
基于RSSI权值的环境适应型室内定位算法研究
2015-11-04 09:06陈顺明李平
计算机工程与应用 2015年22期
陈顺明,李平
长沙理工大学计算机与通信工程学院,长沙410114
基于RSSI权值的环境适应型室内定位算法研究
陈顺明,李平
长沙理工大学计算机与通信工程学院,长沙410114
定位节点接收的信号强度指示(Received Signal Strength Indication,RSSI)值是室内指纹定位技术重要的元素之一。通过对定位节点接收到的信号强度值特性分析,提出了基于RSSI权值的室内定位算法。改进型RSSI权值计算公式以及权值指数α的提出,使得定位算法具有一定的环境适应性,能更灵活地运用于实际定位场景。经过一般实验场景验证,算法在定位精度上有较大的提升。
定位节点接收的信号强度指示(RSSI);权值;环境适应性;室内定位
近年来,随着各种无线通信技术的迅速发展以及移动设备的逐渐普及,室内环境下各种基于位置的服务需求日益迫切[1-3],无线室内定位算法的研究,已成为国内外研究的重点[4]。研究表明,基于RSSI指纹库的室内定位技术,由于操作简单、硬件花费少、容易实现等优点,目前,已成为室内定位技术研究的热点。但是,传统的指纹定位技术有着定位精度不高、不具有随实验环境场景进行变化调整等缺点,针对此点,本文提出了一种具有环境适应性的改进加权型室内定位算法。
1 基于RSSI指纹库的室内定位技术
室内环境复杂,定位干扰甚多,如多径传播、非视距传播、多址传播等都会带来定位误差[5],但是基于RSSI指纹库定位技术却利用多径传播等来构建节点位置信息,由于信号在室内传播过程中受到固定障碍物的影响,因而多经效应呈现出非常强的位置特性,对于每一个位置来说,传播信道的多经结构是唯一的,它的多径特征可以被认为是该位置的指纹,通过指纹匹配可以很容易地找出定位节点的位置坐标[6]。基于这样的原理,人们提出了基于RSSI值指纹库的室内定位技术。
指纹技术的定位过程一般分为两个阶段[7]:第一个阶段为离线采样阶段,该阶段的主要任务是建立RSSI指纹数据库V=[L1L2…Lj…Lm]。采集定位区域内各个位置点的RSSI值并形成样本位置指纹库,其中每一条数据都对应一个唯一位置Lj=[sj1sj2…sji…sjn]。第二阶段为在线定位阶段,该阶段通过测定定位节点所在位置实时信号强度值,然后采用匹配算法找出与指纹数据库中最为匹配的一条数据,从而确定定位节点的实际位置。
定位过程中采用的匹配算法是定位过程中的关键。目前,基于RSSI指纹库定位技术的匹配算法主要分为两类:第一类是确定性方法[8],如信号空间最近邻法和最接近K邻居法(K-Nearest Neighbors,K-NN)。第二类是基于概率性的方法[9],如贝叶斯算法。本文所要讨论的重点是的K-NN算法。
K-NN算法一般过程为[10]:首先,利用公式(1)计算定位点与样本点之间的信号欧几里德距离[11]。

其中,sji表示样本点的RSSI值,s′i表示定位节点RSSI值。
然后,选取其中距离最小的前K个,获得其样本坐标:

最后,通过质心计算得到定位点的定位坐标:
K-NN算法是指纹定位算法的一个重要匹配方法,由于K-NN算法简单、易操作,在室内定位被广泛应用。因此,许多改进型的指纹算法都是针对K-NN算法提出的。
2 相关研究
基于K-NN算法的指纹改进算法主要分为两大类:第一类是基于RSSI值的,李奇[12]等人根据定位点与样本点之间RSSI值的相关性,提出了相关性算法。通过公式(2)得出定位点与样本点RSSI值之间的相关系数ρ,然后选取ρ值最大的K个,再通过质心计算,得到定位点坐标。

