弹道相机星体标校系统设计与实现
2015-10-29 07:21梁国龙何丁龙
中国科技纵横 2015年24期
梁国龙 何丁龙
(中国科学院 长春光学精密机械与物理研究所,吉林长春 130033)
弹道相机星体标校系统设计与实现
梁国龙何丁龙
(中国科学院 长春光学精密机械与物理研究所,吉林长春130033)
为了提高光电经纬仪测角精度,实现经纬仪对目标的精确空间定位,本文设计了外场星体标校系统。介绍了系统组成、工作原理及试验结果分析。利用xxxx弹道相机作为载体,进行了设计、加工、运输,在外场进行了试验。试验结果表明:该弹道相机可实现精确定位,精度优于10″,满足指标要求。
星体标校经纬仪弹道相机
1 引言
星体标校是利用恒星在天上的准确位置作为真值来标定光电经纬仪的各单项误差并结算系统指向精度的方法。光电经纬仪从生产到运输到基地,再到在基地经历过维修后,其总精度和各个单项误差都需要计算,利用星体标校是一种最简单也最准确的方法。
2 系统组成及工作原理
根据天文学原理,对于确定的恒星,在已知的时刻,星体相对于测量站的地理位置(β,)的视位置(A,E)是准确可知的,即在某已知时刻T,地球某观测点的光电经纬仪瞄准星体时,其俯仰角真值E和方位角真值A与测量站的地理位置(λ,Φ)的关系是确定的的,其关系式为

星体标校采用加拿大的1m60CCD相机,分辨率1024x1024。可见光标校分系统是拍星光学系统。图像记录分系统负责记录拍星图像,随动分系统负责引星,操作与控制分系统负责与相机通讯、引导仪器跟踪星位置、操作各个分系统完成星体标校。系统组成框图如图1所示。
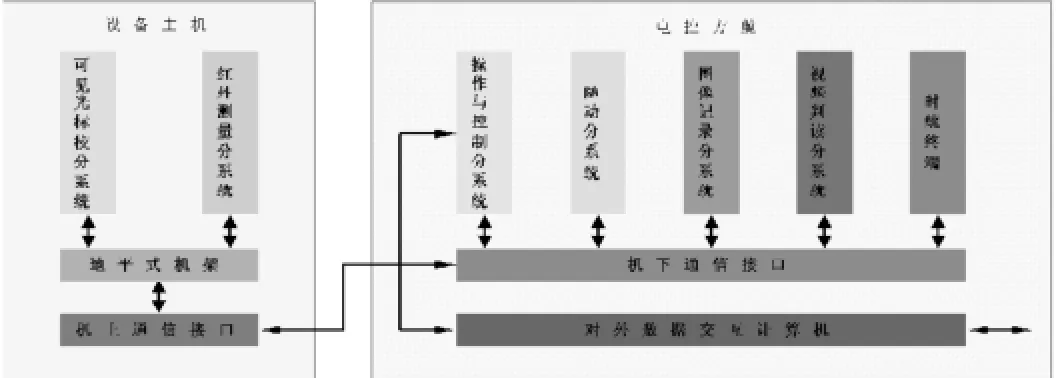
图1 系统组成框图
系统上电后,操作人员在操作与控制分系统中选择星号,并根据星号计算出当前时刻星的位置,1m60CCD相机采集,操作与控制系统引导主机跟踪当前星体,对采集到的图像经过处理后计算出当前系统的实际指向在通过最小二乘法计算出各单项误差。
3 系统设计与实现
相机采用加拿大的1m60高灵敏度ccd相机,通过自研光学系统,焦距200,视场可达4°x4°,对星的探测能力为3-5等星,相机与光学系统的实物如图2所示。

图2 相机及光学系统实物图

图3 主控软件界面
操作与控制分系统是在Windows XP中文操作系统SP2+操作平台下,VC++面向对象编程实现。充分利用XP操作系统的多任务多线程机制,软件设计过程中采用模块化结构。拍星界面如图3所示。其中主要部分为星库的显示,在初始化星库之后通过点击星图进行选星,在选择完星体之后通过引导使光学系统对星体成像。对图像进行阈值计算、目标分割、脱靶量合成后得出光学系统的实际指向,与此时的真值进行比较,可得出定向差、照准差、零位差和横轴差等单项误差。
4 试验结果与分析

图4拍星原始数据
值的误差的均方根,在方位上是:4.0″,在俯仰上是7.2″。试验得到的原始数据如图4所示。
5 结语
本文通过装载已知恒星库,设计了xxxx弹道相机的星体标校系统,在总装某基地进行了外场验证。经试验表明,星库提供角度准确,系统跟踪稳定,精度结算算法高效、精确,精度结果满足要求。
[1]刘中富.应用GPS授时时角拍星法标校测角精度[J].光电工程,2004,31(增刊):1-4.
[2]车双良.光电经纬仪外场星校方法的理论与实践[J].光子学报,2004,33(10):1-6.
梁国龙(1983—),男,吉林公主岭人,博士学位,助理研究员,主要从事数字图像处理方面的研究;何丁龙(1988—),男,吉林长春人,工程硕士,研究实习员,主要从事光电经纬仪设计和研究。
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
数学物理学报(2021年5期)2021-11-19
科学技术创新(2021年11期)2021-05-25
数学物理学报(2019年5期)2019-11-29
电子制作(2019年7期)2019-04-25
测控技术(2018年3期)2018-11-25
宇航计测技术(2018年3期)2018-09-08
百科探秘·航空航天(2016年9期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
物理教师(2015年8期)2015-07-25