基于可见光通信精确定位中接收端转动角度的二维研究
2015-11-16 09:04梁绣滟
电工技术学报 2015年1期
王 巍 梁绣滟, 王 宁
(1.天津工业大学电气工程与自动化学院 天津 300387 2.天津工业大学 大功率半导体照明应用系统教育部工程研究中心 天津 300387 3.天津工业大学 电子与信息工程学院 天津 300387)
1 引言
通过比较关于可见光室内定位的研究现状发现,相对于众多算法来说,目前比较有实践意义的可见光非成像定位方案,主要分为两个阶段:粗定位和精确定位。粗定位技术是将配备信号控制装置的LED灯发出的光的明暗变化作为ID信号发送[1]。精确定位则是在粗定位基础上确定接收端所在的具体坐标,常用的分析方法有三角测量法、情景分析法、接近法及VLC和Ad Hoc混合法[2]。三角测量法是最传统、应用最多的定位方法[2]。
目前人们研究定位算法的假定条件是发送端与接收端水平面法线互相对准且垂直于天花板,使得φi=ψi,其中,φi为发送端的辐射角,ψi为接收端的入射角,回避了实际应用中接收端角度改变对接收效果的影响,而当 φi=ψi时,势必会影响定位效果,导致接收端信噪比下降,缺乏实践意义。本文利用智能设备的加速器取得接收端平面改变角度情况下进行精确定位,提出了一种可以随意改变接收端的入射角角度而减小信噪比下降的方法,使得室内可见光通信定位系统便宜、实用且可实现。
2 系统设计及实现
2.1 视场角FOV限制和灵敏度限制
Krishnamurthy认为精确度在移动定位系统中是最重要的性能度量[4]。为了将系统性能最大化,通过经验分析和数据分析对可见光定位系统定义了两个词表征:视场角FOV限制和灵敏度限制[5]。如图1a被定义为可接收到信号的入射角最大值,物理上对接收端的视场角进行了限制,指接收机能够接收到从VLC发送端传送的VLID信号的范围。除了视场角限制(FOV limit),当接收的光功率低于接收端灵敏度( RXS),可接收范围由于信道直流增益的影响减小,接收范围效果会降低,只有当接收端的光功率 PR大于接收端灵敏度( RXS)时,才能在接收端将VLID进行恢复。
假定一组发送端和接收端的距离是 d,如图 1所示。这里φ关于发送端法线的辐射角,ψ是关于接收端法线的入射角,这些角度都是顺时针方向测量。当发送端信号不在接收端视场角 FOV范围内时,由于接收到的光功率急剧减小,接收端的灵敏度 RXS随之下降。

图1 发送端和接收端的方位角Fig.1 Azimuths of the sender and the receiver
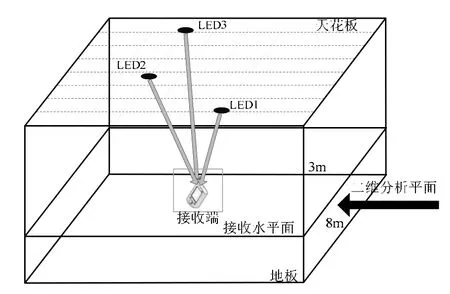
图2 实验环境中发送端和接收端的位置分布Fig.2 Positional distribution of the sender and the receiver in experimental environment
本文使用加速器来测量接收端平面在三维空间中的转动角度,验证接收端角度改变对接收端信噪比的影响,描述一种结合加速器的可见光通信室内定位设计方案,使得精确定位系统更加实用。
2.2 系统通信模型
假定LOS链路使用3个LED光源作为系统的发送端,接收端是安装有光电二极管和加速器的移动设备。发送端和接收端的位置分布如图2所示。基于朗伯模型的LOS链路信道直流增益[6]

朗伯系数m与发送端的半角发光功率有关,m的值大小决定光束的方向性,通常状态下取m=1,其表达式为[6]

式中,Φ1/2为LED辐射的半功率角,接收端探测器的物理面积为A;ψ为相对于接收端法线的入射角;φ为相对于发送端法线的辐射角,它们的关系如图1所示,T(sψ)、g(ψ)分别为关于光滤波器和集中器的函数;Ψc为接收端的视场半角(一般小于等于90°);d为发送端与接收端之间的距离。
当发送功率为PT,则接收端的光功率为PT=PRH(0)。由于 LED是朗伯光源的特性,因此有T(sψ ) g(ψ)=Gcos(ψ),G为关于滤波器和集中器增益的常数[7]。当 Φ1/2=6 0°,m=1时接收功率为