第二类是基于信号距离的,这一类的改进分为两个方面,其一是加入权值的计算,汪媛卿等人[13]提出的基于距离权重(WDF)的指纹定位算法,在计算信号距离时,加入距离权值,权值定义为定位节点实测RSSI值与其训练值方差之间的差值,根据差值不同赋予不同的权值;其二是将信号距离转化为实际物理距离计算,Liang等人[14]提出的改进型K-NN算法(DWFW-KNN),根据实际验证节点之间的信号距离与物理实际距离之间有着较大的差异,利用LDPL(Log-Distance Path Loss)室内信号传播公式,将信号距离转化为物理距离进行计算,从而获得较高的定位精度。
以上算法对于室内定位精度都有着不同程度的提高,但是,这些算法都没有考虑定位节点RSSI值本身对定位的影响,通过对数据进行分析得知,RSSI值本身应该具有权重值,定位时不能统一计算;同时,上述一些改进算法都不能随着环境参量的改变而进行调整,不具备环境适应能力。在此,提出了基于RSSI权值的环境适应型室内定位算法—RW(RSSI-Weight)算法。
3 RW算法介绍
RW算法是基于RSSI值本身权重的定位算法,定位过程中根据定位节点接收信号强度值进行权值分配计算,而权值指数的调整变化,使得定位算法具有一定的环境适应性,从而使得定位计算更加贴近实际,定位精度更高。
3.1权值依据
在室内环境下,无线信号的传播符合LDPL衰减模型[15],用公式表示为:

化简得到:

其中,pd是在距离d处的信号能量,Pd0是在距离为d0处的信号能量,通常设为1,η是信道衰减参数,与当时实验环境相关。通过实验,可以得出实测接收信号强度值与距离之间的关系,如图1所示。

图1 RSSI值与距离关系
由公式(3)和图1,可以得出如下结论:RSSI值与距离成反比;距离越小,RSSI值越大,而较小的距离,说明节点间的相关性较大,因此具有较大的权值;反之,较大的距离,说明节点之间相关性较小,具有较小的权值。
3.2权值公式
根据上面得到的结论,再结合权值的一般定义,所以通常情况下,将权值公式定义为[13]:

经过多次数据训练,发现公式(4)并不适合应用于实际:首先,计算过程中公式(4)中分母数值过小(<10-4),累加过程中的四舍五入会给计算结果带来很大误差;其次,对于定位精度通过改进还可以进一步提升,如图2所示。
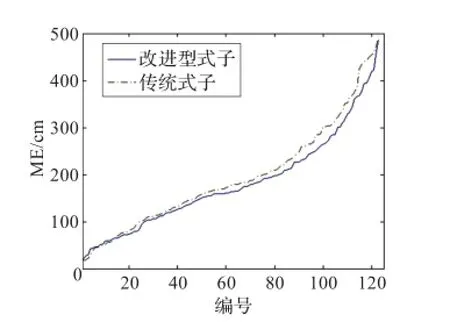
图2 改进型式子与传统式子误差比较
再者,由于公式固定,不能针对定位环境进行调整,而使得算法适应性不强。经过对数据的多次对比和分析,最终将RSSI权值公式定义为:

3.3权值指数
式子(5)中的指数α将其定义为权值指数,α的适应性变化使得RW算法具有一定的环境适应能力。α随着环境场景的改变而进行调整,使得定位算法能适应当时的定位环境,从而进一步减小定位误差。在不同的场景下α都有一个最佳值,最值范围一般为1.5~2.5。
α的变化会带来定位平均误差(Mean Error,ME)的相应变化,两者之间具有一定的函数关系,这是计算α值的方法。经过多次测试数据描点得到α与ME之间的关系如图3所示。
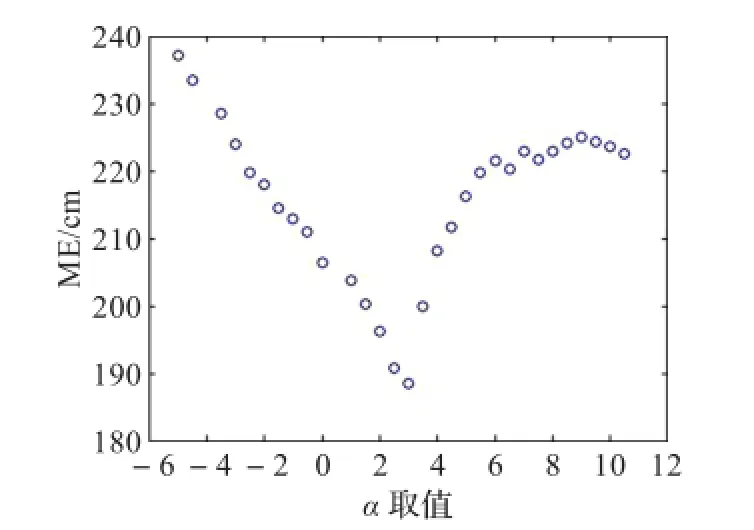
图3 α与ME之间的关系
由图3可以看出,ME可以用α的多项式函数表示出来,再通过最小二乘多项式拟合法可以求得其函数表达式。不妨设α与ME的函数为:

通过计算得到下面矩阵:
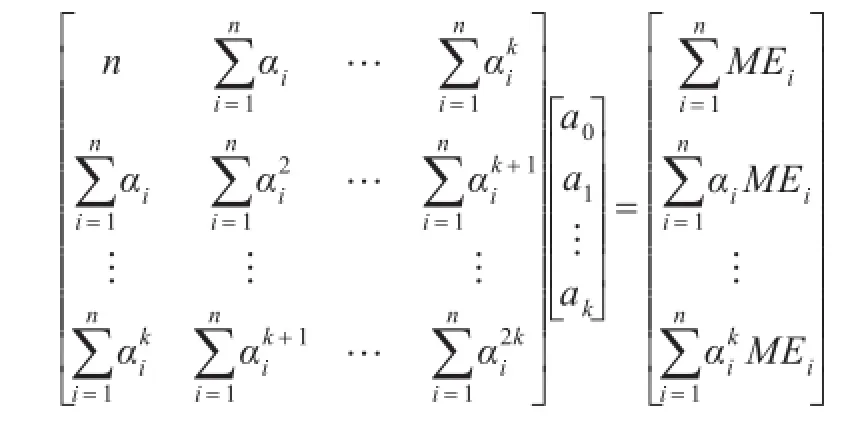
将这个范德蒙得矩阵化简之后得到:
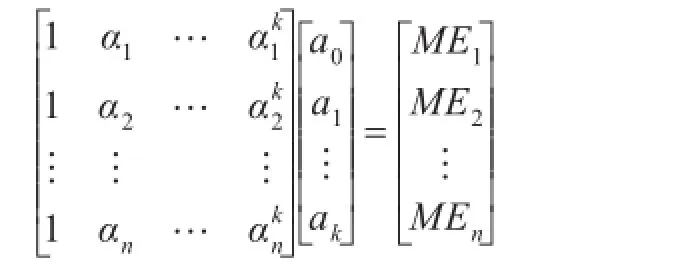
由此矩阵就可以得出系数矩阵A,从而得到α与ME之间的多项式函数的确切式子。
3.4RW算法计算式
由前文知道目前基于K-NN算法的指纹算法改进方向主要分为两类,因此,提出了加入RSSI权值计算的两类计算公式。
3.4.1相关性法计算公式
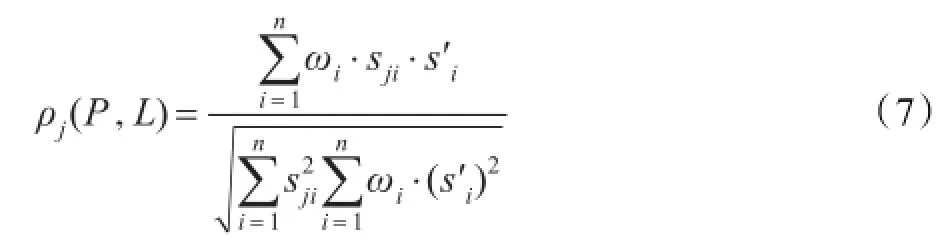
前文提到的相关性算法,在定位过程中将RSSI值赋予同样的置信度,进行统一计算,这样的计算并不完善,因此在式(2)中加入权值计算,得到新的改善公式:
3.4.2欧式距离计算公式
在计算信号距离的匹配算法中,也要加入RSSI权值计算。式(1)是计算定位节点与样本点之间欧式距离的一般公式,过程中,同样没有考虑定位点RSSI值的权重分配,而进行统一计算,为此,在式(1)的基础上提出加入RSSI权值的计算公式:

在此定义了RW算法的核心部分—RW计算公式。RW算法是在传统指纹定位算法的基础上进行改进的算法,在定位过程中加入定位节点RSSI权值计算,使得定位计算更加的完善,同时权值指数的存在,使得定位算法具有一定的环境适应性,能更灵活的应用于各类实验场景。
4 实验分析
算法是服务于实际应用,同样在实际应用中才能检验算法的优劣。通过数据分析,性能比较,才能知道算法是否能适用于实际或者优于现存算法。在定位算法的比较中,一些重要指标是可以判断一种算法的优劣,如平均定位误差、最小误差以及最大误差。因此,下面将对RW算法的性能指标进行实际比较。
4.1实验场景
实验场景设置在一个长为10 m,宽为9 m的室内实验室当中,具体布置如图4所示。
如图4所示:实验是设置在一般实验场景中,场景内部并不是空旷的,而是符合一般的实际情况,具有各种干扰和障碍,这样的场景更能检测出算法的性能。
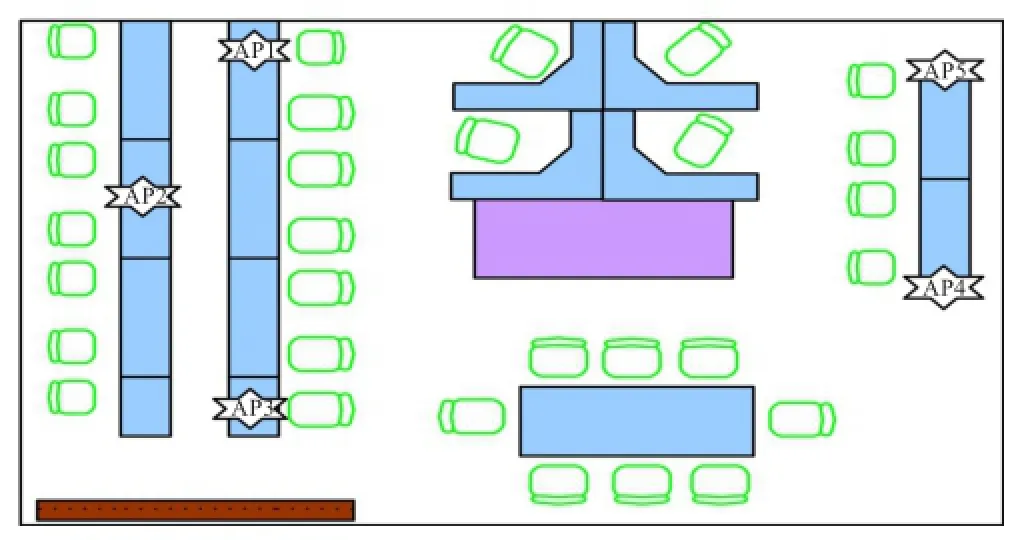
图4 室内实验场景布置
4.2实验过程
(1)采样节点均匀采集室内各个位置的样本坐标及RSSI值,并建立样本指纹数据库。
(2)定位节点在目标区域内随机选择150个位置,测量其坐标及实时RSSI值。
(3)利用公式(7)和(8)分别进行匹配定位计算并得到定位点估计坐标。
(4)求出定位点的估计坐标和定位点坐标之间的误差。
(5)分析各项性能指标。
上述过程中,为了减少测量和计算误差,都将进行多次测量,以其均值进行统计和计算。
4.3权值指数α的确定
在RW定位过程中还有一个重要的环节,就是在本次实验中权值指数α的取值。由前文以及式子(6)知道α与ME之间的函数关系,在实验过程中,可以通过数据的统计运算获得α和ME的对应数值,再经过描点和曲线拟合可以得到α与ME在本次实验中的确切表达式。如图3所示,即为α与ME之间的数值关系,通过最小二乘多项式曲线拟合可以得到这样一个函数曲线图,如图5所示。
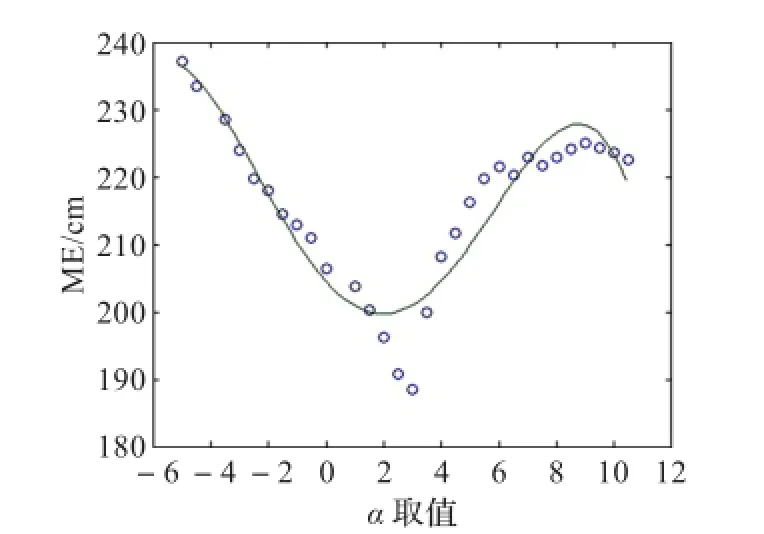
图5 关于α的拟合曲线
通过对数据的多次拟合,发现4次多项式函数,最为贴近α与ME之间的数值关系,所以α与ME之间的函数关系可以表示为:

根据式子(9),通过多项式函数导数求最值的方法,得到α的最值,将最值带入(9)中进行比较计算,最后得到ME的最小值,此时的α则为本次实验的最佳值。经过计算,本次实验最佳值为α=1.9。
4.4算法性能分析
通过上述过程获得的实验数据,需要进行比较才能发现其中的差异。将RW算法获得的各项数据指标与同类算法进行比较。
4.4.1与相关性算法比较
在相关性法的计算公式(2)的基础上提出的加入RSSI权值计算的式子(7),通过此式,RW算法可以用于RSSI相关性算法中,运用式子(7)计算后得到的结果与相关性法进行比较,如图6所示。
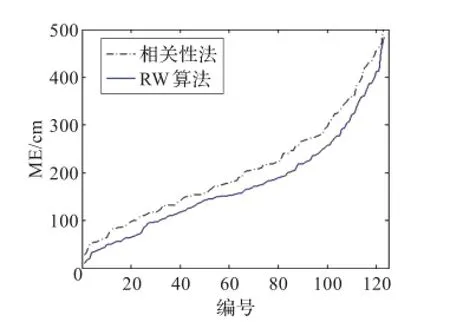
图6 RW算法与相关性法比较
由图6中可以看出RW算法在误差减少方面要优于相关性算法,其他性能指标可以通过下表进行了解。

表1 RW算法与相关性算法各项性能比较
由表1中可以看出,RW算法在平均误差方面相对于相关性算法有较明显的提升,而在其他方面两种算法的差异则不是很大,但是,从整体上分析RW算法要优于相关性算法。
4.4.2与基于欧式距离的算法比较
基于信号距离的算法是室内指纹定位算法中的主要算法,所以在提高定位精度方面,技术相对比较成熟,因此,与这类算法的比较更能看到RW的优劣所在。经过数据分析,得到图7。
由图中可以看出,RW算法在定位误差方面要优于同类算法,其他的性能指标可以通过下表进行了解。
由表2可以看出,RW算法在定位精度各项指标上,都要优于同类算法,尤其是在最小误差和平均误差方面,提升更是比较明显。
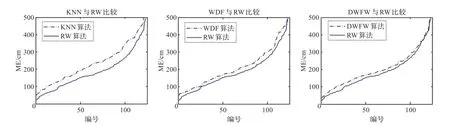
图7 RW算法与各类算法比较
5 结论
通过上述的实验分析,有这样一个结论:RW算法在定位精度各项指标上均优于同类算法,而且提升比较明显,尤其是在平均定位误差方面,误差为1.6 m,比室内定位算法设计的要求减少较多,说明,RW算法是符合设计要求的;同时权值指数α的设置,使RW算法具有一定的环境适应性,使得RW算法更具灵活性,更能有效的运用于定位各类场景当中;但是,α的求值,需要进行大量的数据统计运算,使得算法的使用比较的复杂。下一步的要求就是:权值指数α的获取更加的便捷,同时考虑RW算法应用于移动节点定位。

