非线性轮胎侧向力对汽车转向稳定性的影响
2015-10-28 09:46沈法鹏赵又群赵洪光刘英杰
中国机械工程 2015年1期
沈法鹏 赵又群 赵洪光 刘英杰
1.南京航空航天大学,南京,210016 2.山东交通职业学院,潍坊,261206
非线性轮胎侧向力对汽车转向稳定性的影响
沈法鹏1,2赵又群1赵洪光2刘英杰1
1.南京航空航天大学,南京,2100162.山东交通职业学院,潍坊,261206
为分析轮胎侧向力对汽车转向稳定性的影响,建立了非线性轮胎侧向力模型并通过四自由度整车动力学模型计算了不同车速下汽车质心侧偏角、车身侧倾角和前轮转角响应。基于ADAMS的虚拟试验和实车试验结果表明:汽车高速转向行驶时,非线性轮胎侧向力模型能更准确地反映出汽车运动状态的响应,各状态响应的平均绝对误差能控制在相应状态幅值的10%以内。研究结果对汽车稳定性控制系统的设计具有理论指导意义。
转向稳定性;轮胎侧向力;非线性;运动状态
0 引言
汽车行驶过程中,轮胎处于非线性状态,但在汽车转向稳定性分析的实际过程中,由于非线性模型计算量大,故常把非线性问题进行线性化处理[1-2]。轮胎非线性特性一直是学者们研究的热点。文献[3]应用考虑轮胎非线性特性的车辆模型设计了质心侧偏角观测器;文献[4]研究了高速转弯工况侧倾载荷转移及轮胎的非线性特性对整车操纵稳定性的影响;文献[5]基于轮胎非线性侧偏特性模型研究了汽车的操纵动力学问题;文献[6]在设计汽车状态的非线性观测器时考虑了轮胎侧向力非线性特性。