式中,C是关于LED、滤波器、集中器及光电二极管的物理特性。接收端的接收功率受散粒噪声的影响,其信噪比为

式中,Rp为光电二极管的灵敏度;为散粒噪声的方差值。
3 目标定位算法
发送端 Ti( i =1 ,2,3)安装在房间的天花板上如图2所示,将三维空间的坐标计算分配到二维场景中,利用正弦算法计算接收端的位置坐标。
假定3个发送端的坐标已知,且通过可见光通信将其地址发送给接收端 R,这可以通过时分复用技术(TDMA)实现[8]。di为发送端 Ti和接收端 R之间的距离,φi为发送端(i=1,2,3)相对于天花板法线的辐射角,令接收端在同一位置进行两次不同的转动的测量方式A和B进行定位研究,两次转动角度分别表示为θA、θB,对应的接收端入射角分别为ψi,Aψi,B,接收功率分别为Pi,APi,B,则φi,θA,ψi,A三者之间的关系如图3所示。
3.1 二维定位算法
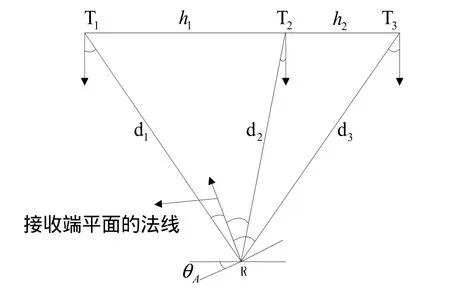
图3 测量方式A的发送端和接收端角度关系Fig.3 the angular relationship between the sender and the receiver in the measurement A
由图可推得两种转动情况A和B的三角之间的关系式分别为

同理有

上式中,转动角度θA、θB由接收端的加速器获得,使用光电二极管获得接收功率Pi,A、Pi,B,根据式(3)、式(5)和式(6)推得辐射角为φi[6]

由于本系统加速器的使用,因此在θA、θB已知。可见光传送地址信息时,由于通信媒介和发送及接收设备引起的噪声导致误差的产生,令为φi的估计值。接收端的坐标可通过三边测量方法得到,令h1为T1和 T2之间的距离、h2为T2和 T3之间的距离,在如图4由 T1、T2、T3构造的平面三角形中,采用正弦定理求得估算距离得
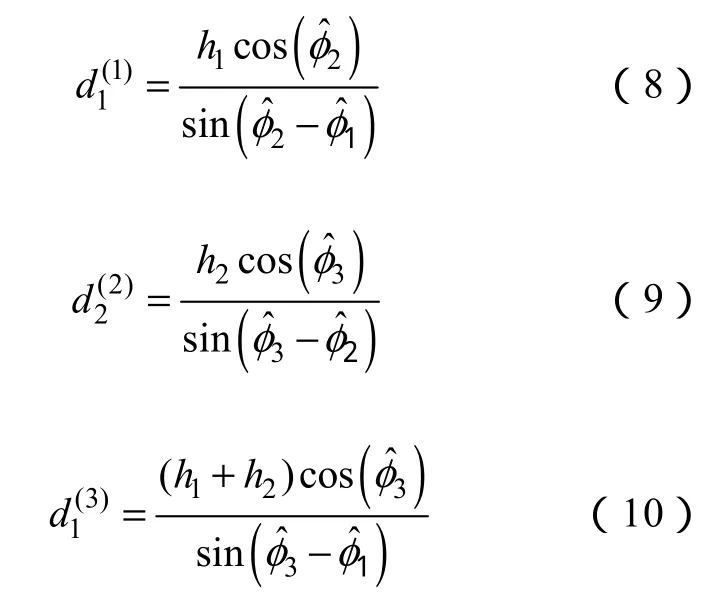
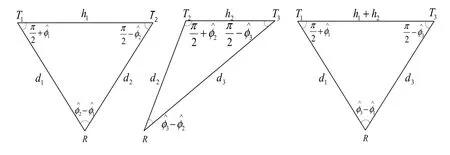
图4 T1、T2、T3构造的3个平面三角形Fig.4 Triangular configuration of three planes by T1、T2、T3
使用文献[8]的二维定位算法,在估算接收端位置时仅通过计算估算坐标的几何中心如式(11)所示[10]

