展开锁定过程Fig.26 Deployment and locking process of the hinge
由于剪刀式展开机构需要一定的厚度,因此这种机构收拢状态需要较大的体积,另外,这种机构活动部件较多,组成复杂,可靠性相对较低。
剪刀式展开机构可以把多板展开过程简化为单个自由度,因此若采用电机作为其驱动动力,展开机构可以设计为可展收太阳翼。
4)电机驱动展开机构
文献[20]提出了一种采用超小型无刷直流步进电机和铰链配合使用的展开机构,如图27和图28所示。电机配合行星齿轮,指向精度达0.6°,但是由于电机需要占用一定的体积,因此在星体上安装时,电机需要部分沉入星体中。
由于采用电机,太阳翼可以根据需要展开到指定的角度,且可重复展开和收拢。

图27 电机在铰链安装位置Fig.27 Motor on the hinge of the solar wing

图28 电机安装在太阳翼上Fig.28 Motor on the solar wing
5)小结
根据上述介绍,CubeSat太阳翼各类展开机构的特点可归纳见表2。

表2 不同展开机构比较Table 2 Comparison of different deployment mechanism
4 启示与建议
CubeSat系列微小卫星逐渐成为国内外研究热点,且随着有效载荷技术的发展,对功率的需求也越来越大,国外已针对这种需求研制了多种太阳翼,且已完成飞行验证,而国内目前针对CubeSat系列微小卫星的研究尚处于起步阶段,对太阳翼的研究尚属空白。针对国内在微小卫星太阳翼技术上落后于国外的现实,建议国内加强微小卫星太阳翼技术的研究,可从以下几个方面实施:
(1)原有面向大、中型卫星研制的技术体系、产品体系,已无法满足微小卫星研制成本低、周期短及响应快速的要求,亟须建立适应微小卫星太阳翼产品的研制模式,加强微小卫星太阳翼在标准化、模块化、组合化方面的设计,实现“较快、较好、较省”的研制目标。
(2)针对国内面向微小卫星轻量化、小型化产品和技术积累较少的问题,迫切需要梳理不同量级微小卫星对太阳翼的需求,借鉴国外微小卫星太阳翼技术,结合国内技术现状,研制适用于不同量级微小卫星太阳翼的太阳电池板、展开机构,特别是熔线式超轻型压紧释放装置等通用部件产品。
(3)充分利用国内航天搭载项目、技术试验验证卫星的时机,完成微小卫星太阳翼及其关键技术的在轨试验验证,为正式在轨应用奠定基础。
(
)
[1]Skyrocket.Gunter's space page[EB/OL].[2014-12-20].http://space.skyrocket.de/doc_sat/CubeSat.htm
[2]Pumkin,Inc.Begin your CubeSat Mission with the CubeSat KitTM[EB/OL].[2014-12-20].http://www.CubeSatkit.com/index.html
[3]Teikaei.The CubeSat built by students of US primary school to launch in 2014[EB/OL].[2014-12-20].http://www.cnbeta.com/articles/234733.htm
[4]California Ploytechnic State University.CubeSat design specification Rev.13[EB/OL].[2014-12-20].http://www.CubeSat.org/images/developers/cds_rev13.pdf
[5]Alexander Elbrecht,Sascha Dech,Achim Gottscheber.1U CubeSat design for increased power generation[C]//1st IAA Confernce on University Satellite Missions and CubeSat Workshop.Stockholm,Sweden:IAA,2012
[6]California Polytechnic State University.CubeSat Design Specification Rev.13[EB/OL].[2014-12-20].http://CubeSat.atl.calpoly.edu/media/CDS rev13.pdf
[7]Abhishek Bajpayee.Mechanical Design of CAPE2-the second CubeSat being designed under the Cajun Advanced Picosatellite Experiment[C]//7th Annual Cube-Sat Developers'Workshop.San Luis Obispo:California Polytechnic State University,2010
[8]Wikipedia.Delfi-C3[EB/OL].[2014-12-20].http://en.wikipedia.org/wiki/Delfi-C3
[9]G F Brouwer,J Bouwmeester.From the Delfi-C3 nanosatellite towards the Delfi-n3Xt nano-satellite[C]//23rd Annual AIAA/USU Conference on Small Satellites.Washington D.C.:AIAA,2009
[10]Wouter Jan Ubbels MSc.Delfi-C3-Student nanosatellite as a test bed for new space technoloty[C]//20th Annual AIAA/USU Conference on Small Satellites.Washington D.C.:AIAA,2006
[11]CLYDE.CLYDE space[EB/OL].[2014-12-20].http://www.clyde-space.com
[12]Edmund Burk.Matt Barsotti.High-power deployable solar panel arrays for nanosats and microsats[C]//AIAA Responsive Space Conference 2011.Washington D.C.:AIAA,2011