在转向过程中,汽车运动状态参数(如质心侧偏角、车身侧倾角等)会发生变化,而这些状态量是汽车稳定性控制系统中的重要控制变量。汽车高速转向行驶时轮胎力学特性处于强非线性状态,此时若将问题进行线性化处理会失去实际意义[7-9]。为分析转向盘力输入下轮胎侧向力对汽车高速转向稳定性的影响,本文建立了包括侧向运动、横摆运动、侧倾运动和转向系统转动的四自由度整车模型和非线性轮胎侧向力模型,并通过ADAMS和实车试验进行了验证。
1 整车动力学模型
针对转向盘力输入工况下的整车模型,本文作如下假设:①以小转角行驶,忽略内外车轮转角差别;②悬架特性在线性范围内;③不计空气阻力。取固定于汽车上的相对坐标系统,以静止时的重心铅垂线与前后侧倾中心连线的交点为坐标原点,以汽车纵向水平轴为X轴,方向向前,Y轴过原点垂直于X轴,且在水平面内以汽车左侧方向为正,Z轴过原点垂直于XY平面,坐标系符合右手定则,具体如图1所示。图中,vX为汽车质心纵向速度;vY为汽车质心侧向速度;aY为汽车质心加速度在Y轴上的投影。转向系统简图如图2所示。

(a)俯视图
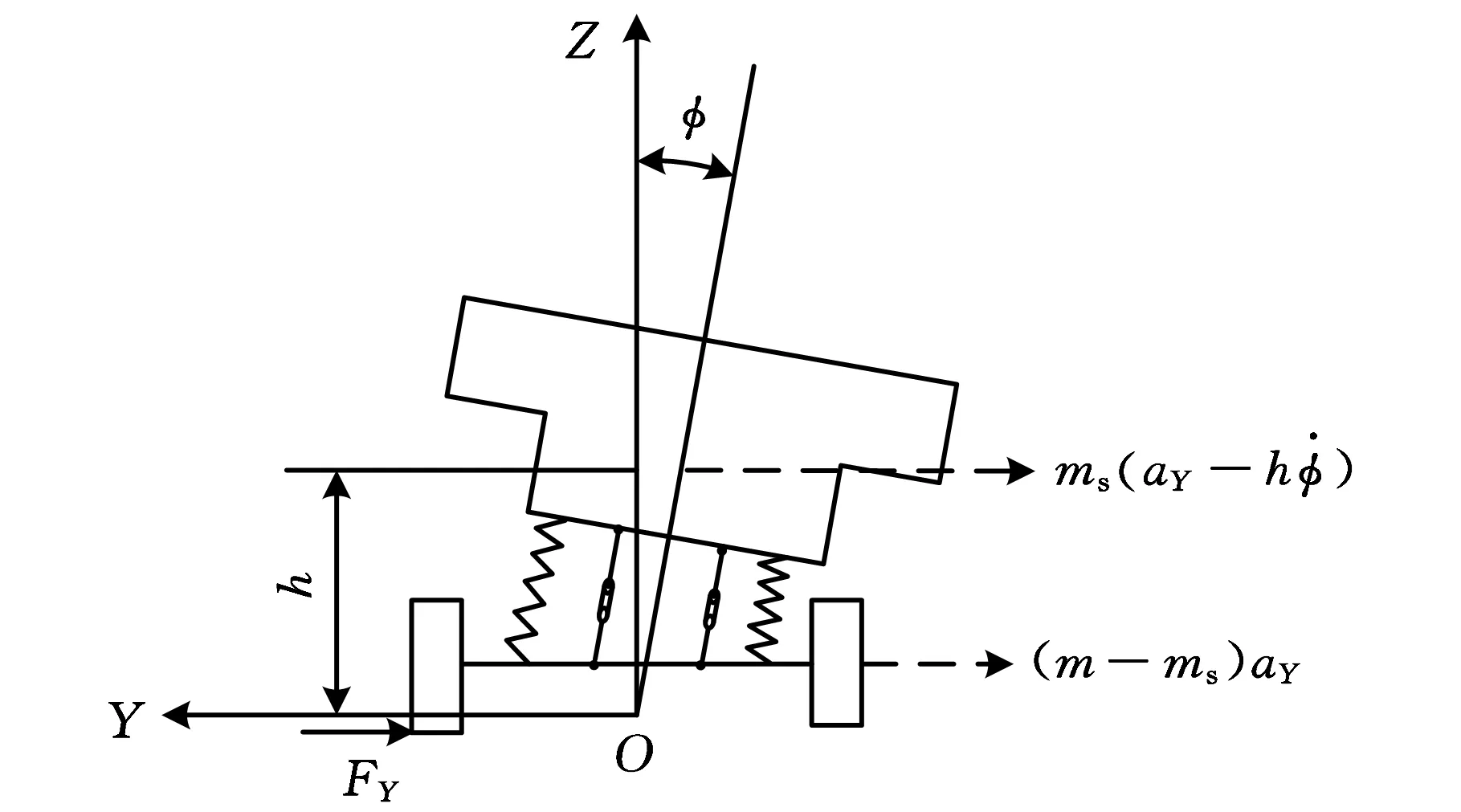
(b)后视图图1 汽车运动模型坐标图
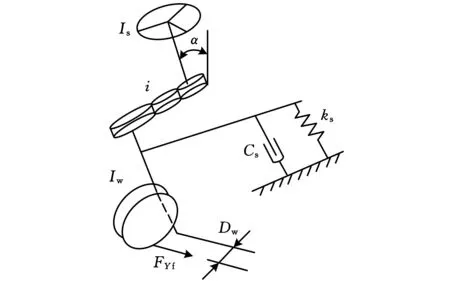
图2 转向系统示意图
根据达朗贝尔原理,列出车辆系统各平衡方程[10]。绕X轴的力矩平衡方程为

(1)
沿Y轴方向力平衡方程为

(2)
绕Z轴力矩平衡方程为

(3)
绕主销力矩平衡方程为

(4)
Nω=-2(a2Kf+b2Kr)/v
Nβ=-2(aKf-bKr)
Nφ=2(aKfEf-bKrEr)
Nδ=2aKf
Yω=-2(aKf-bKr)/v