表2 RW算法与各类算法性能比较
[1]Chintalapudi K,Iyer A P,Padmanabhan V N.Indoor localization with the pain[C]//Proceeding of MobiCom Chicago,Illinois,2010:173-184.
[2]Martin E,Vinyals O,Friedland G,et al.Precise indoor localization using smart phones[C]//Proceedings of ACM Multimedia,Firenze,Italy,2010:787-790.
[3]Tarzia S P,Dinda P A,Dick R P,et al.Indoor localization without infrastructure using the acoustic background spectrum[C]//Proceedings of MobiSys,Bethesda,Maryland,2011:79-81.
[4]张立立,钟耳顺.无线室内定位技术[C]//中国地理信息系统协会第八届,北京,2004:996-972.
[5]任丰原,黄海宁,林闯.无线传感器网络[J].软件学报,2003,14(7):1282-1291.
[6]容晓峰,杨娜.RSSI位置指纹的定位误差分析与仿真[J].西安工业大学学报,2010,30(6):574-578.
[7]彭宇,王丹.无线传感器网络定位技术综述[J].电子测量与仪器学报,2011(5):389-399.
[8]Brunato M,Battiti R.Statistical learning theory for location fingerprinting in wireless LANs[J].Computer Networks(S1389-1286),2005,47(6).
[9]Ito S,Kawaguchi N.Bayesian based location estimation system using wireless LAN[C]//Proceedings of the Third InternationalConferenceonPervasiveComputingand CommunicationWorkshops.KauaiIsland,Hawaii,USA:IEEE,2005.
[10]陈永光,李修和.基于信号强度的室内定位技术[J].电子学报,2004,32(9).
[11]Zhao J,Zhang Y.Research on the received signal strength indication location algorithm for RFID systems[C]//International Symposium on CIT,2006:881-885.
[12]李奇.一种基于RSSI相关系数的指纹定位技术方法[J].广东通信技术,2013(3):29-32.
[13]汪媛卿,梁津垚,宋欣.基于距离权重的无线指纹定位方法[J].信息技术,2013(6):125-128.
[14]Liang Xiaomei,Gou Xuerong,Liu Yong.Fingerprint-based Location Positioning Using Improved KNN[C]//Proceedings 3rd IEEE International Conference on Network Infrastructure and Digital Conten,IC-NIDC 2012:57-61.
[15]方震,赵湛,郭鹏,等.基于RSSI测距分析[J].传感技术学报,2007,20(11):2526-2530.
Indoor localization algorithm research of environmental adaptability based on RSSI-weights.
CHEN Shunming,LI Ping
School of Computer and Telecommunications,Changsha University of Science and Technology,Changsha 410114,China
The localization node received signal strength indication value is one of important element for indoor fingerprint localization technology.This paper through analyzing the characteristic of the localization node received signal strength value,proposes indoor localization based on RSSI-weights algorithm.The raising of improved RSSI-weight calculation formula and the weights index make the localization algorithm have the environmental adaptability,apply more flexible to the actual location scene.After general experiment scene verification,this algorithm has a great improvement in location accuracy.
A
TP393
10.3778/j.issn.1002-8331.1311-0116
陈顺明(1988—),男,硕士研究生,主要研究方向为无线传感器网络;李平(1972—),男,教授,硕士生导师,主要研究方向为网络与信息安全、无线传感网和物联网。
2013-11-08
2013-12-06
1002-8331(2015)22-0099-05
CNKI网络优先出版:2014-04-03,http://www.cnki.net/kcms/doi/10.3778/j.issn.1002-8331.1311-0116.html
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
保健医苑(2021年9期)2021-09-08
小哥白尼(趣味科学)(2021年11期)2021-02-28
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
小天使·一年级语数英综合(2020年10期)2020-12-16
电气化铁道(2018年4期)2018-09-11
中国设备工程(2018年14期)2018-08-09
金色少年(奇趣科普)(2017年4期)2017-06-05
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
