
MEMS惯性测量组合在系统中的一种测试方法
2015-11-05 07:09创新者沈利华蔡燕斌
中国科技信息 2015年18期
创新者:杨 静 沈利华 蔡燕斌 石 磊
MEMS惯性测量组合在系统中的一种测试方法
创新者:杨 静 沈利华 蔡燕斌 石 磊
目前,MEMS惯性测量组合在我国航天器上处于应用起步阶段,工程中需要解决的实际问题还很多。本文提出的测试方法,针对MEMS惯性器件精度较低的特点,采用对惯组输出求模并进行一段时间均值计算,根据惯组精度选取合适的判据,在系统工作中可对惯组的多项指标进行检验。
综述
MEMS基本原理
MEMS(Micro Electro Mechanical Systems,微机电系统)是指可批量制作的,集微型机构、微型传感器、微型执行器以及信号处理和控制电路,直至结构、通信和电源等于一体的微型器件或系统。MEMS将电子系统和外部世界有机地联系起来,感受运动、光、声、热等自然界信号并转换成系统可处理的电信号,并进行放大、计算等处理,通过微执行器对外界发生作用。MEMS工作原理如图1所示。
MEMS惯组应用现状
MEMS惯性器件是指采用MEMS技术研制的陀螺或加速度计,它采用具有压电效应的微型传感器敏感到运动体的角速度与视加速度,通过信号处理和控制电路输出不同的电压。MEMS惯性器件一般以硅为主要材料,硅材料的强度与硬度与铁相当,密度类似铝,热传导率接近铝和钨,使器件可以达到较好的机械电气性能。同时,采用硅微加工工艺,在一定硅片上可以同时制造成百上千个完整器件,批量生产时可以大大降低成本。MEMS惯组则是采用MEMS陀螺与加表构建的惯性测量组合(下文简称惯组)。
目前,在我国的航天器上采用的惯组,其惯性器件多为挠性陀螺、激光陀螺、光纤陀螺、挠性加速度计、石英加速度计等,采用MEMS惯性器件构建的惯组刚处于应用起步阶段,工程中需要解决的实际问题还很多。例如:如何对MEMS惯组进行更有针对性的测试,以验证其是否满足使用要求;如何提高MEMS惯组的精度;如何加强MEMS惯组对力学、电磁、大气、核辐射等环境的适应能力等,以满足各种复杂工程条件的需求等。此外,还应加强对除惯性器件外其它MEMS器件的了解,把握MEMS技术发展现状,最后达到在航天器系统上大量使用MEMS器件,以最低的成本满足系统要求,解决航天器系统小型化、轻质化及低成本的问题。
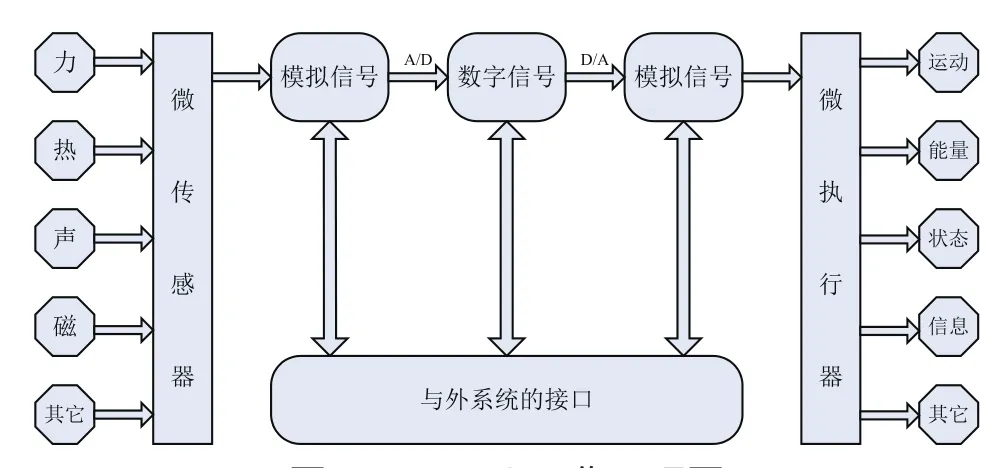
图1 MEMS工作原理图
本文提出的是MEMS惯组在控制系统中的一种测试方法,针对MEMS惯组单表精度较低的特点,采用对惯组输出的两种物理量分别求模,并计算一段时间内均值的方式,对惯组的零偏稳定性与零偏重复性同时进行检验,以达到在系统测试中对惯组指标进行验证的目的。
测试方案
在一些相关的国军标中,对于单独的陀螺仪与加速度计各项指标的测试方法均已进行过规定,如:零偏稳定性、零偏重复性、标度因数非线性度、标度因数重复性等。其中零偏稳定性一般指一次通电以后的零次项漂移值,也称零漂;而零偏重复性则是指在同样条件下及规定时间间隔内,多次通电零偏相对其均值的离散程度,可分为逐次启动重复性、逐日启动重复性。由于MEMS惯组本身具有零偏较大(单轴陀螺零偏可达100°/h以上),标度因数非线性较差(1000ppm)的特点,而且惯组在交付给系统使用之前已对各项指标进行过逐项测试,因此,本文所提出的测试方法,不对单项指标进行独立测试,而是针对MEMS惯组的整机进行系统静态测试,是一种可以验证惯组整机零偏特性(同时包含零次项漂移与逐次启动重复性)的测试方法。
测试条件
MEMS惯组由于其敏感器件的特殊性,其处理电路一般位于惯组内部最接近敏感器件的地方,多为A/D采集电路。故对外输出一般采用串口或其它数据总线接口,不同于传统惯组的多路脉冲输出。为对惯组进行测试,需要准备可供惯组工作的电源、可接收惯组输出数据并进行工具误差补偿的计算机、测试电缆。
测试方法
静态输出测试的测试方法为:将惯组静止摆放,对三轴输出角速度矢量与加速度矢量分别求模。对于精度较高的传统惯组,其输出测试值应为地球自转角速度(约15.041067°/h)以及当地的重力加速度go。对于精度较差的MEMS惯组,由于自身的单轴零偏已远远大于地球自转的角速度,可近似认为输出角速度的模反映了惯性器件的零偏。因此,选取合适的判据,则可以同时考核稳定性与重复性两项指标。
将惯组静置于固定基座上,当其输出稳定后开始进行测试。MEMS惯组一般采用线性模型,陀螺对于重力的敏感因素(g敏感系数)由于为极小量,一般不予考虑。
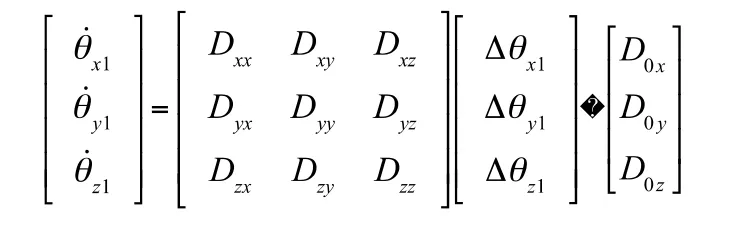
对陀螺的输出按照标定参数进行工具误差补偿,如下:

根据惯性器件的实际指标设置合格判据:
在国外,MEMS加速度计的精度指标已基本能满足战术导弹的应用要求,MEMS陀螺性能也已接近或达到战术级导航的水平,目前最高性能已达到1°/h,根据预测,MEMS陀螺性能极限约在0.01°/h。从需求来看,10°/h到0.01°/h的陀螺将可以满足将来一些低成本航天器的使用要求。
在国内,完全由拥有自主知识产权进行设计加工生产的陀螺零偏稳定性最好可达到50°/h,个别较好的器件已可以达到10°/h以内,但与国外相比还有一定的差距,其批量生产时性能的稳定性、器件的完好率都有待于提高。目前国内的研究在单个元件的设计、研制上,多传感器集成方面还有大量的工作要做。
例如,对于一台MEMS惯组,若其陀螺零偏重复性为100°/h(1σ),稳定性为50°/h(1σ);加表零偏重复性为1mg(1σ),稳定性为1mg(1σ)。则合格判据可设置为:

0.996536go≤A≤1.003464go,go为测试当地的重力加速度。
其中,∆θx1,∆θy1,∆θz1为从惯组串口输出的三个方向原始数字量,D0x,D0y,D0z为陀螺零次项系数,Dxx,Dyy,Dzz为陀螺刻度因子,Dxy,Dxz,Dyx,Dyz,Dzx,Dzy为安装误差。
对加表的输出按照标定参数进行工具误差补偿,如下:

其中,∆Wx1,∆Wy1,∆Wz1为从惯组串口输出的三个方向原始数字量,K0x,K0y,K0z为加表零次项系数,Kxx,Kyy,Kzz为加表刻度因子,Kxy,Kxz,Kyx,Kyz,Kzx,Kzy为安装误差。
设惯组的更新时间为τ,则惯组的每拍输出即为上一段τ时间内的角增量δθx,δθy,δθz与视速度增量δwx,δwy,δwz。
将每个τ时刻的角增量与视速度增量进行累加,若n·τ=1s,则每累加n次得到惯组在当前这1s内的平均角速度ωx,ωy,ωz,平均视加速度Ax,Ay,Az。
按下列两式进行求模计算,得到惯组输出的角速度ω(单位°/h)与加速度A (单位m/s2):

设置测试时长为60s,将60s的角速度之模与加速度之模分别进行累加并求得平均值:
结语
航天器控制系统正在朝着更小更轻更低成本的方向发展,而MEMS惯性器件以其制造加工工艺的不同而明显区别于其它惯性器件,具备小型轻质低成本的特点。随着我国MEMS器件的发展,未来必定会在航天器大量使用各种MEMS器件。本文所提出的MEMS惯性测量组合测试方法,是针对MEMS惯性器件精度较低的特点制定的一种简单有效的方法,在根据惯组指标选取合理的测试判据后,可以方便应用于控制系统对于MEMS惯组的测试验证。

杨 静1沈利华2蔡燕斌2石 磊
1.北京航天自动控制研究所;2.宇航智能控制技术国家级重点实验室
杨静(1981-)女,硕士,高级工程师,控制系统电气综合设计专业,主要从事控制系统弹地综合技术的研究;沈利华(1977-)男,硕研,高级工程师;蔡燕斌(1985-)男,硕研,工程师;石磊(1978-)男,硕士,工程师。
10.3969/j.issn.1001-8972.2015.18.019
猜你喜欢
数学物理学报(2022年5期)2022-10-09
昆钢科技(2021年2期)2021-07-22
现代经济信息(2020年34期)2020-06-08
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
职工法律天地(2018年12期)2018-01-22
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
空间控制技术与应用(2009年2期)2009-12-20