Yβ=-2(Kf+Kr)
Yφ=2(KfEf+KrEr)
Yδ=2Kf
Lφ=-(Cf+Cr-msgh)
式中,IZ为整车绕Z轴的转动惯量;IX为悬架上质量绕X轴的转动惯量;IXZ为悬架上质量绕X、Z轴的惯性积;m为整车质量;ms为悬架上质量;v为汽车行驶速度;ω为汽车质心横摆角速度;φ为汽车车身侧倾角;β为汽车质心侧偏角;δ为汽车前轮转角;βf、βr分别为前后车轮侧偏角;a、b为整车质心至前后轴的距离;L为轴距;h为侧倾力臂;Kf、Kr分别为前后轮侧偏刚度;Cf、Cr分别为前后侧倾角刚性;Df、Dr分别为前后悬架侧倾角阻尼;Ef、Er分别为前后悬架侧倾转向系数;i为转向系总传动比;Dw为前轮回正力臂;Is为转向盘转动惯量;Iw为两前轮绕主销的转动惯量;ks为转向系统当量刚度;Cs为转向系统当量阻力系数;α为转向柱与Z轴的夹角;T为转向盘上的输入力矩。
2 非线性轮胎侧向力模型
对汽车转向稳定性的分析涉及复杂的轮胎多向受力运动特性,若要仿真大离心加速度下的操纵运动,必须考虑轮胎非线性特性[10]。轮胎侧向力是车轮发生侧向滑动时抵抗侧滑的反作用力,它是汽车实现独立运动所依赖的重要作用力,且轮胎侧向力对汽车转向行驶稳定性有着重要影响。
汽车正常行驶时,侧向加速度小于0.4g(g为重力加速度),侧偏角在较小范围内,可认为轮胎侧向力(FY f、FYr)与侧偏角(βf、βr)成线性关系[11]:
(5)
式中,kf、kr分别为线性轮胎侧向力模型时前后轮胎侧偏刚度。
汽车行驶过程中存在着弯道及倾斜路面,为避免因侧滑而产生交通事故,轮胎应提供足够的侧向力。设汽车以侧向加速度aY做圆周运动,则整车离心力为maY,且
