
基于积分反步控制的永磁直线同步电动机滑模速度控制*
2015-11-02 11:10戴跃洪唐传胜
组合机床与自动化加工技术 2015年3期
孙 华,戴跃洪,唐传胜
(1.西华大学机械工程学院,成都 610039;2.电子科技大学机电学院,成都 611731)
基于积分反步控制的永磁直线同步电动机滑模速度控制*
孙 华1,2,戴跃洪2,唐传胜2
(1.西华大学机械工程学院,成都 610039;2.电子科技大学机电学院,成都 611731)
文章考虑一种不确定载荷的永磁式同步直线电机驱动系统提出了一种改进鲁棒非线性控制器。该控制器是基于新的积分反步法设计的,这是一种对复杂非线性系统有用的鲁棒控制方法,通过引入积分以减少稳态误差。根据Lyapunov稳定理论对所提出的反馈控制律的稳定性进行验证。与传统的基于PID控制比较并给出了Matlab仿真的滑模速度观测器比较,这证明了该PMSLM驱动系统控制方法的可行性和有效性。
永磁式同步直线电动机;积分反步控制;PID控制
0 引言
永磁同步直线电机(PMSLM),它具有高效率、高功率密度、高精确度和可重复性等许多理想的性能特点;它易于维护,低振动和噪声,被广泛用于工业应用,例如机器人系统、机床、磁悬浮车辆等[1-3]。然而,在实际PMSLM伺服系统中,有大量的干扰和不确定性例如:未建模动态、参数不确定性、摩擦和负载扰动。由于这些原因,近日大家一直致力于解决控制PMSLM的问题[4,5]。最简单的方案是基于一个或多个级联PID控制,这在工业实践中极为常见[6]。众所周知,这些方案由于其结构简单、易于实现而被广泛使用,但他们在某些特定的领域内无法实现精确控制。最近,许多非线性控制方法被开发出来以提高系统的控制性能,如自适应控制、滑模控制、鲁棒控制、自学习控制、预测控制、智能控制[7-13]。然而,也有一些缺陷阻碍这些方法在实际中应用,例如,它的自适应控制技术需要一个参数的自适应机制,这增加了系统的成本和复杂性,并降低其反应能力。模糊控制需要模糊关系以满足特定匹配条件,它表现出固有的抖动;智能控制器的程序结构过于复杂。反步积分自适应控制是一个系统的递推设计方法的非线性系统[14]。在该方法中,如果选择适当的控制输入,控制系统可以快速稳定。该方法已成功地用来实现直线感应电机的位置控制[15,16]。在本文中,我们用这种方法来实现高性能的速度跟踪。
1 PMSLM的动态数学模型
在d-q旋转坐标系上,表面安装的永磁直线同步电机可以表示如下[17]:


2 PMSLM控制器设计
本文的目的是为了获得控制电压来实现高性能的速度跟踪。因此,本文的重点是通过积分反步控制方法获得控制电压,详细设计过程包括如下。
步骤1:定义的速度跟踪误差

其中v*是所需的引用动机的转速,速度和误差的动态如下

对Lyapunov函数V1求导,代入(5)式,得:

如果定义了以下的稳定的虚拟控制功能实现速度跟踪控制:

步骤2:电流跟踪误差定义如下:

由(3)、(7)得:


(kd>0,kq>0)故:0,因此,根据Lyapunov稳定性理论,所设计的控制器是渐近稳定的。
3 试验仿真结果

图1 基于PID控制方案的PMSLM驱动系统方框图
对该方案的有效性的研究,传统基于PID控制的滑模估计器和基于以积分反步控制为基础的直线电机驱动是利用MATLAB/Simulink软件包进行分析。一个典型的基于PID控制的矢量控制的永磁直线同步电机如图1所示,所提出的控制方案如图2所示。系统参数如表1所示。选择固定步长为1e-5的ode45算法。PID控制参数选择如下:在速度回路中kvp=0.04,kvi=2.05,kvd=0;在电流回路中kdp=300,kdi=800,kqp=300,kqi=800,IBPC控制参数选择如下:k0=300,kv=800,kd=300,kp= 800。对于PID控制和IBPC控制的PMSLM驱动系统仿真结果示于图3a~图3d,表示了起动性能以及载荷突然冲击的影响。驱动系统在一个恒定的载荷(200N)和1 m/s的参考速度下启动。从图3可以看出,IBPC控制比传统的PID控制具有更好的起动性能和鲁棒性。在t= 0.1s时间内有突然冲击载荷作用,IBPC控制的系统可以在低于0.01s的时间内恢复到参考速度。比PID控制的系统少0.1s。可以从图看到图3b~图3d,该方法比PID控制具有较小的力和电流波动。
图4a~图4d显示了PID控制和IBPC控制方案在速度增加时电机驱动系统的性能。我们可以从图4中q轴电流看出该IBPC控制方案比PID方法控制具有更好的瞬态响应性能。图4b~图4d也表明,该方法比PID控制具有更小的力和电流波动。
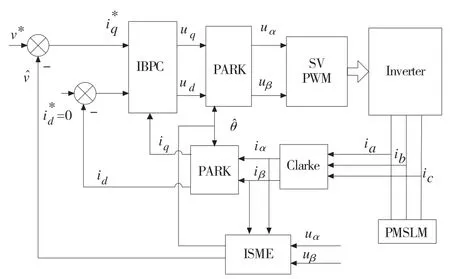
图2 基于IBPC的PMSLM驱动系统的方框图