[13]Tethers Unlimited.Products introduction[EB/OL].[2014-12-21].http://www.tethers.com/Products.html
[14]MMA.Innovative High specific performance(HaWK)solar array[EB/OL].[2014-12-20].http://www.mmadesignllc.com
[15]Alexander L Carrere.Solar panel design decision and general information sheet[EB/OL].[2014-12-20].http://browncubesat.org/wp-content/uploads/2013/01/Solar-Panel-Documentation.pdf
[16]Colorado Satellite Services,LLC.CSS bus for rampart(rapid prototyped microelectro mechanical system propulsion and radiation test CUBE flow satellite)-The evolution of PCBSat for the RAMPART CubeSat[C]//7th Annual CubeSat Developers'Workshop.San Luis Obispo:Cal Poly Campus,2010
[17]Adam Thurn,Steve Huynh.A nichrome burn wire release mechanism for CubeSats[C]//Proceedings of the 41st Aerospace Mechanisms Symposium.Pasadena,CA:NASA JPL,2012
[18]Koji Nakaya,Kazuya Konoue.Tokyo tech CubeSat: CUTE-I-design&development of flight model and future plan[J].Washington D.C.:AIAA,2011
[19]Clint Apland,David Persons.A novel release mechanism employing the principle of differential coefficients of thermal expansion[C]//Proceedings of the 41st Aerospace Mechanisms Symposium.Pasadena,CA: NASA JPL,2012
[20]Patrick Höhn.Design,construction and validation of an articulated solar panel for CubeSats[D].Lulea: Lulea University of Technology,2010
[21]Patrick Senatore,Andrew Klesh.Concept,design,and prototyping of XSAS:A high power extendable solar array for CubeSat applications[C]//Proceedings of the 40th Aerospace Mechanisms Symposium.Washington D.C.:NASA Kennedy Space Center,2010
(编辑:李多)
Overview of Solar Wing for CubeSat
REN Shouzhi LIU Ying WANG Ju HUANG Chuanping LIU Shaofeng MA Jingya ZHOU Zhiqing
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
This paper investigates different kinds of solar wing on CubeSats,makes a classification of them in the view of dimension and times of deployment.It presents a detailed introduction of their typical components—solar panel,hold-down and release mechanism and deployment mechanism.The paper also compares different types of the components and gives specific advice to concerned researchers on development system,parts design and flight test of the CubeSat solar wings.The results can be as a reference for the future research.
CubeSat;deployable;solar wing
V443
A DOI:10.3969/j.issn.1673-8748.2015.02.018
2014-12-18;
2015-03-06
任守志,男,工程师,从事航天器机构设计与分析研究工作。Email:renshouzhi@163.com。
猜你喜欢
电子产品可靠性与环境试验(2022年2期)2022-05-14
北京航空航天大学学报(2021年7期)2021-08-13
陶瓷学报(2020年3期)2020-10-27
上海航天(2020年3期)2020-07-01
科学导报(2019年55期)2019-09-28
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
安徽化工(2018年6期)2019-01-11
汽车电器(2018年10期)2018-11-01
装备环境工程(2018年7期)2018-08-01