aY=v2/ρ
(6)
式中,ρ为圆周运动半径。
假设同轴左右轮胎侧向力相等,则前后轴轮胎侧向力分别为
(7)
根据Fiala轮胎侧偏特性公式,设侧向力以地面附着力μ mg(μ为路面附着系数)为饱和状态,以侧偏角的二次式近似表示轮胎侧向力[12-13]:
(8)
由此求得转向状态下单位侧偏角的侧向力,即非线性轮胎侧向力模型时前后轮胎侧偏刚度为
(9)
可得非线性轮胎侧向力为
(10)
将式(1)~式(4)整车系统转向行驶方程组中的Kf、Kr分别用kf和kr代替,可得到线性轮胎侧向力对汽车转向稳定性的影响。
3 数值仿真与虚拟样机试验验证
对汽车高速转向稳定性进行实车试验存在着较高的危险性,为验证分析结果的正确性,本节采用ADAMS仿真软件对样车进行虚拟试验验证,样车参数如表1所示。轮胎模型采用ADAMS中自带的Fiala轮胎模型。
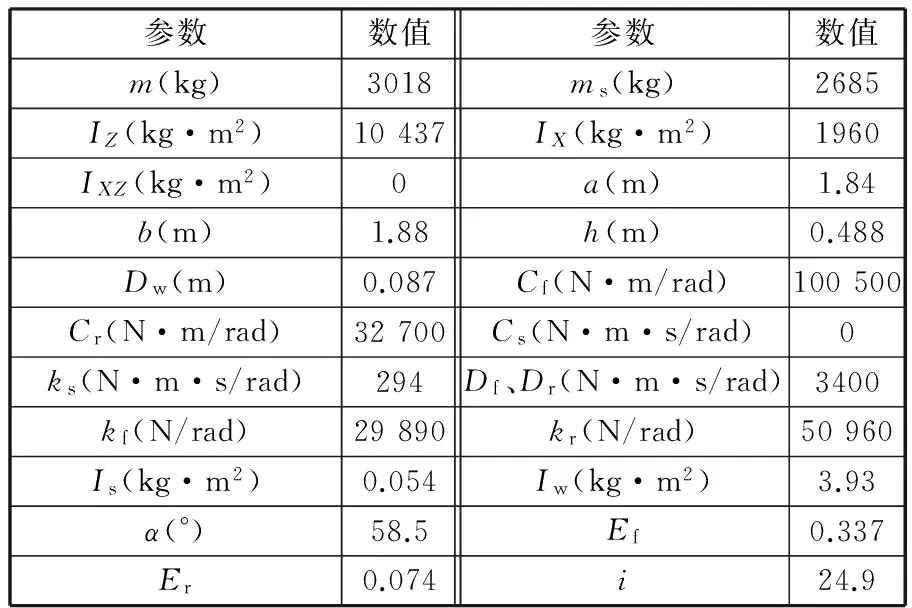
表1 样车参数
首先对样车建立悬架、车身、转向等子系统模型;然后建立各子系统之间及各子系统与ADAMS提供的实验台之间相互交换信息的输入、输出信号器“Communicator”;最后按系统组装成整车虚拟样机试验模型,如图3所示。
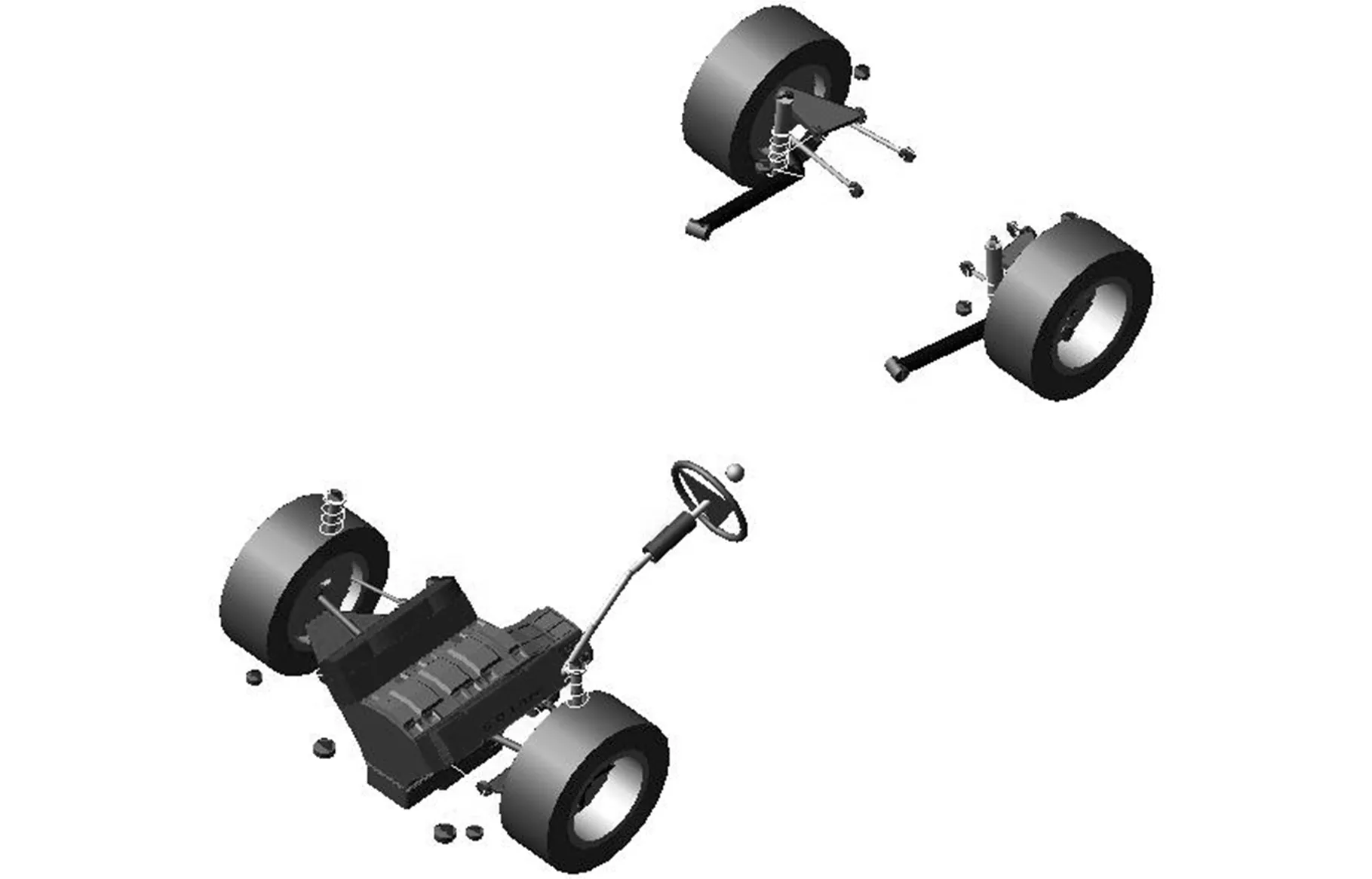
图3 整车虚拟样机试验模型
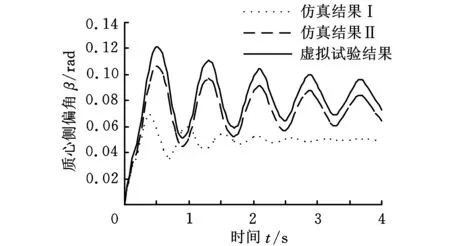