表1 本文中使用的SPMSM参数

图3 采用PID控制与所提出的方案控制PMSLM驱动系统在外载荷冲击的响应
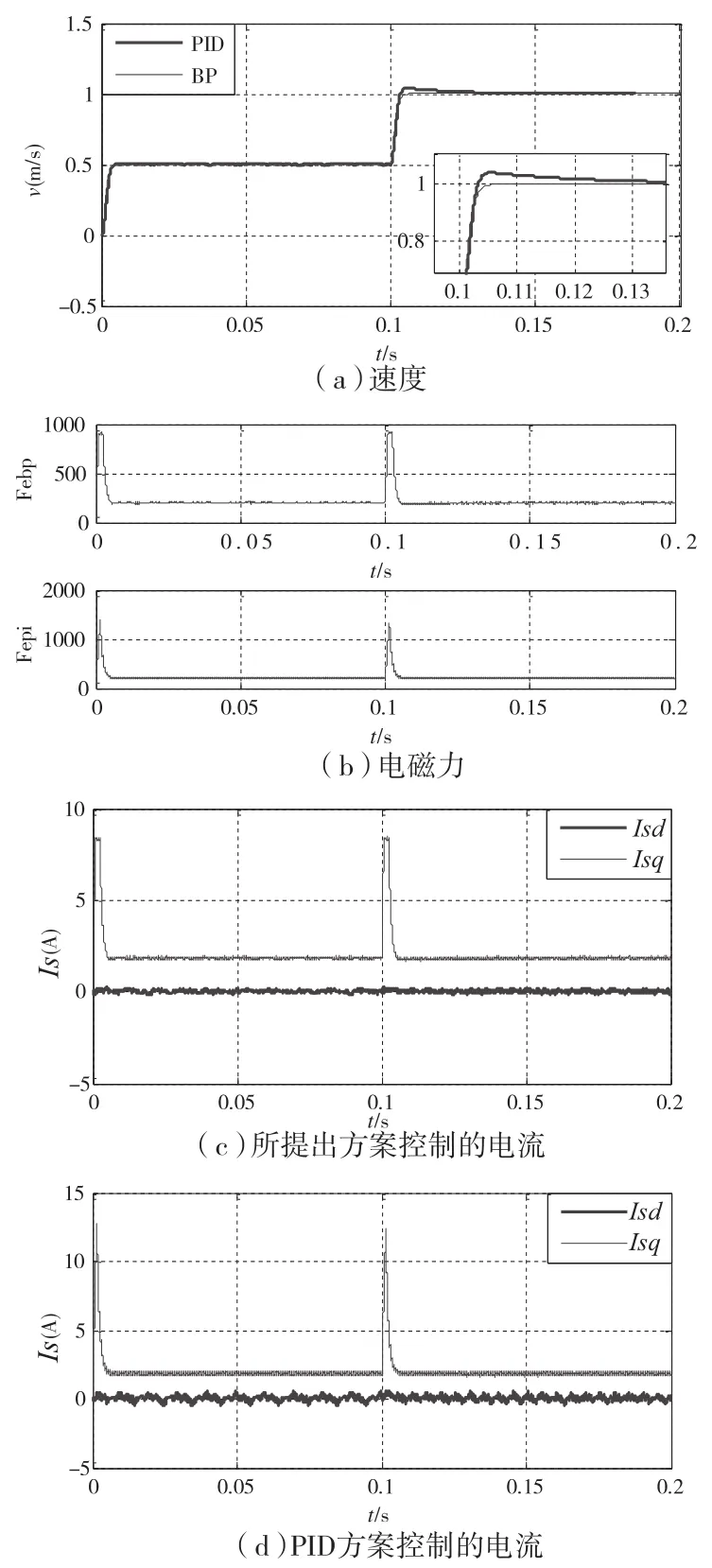
图4 采用PID控制与所提出的方案控制PMSLM驱动系统在速度突变时的响应
5 结论
首先,该控制器比传统的PID控制结构简单。从图1可见,在传统的基于PID的矢量控制系统中有三个PI控制器,包括一个PI速度控制器和两个PI电流控制器。然而,从图2可见,所提出的方法只有一个控制器;其次,该控制方案比传统的PID控制具有较少的控制参数。在所提出的控制器中,它有约3~4个控制参数,而在传统的PID控制中;它需要6~9个控制参数。然后,该控制器比PID控制具有更好的跟踪性能和鲁棒性。
[1]Zhao D,Deng X,Yi J.Motion and internal force control for omnidirectional wheeled mobile robots[J].IEEE/ASME Trans Mechatronics,2009,14(3):382-387.
[2]Li X,Du R,Denkena B.Tool breakage monitoring using motor current signals for machine tools with linear motors[J].IEEE Trans Ind Electron,2005,52(5):1403-1408.
[3]Hoburg JF.Modeling maglev passenger compartment static magnetic fields from linear Halbach permanent-magnet arrays[J].IEEE Trans Magn,2004,40(1):59-64.
[4]Yao WH,Tung PC,Fuh CC,et al.A Robust Uncertainty Controller With System Delay Compensation for an ILPMSMSystem With Unknown System Parameters[J].IEEE Trans Ind Electron,2011,58(10):4727-4735.
[5]Lin FJ,Chou PH,Chen CS,Lin YS.DSP-Based Cross-Coupled Synchronous Control for Dual Linear Motors via Intelligent Complementary Sliding Mode Control[J].IEEE Trans Ind Electron,2012,59(2):1061-1073.
[6]Tang KZ,uang SN,Tan KK,etal.Combined PID and nonlinear control for servo mechanical systems[J].Mechatronics,2004,14(6):701-714.
[7]苏亮亮,魏玲玲.异步电机定子磁场定向无速度传感器矢量控制研究[J].组合机床与自动化加工技术,2014(5):150-154.
[8]王洋,刘永光.基于Simulink的永磁同步电机矢量控制系统仿真[J].组合机床与自动化加工技术,2011(2):78-82.
[9]高延荣,舒志兵,耿宏涛.基于Matlab/Simulink的永磁同步电机(PMSM)矢量控制仿真[J].机床与液压,2008,36(7):296-299.
[10]张海啸,王淑红.基于SVPWM永磁同步电机控制系统的建模与仿真[J].电气技术,2007(9):36-39.
[11]刘桂秋,潘德栋,李龙.基于模糊参数逼近器的永磁同步电机反推控制[J].组合机床与自动化加工技术,2014(5):117-120.
[12]徐艳平,钟彦儒.基于空间矢量PWM的新型直接转矩控制系统仿真[J].系统仿真学报,2007,19(2):344-347,375.
[13]夏加宽,沈丽,彭兵,等.永磁直线伺服电机端部法向力波动分相补偿控制[J].组合机床与自动化加工技术,2014(2):73-77.
[14]Shieh HJ,Shyu KK.Nonlinear sliding-mode torque control with adaptive backstepping approach for induction motor drive[J].IEEE Trans Ind Electron,1999,46(2):380-389.