为分析轮胎侧向力对汽车转向行驶稳定性的影响,给转向盘一个iT=530 N·m的力阶跃输入以模拟汽车转向行驶,取质心侧偏角、车身侧倾角和前轮转角为待求解状态变量。运用MATLAB对整车系统转向行驶方程组(式(1)~式(4))进行求解,以获得在线性轮胎侧向力模型和非线性轮胎侧向力模型下转向汽车各运动状态的仿真结果,并与ADAMS虚拟试验结果相比较。图4和图5分别是车速为60 km/h和120 km/h时转向汽车各运动状态的仿真结果及虚拟试验结果。图中,仿真结果Ⅰ为线性轮胎侧向力模型下所得结果,仿真结果Ⅱ为非线性轮胎侧向力模型下所得结果。
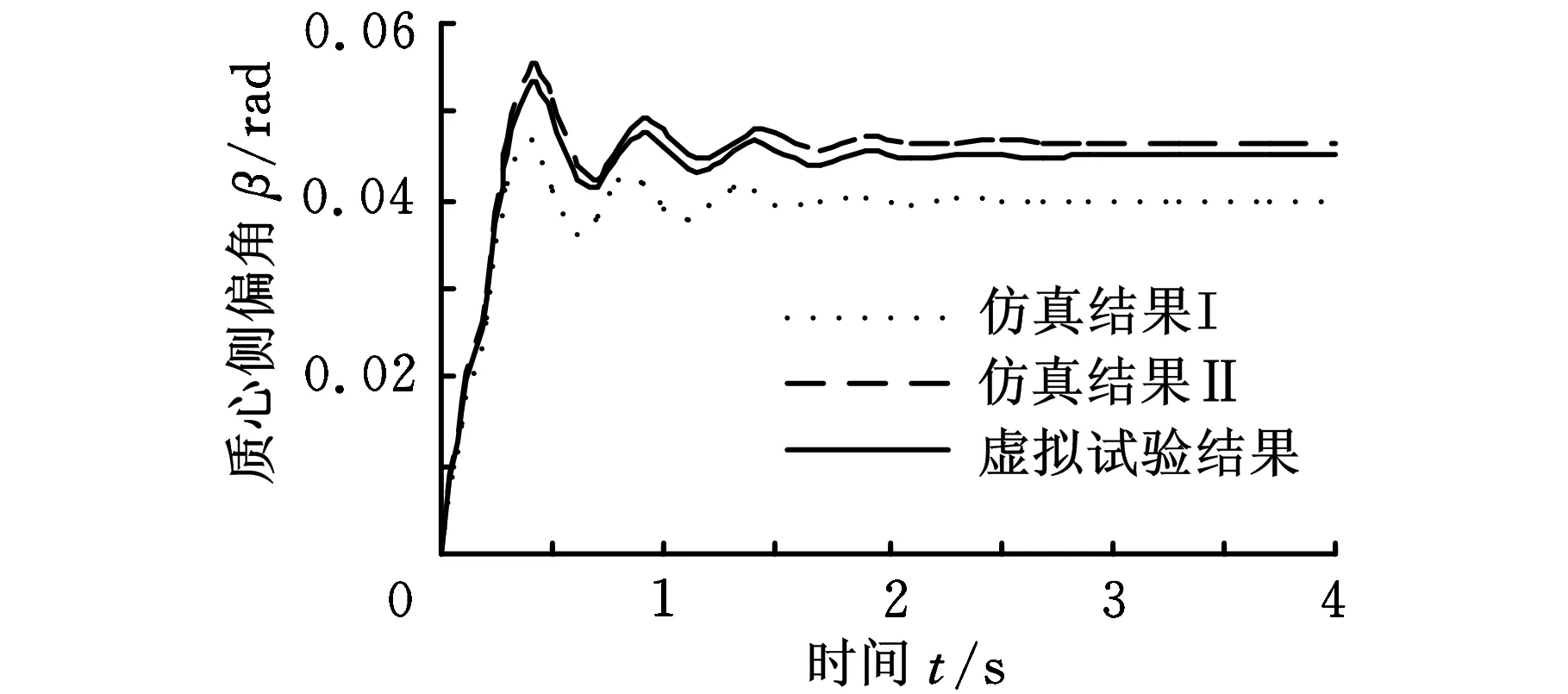
(a)质心侧偏角
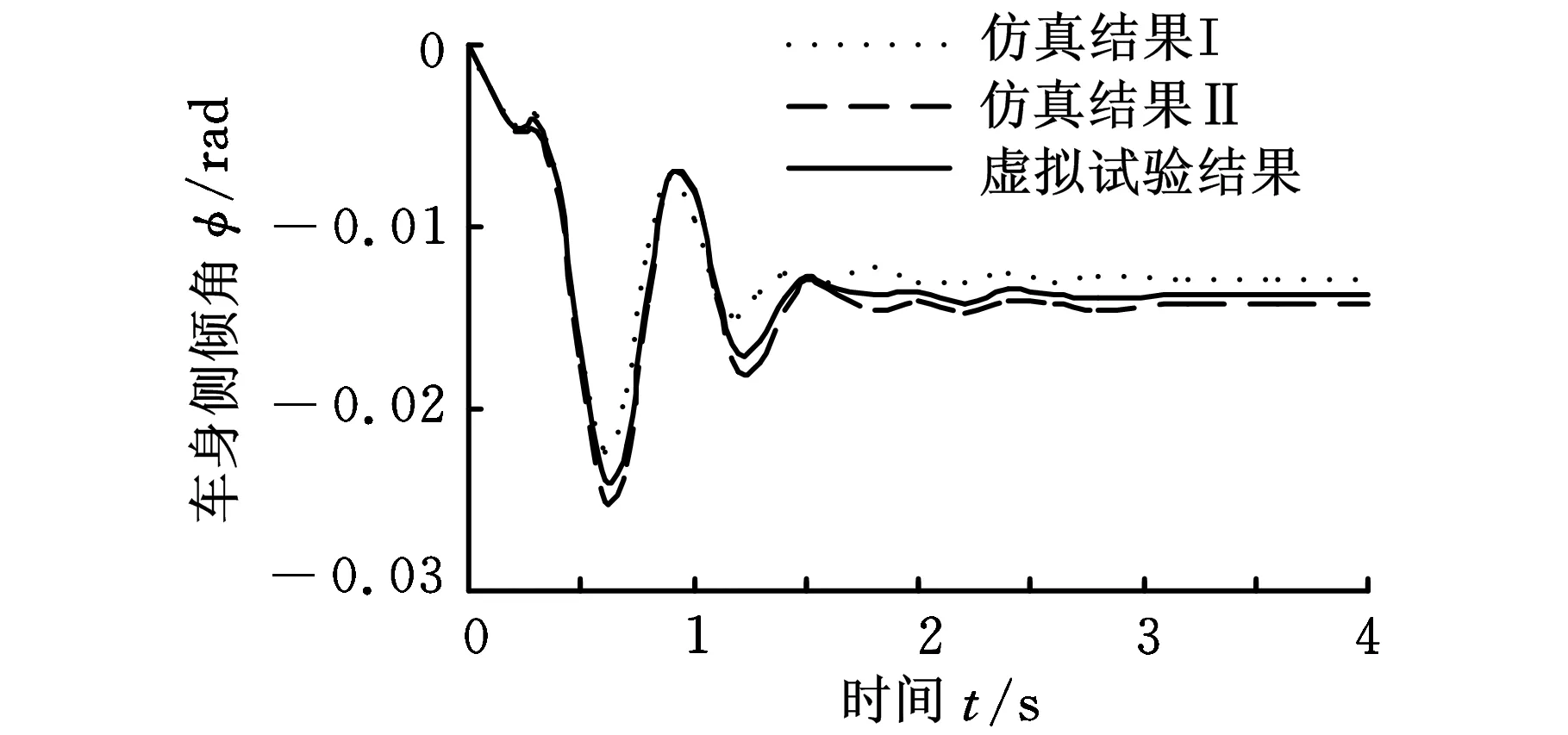
(b)车身侧倾角
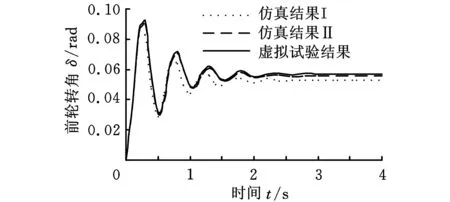
(c)前轮转角图4 车速60 km/h时转向汽车各运动状态的响应
由图4和图5可看出,随着车速的提高,各运动状态响应幅度增大,波动剧烈,稳定时间变长,轮胎表现出的非线性愈明显,不同轮胎侧向力模型下仿真结果差别很大。且非线性轮胎侧向力模型下仿真结果与ADAMS虚拟试验结果吻合程度较好,说明采用非线性轮胎侧向力模型,特别是高速时能获得更准确的汽车运动状态分析结果。
(a)质心侧偏角

(b)车身侧倾角

(c)前轮转角图5 车速120 km/h时转向汽车各状态的响应
为了更加直观地比较汽车转向时应用不同轮胎侧向力模型对汽车转向稳定性的影响,定量比较两种轮胎模型(分别简称为线性模型和非线性模型)下分析结果的准确性,本文给出了仿真结果相对于虚拟试验结果的平均绝对误差和均方根误差,如表2和表3所示。
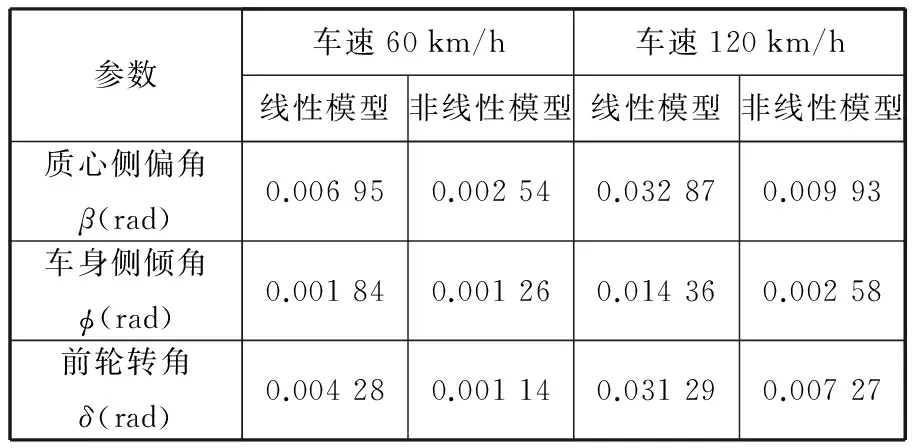
表2 两种轮胎模型下各运动状态的平均绝对误差
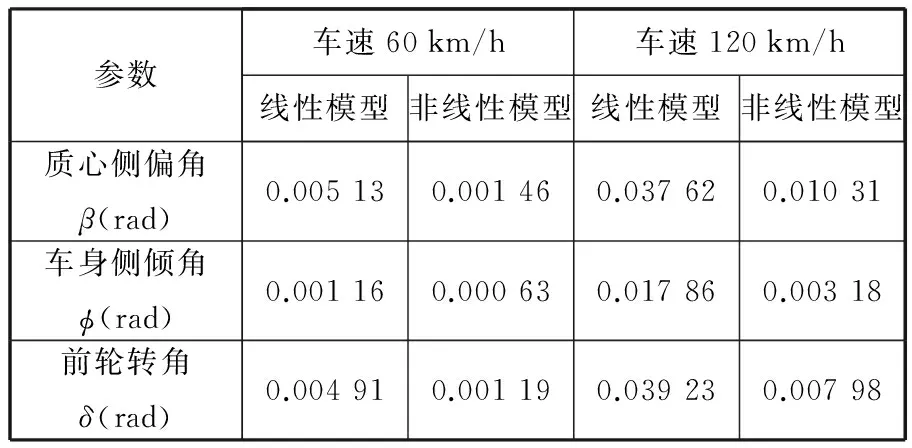
表3 两种轮胎模型下各运动状态的均方根误差
表2和表3结果表明,在同等条件下,采用非线性轮胎侧向力模型时仿真结果的平均绝对误差都能控制在状态幅值的10%以内,精确度高于采用简化线性模型时的相应仿真结果,特别是在高速转向工况下。由以上对比结果可知:非线性轮胎侧向力模型能更准确地反映出高速转向行驶运动状态,采用非线性轮胎侧向力模型分析和设计汽车转向稳定控制系统更具有实际应用价值。
4 实车试验验证
为验证仿真分析结果进行了蛇形线实车试验,并将试验结果与非线性轮胎侧向力模型下的仿真结果进行了对比。在试验车上安装角速度垂直陀螺仪用以测定汽车横摆角速度、侧向加速度和车身侧倾角,安装非接触式速度传感器(其连接方式见文献[14])用以测量汽车纵向速度、侧向速度。高速下进行蛇形试验不仅对驾驶员的技术要求比较高,而且具有一定的危险性,根据试验规定最高蛇形试验车速不得高于80 km/h,本试验中车速为50 km/h。图6中分别给出了汽车质心侧偏角、车身侧倾角和前轮转角仿真结果和试验结果的对比。
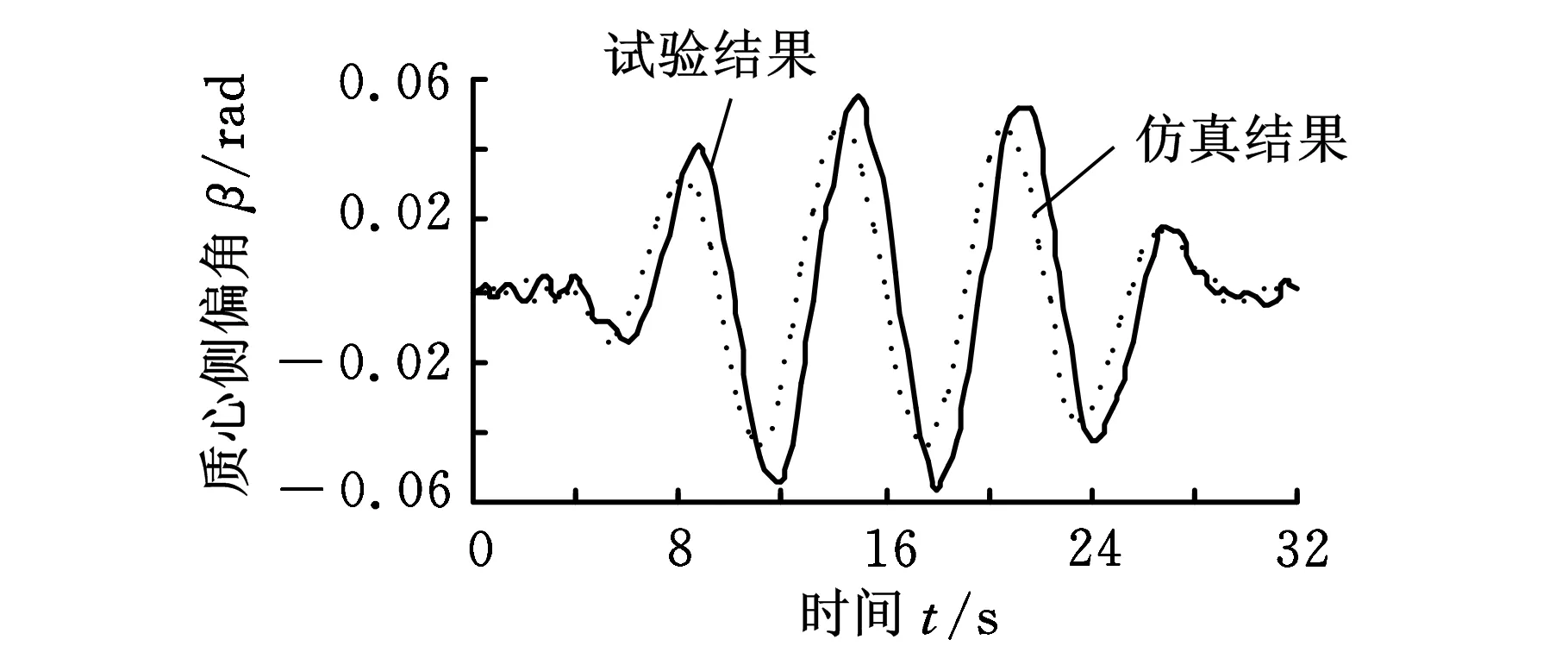
(a)汽车质心侧偏角

(b)车身侧倾角
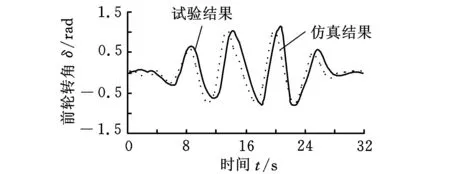
(c)前轮转角图6 各运动状态试验结果与仿真结果对比