[15]Lin FJ,Chang CK,Huang PK.FPGA-based adaptive backstepping sliding-mode control for linear induction motor drive[J].IEEE Trans Power Eletron,2007,22(4):1222-1231.
[16]Lin FJ,Shieh PH,Chou PH.Robust adaptive backstepping motion control of linear ultrasonic motors using fuzzy neural network[J].IEEE Trans Fuzzy Syst,2008,16(3):676-692.
[17]Fujimoto Y,Kominami T,Hamada H.Development and analysis of a high thrust force direct-drive linear actuator[J]. IEEE Trans Ind Electron,2009,56(5):1383-1392.
(编辑 李秀敏)
Control of Permanent Magnet Linear Synchronous Motor Based on Sliding Velocity Integral Backstepping Control
Sun Hua1,2,DAI Yue-hong2,TANG Chuan-sheng2
(1.School of Mechanical Engineering,Xi Hua University,Chengdu 610039,China;2.School of Mechatronics Engineering,University of Electronic Science and Technology of China,Chengdu 611731,China)
The permanent magnet synchronous linear motor drive system considered in this paper presents an uncertain load a new robust nonlinear controller.The controller is based on a new backstepping design,which is a complex nonlinear system is useful for robust control methods.By introducing integral to reduce the steady state error.Lyapunov stability theory based on the stability of the feedback control law proposed for validation.The comparison is based on the traditional PID control Compare and given Matlab simulation sliding mode observer and speed,which proved the feasibility and effectiveness of the PMSLM drive system control method.
permanent magnet synchronous linear motor;integral backstepping control;PID control
TH39;TG506
A
1001-2265(2015)03-0101-04 DOI:10.13462/j.cnki.mmtamt.2015.03.027
2014-07-09;
2014-08-22
西华大学制造与自动化实验室开放研究基金(szjj2014-030);国家科技重大专项(2009ZX04001)
孙华(1979—),男,云南曲靖人,西华大学实验师,博士,主要研究方向为智能控制,(E-mail)106191627@qq.com。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
北京航空航天大学学报(2016年7期)2016-11-16