从图6可看出两者之间趋势一致性较好,略有偏差存在;产生偏差的原因主要在于所用整车模型及非线性轮胎侧向力模型在模拟汽车受力及轮胎力学特性时与实际状况有一定的差异。
5 结束语
为分析轮胎侧向力对汽车转向稳定性的影响,采用四自由度整车动力学模型及非线性轮胎侧向力模型进行了仿真研究,并通过虚拟试验和实车试验进行了验证。研究结果表明,基于非线性轮胎侧向力模型的仿真结果与试验结果较为相近,且趋势一致性较好,能更真实地反映各运动状态响应。随着车速的提高,线性轮胎侧向力模型仿真结果偏离虚拟试验结果程度愈加明显,特别是高速行驶时。研究结果为重型商用车转向行驶安全控制系统的设计和分析提供了理论依据和研究方法。
[1]Grip H F, Imsland L, Johansen T A, et al. Vehicle Sideslip Estimation: Design Implementation and Experimental Validation[J]. IEEE Control Systems, 2009, 29(5):36-52.
[2]Baffet G, Charara A, Lechner D. Estimation of Vehicle Sideslip, Tire Forceand Wheel Cornering Stiffness[J]. Control Engneering Practice, 2009, 17(11): 1255-1264.
[3]朱绍中, 高晓杰, 余卓平. 极限行驶条件下车辆质心侧偏角观测器设计[J]. 同济大学学报(自然科学版), 2009, 37(8): 1070-1074,1114.
Zhu Shaozhong, Gao Xiaojie, Yu Zhuoping. Vehicle Sideslip Angle Estimation under Extreme Driving Condition[J]. Journal of Tongji University (Natural Science), 2009, 37(8): 1070-1074, 1114.
[4]潘筱, 陈潇凯, 林逸, 等. 基于遗传算法的汽车平顺性和操纵稳定性优化[J]. 北京工业大学学报, 2012,38(11): 1638-1642.
Pan Xiao, Chen Xiaokai, Lin Yi, et al. Optimization Study on the Vehicle Handling Stability and Ride Comfort Using Genetic Algorithm Method[J]. Journal of Beijing University of Technology, 2012, 38(11): 1638-1642.
[5]邢素芳, 冯泽军, 李欣业, 等. 基于轮胎非线性模型的汽车操纵系统的动力学分析[J]. 河北工业大学学报, 2010,39(4): 27-30.
Xing Sufang,Feng Zejun,Li Xinye, et al. Dynamical Analysis of Vehicle’s Control System Based on the Nonlinear Model of Tires[J]. Journal of Hebei University of Technology, 2010, 39(4): 27-30.
[6]Solmaz S,Baslamisli S C. A Nonlinear Side Slip Observer Design Methodology for Automotive Vehicles Based on a Rational Tire Model[J]. Advanced Manufacturing Technology, 2012, 60(5/8): 765-775.
[7]屈求真, 刘延柱. 基于轮胎非线性特性的汽车动力学问题[J]. 力学季刊, 2000, 21(1):38-44.
Qu Qiuzhen, Liu Yanzhu. On Dynamics of Vehicle Based on Nonlinear Characteristics of Tires[J]. Chinese Quarterly of Mechanics, 2000, 21(1):38-44.
[8]Hsu Y H J, Laws S, Gadda C D, et al. A Methodto Estimate the Friction Coefficient and Tire Slip Angle Using Steering Torque[C]//International Mechanical Engineering Congress and Exposition: Dynamic Systems and Control(Parts A and B).Chicago,2006:515-524.
[9]Baslamisli S C, Solmaz S. Construction of a Rational Tire Modelfor High Fidelity Vehicle Dynamics Simulation under Extreme Driving and Environmental Conditions[C]//10th Biennial Conference on Engineering Systems Design and Analysis.Istanbul, 2010,3:131-137.
[10]郭孔辉. 汽车操纵动力学原理[M]. 南京: 江苏科学技术出版社, 2011.
[11]余志生. 汽车理论[M]. 4版. 北京:机械工业出版社,2006.
[12]尹浩, 赵又群, 徐培民, 等. 非线性高速汽车操纵逆动力学建模与仿真[J]. 农业机械学报, 2007, 38(9): 23-26.
Yin Hao, Zhao Youqun, Xu Peimin, et al. Modeling and Simulation of Nonlinear Vehicle Handling Inverse Dynamics[J]. Transactions of the Chinese Society of Agricultural Machinery, 2007, 38(9): 23-26.
[13]安部正人. 汽车的运动和操纵[M]. 陈辛波译.北京:机械工业出版社,1998.
[14]沈法鹏, 赵又群, 林棻. 基于卡尔曼滤波的车辆侧偏角软测量[J]. 农业工程学报, 2013, 29(10): 71-75.
Shen Fapeng, Zhao Youqun, Lin Fen. Soft Sensor of Vehicle Side Slip Angle Based on Kalman Filter[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(10): 71-75.
(编辑卢湘帆)
Effects of Nonlinear Tire Lateral Force on Vehicle Steering Stability
Shen Fapeng1,2Zhao Youqun1Zhao Hongguang2Liu Yingjie1
1.Nanjing University of Aeronautics and Astronautics,Nanjing,210016 2.Shandong Transport Vocational College,Weifang,Shandong,261206
To analyze the effects of tire lateral force, a nonlinear model of tire lateral force was established and a 4-DOFs vehicle dynamics model was adopted to calculate the responses of vehicle side slip angle and roll angle and front wheel steering angle with different velocities. The results of virtual experiments based on ADAMS and real vehicle experiments demonstrate that the nonlinear tire model can more accurately reflect the response of vehicle movement states under the conditions of high-speed steering, and the mean absolute errors of each state response can be guaranteed within 10% of the corresponding state amplitude. The conclusions may provide theoretic direction for the design of vehicle stability control system.
steering stability; tire lateral force; nonlinear; movement state
2014-09-30
国家自然科学基金资助项目(10902049, 11072106);山东交通职业学院科技项目(2014SJZKY05)
U461.1< class="emphasis_italic">DOI
:10.3969/j.issn.1004-132X.2015.01.024
沈法鹏,男,1979年生。南京航空航天大学能源动力学院博士研究生,山东交通职业学院科研处讲师。主要研究方向为车辆系统动力学。赵又群(通信作者),男,1968年生。南京航空航天大学能源动力学院教授、博士研究生导师。赵洪光,1978年生。山东交通职业学院科研处讲师。刘英杰,1982年生。南京航空航天大学能源动力学院博士研究生。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
中国惯性技术学报(2019年6期)2019-03-04
物理教学探讨(2018年1期)2018-02-13
汽车文摘(2015年11期)2015-12-02
汽车文摘(2014年10期)2014-12-13