3.2 实验仿真分析
通过以上分析,当系统没有噪声时,式(11)求得的坐标即是移动端的真实位置;考虑两种导致误差的因素:接收过程的散粒噪声和加速器的测量误差时,二维算法估算的目标坐标与移动端的实际位置存在误差,本节通过设定实验环境对定位误差做仿真分析。实验参数下表。
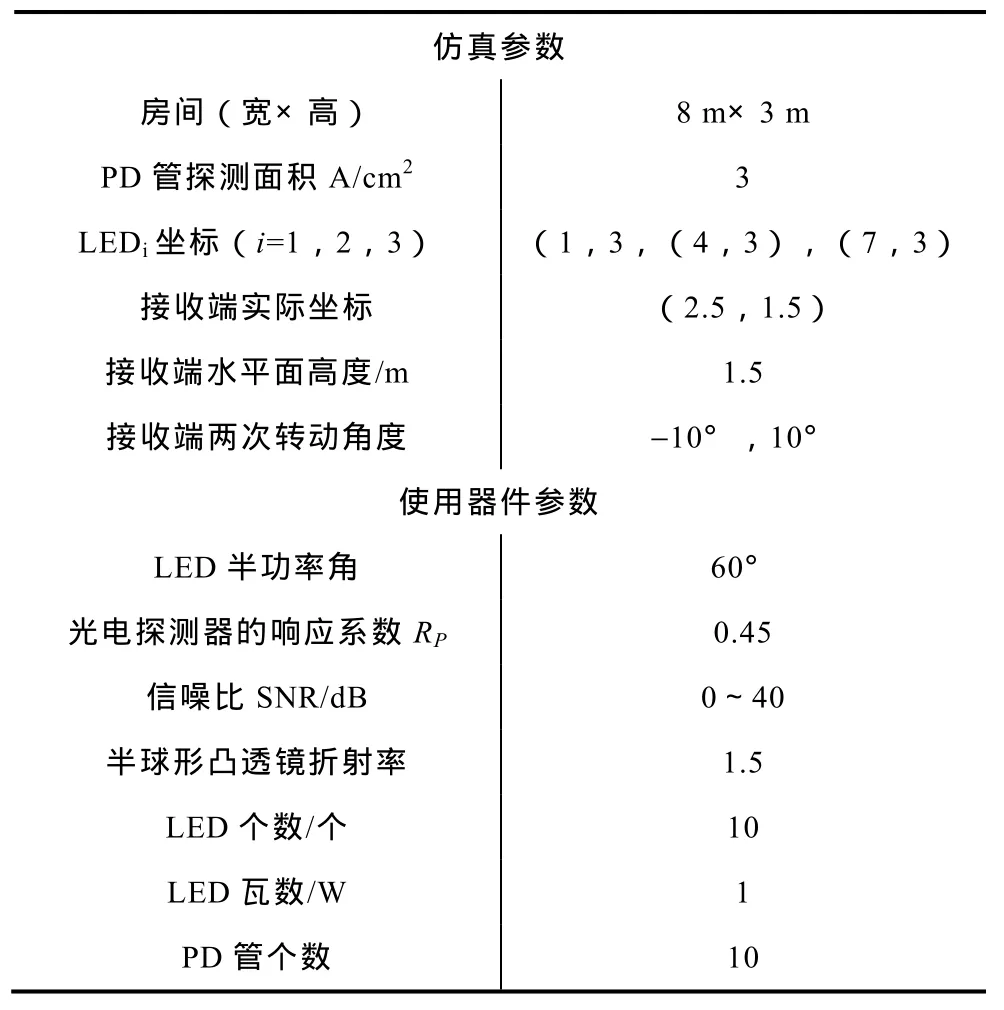
表1 实验环境参数Tab.1 Experimental environment parameters
根据对视场角FOV限制和灵敏度限制的分析,LED-ID的恢复需要满足对接收功率的要求,进一步需求接收面限制在视场角范围内。本文在接收端入射角在ψ∈(0,90°)范围内变化时对接收功率的影响进行了仿真如图5所示,可见随着接收水平面不断倾斜时,接收功率不断减小。
由式(4)得出接收功率与信噪比之间的关系如图6所示,从图中可以看出,考虑两个因素的增益后,可以接收更多的接收功率,接收性能有所提高。
本文介绍的算法在考虑滤波器和集中器的增益计算得到的接收功率和信噪比后,采用加速度传感器,从而在已知接收端平面转动角度的前提下进行二维定位算法,该算法的定位误差分析如图7所示,显示的是信噪比在10~40 dB时的定位误差,其中散粒噪声和加速器的噪声建模均为具有零平均值的高斯白噪声,则两者之和同样服从N(0,)。假定接收端在房间内的坐标为(2.5 m,1.5 m),接收端的转动角度分别为θA=−10°,θB=10°,则接收端位置定位误差约为10 cm。

图5 接收平面入射角ψ与接收功率PR关系图Fig.5 incidence angle in receiver side ψ vs the received power

图6 信噪比SNR与接收功率PR的关系(细实线为考虑滤波器和集中器,粗’o’和’*’线表示未考虑两个因素)Fig.6 the relationship between SNR and the received power PR
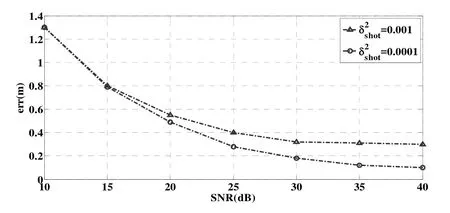
图7 信噪比与定位误差的关系Fig.7 relationship between with the positioningerror and SNR
4 结论
一般在文献中有两个假设:①接收端对地的距离是固定且已知的;②发送端和接收端的轴对齐且都垂直于屋顶。这两种假设是不切实际的,且不能在实际中得到保证。本文的精确定位算法旨在提出一种没有以上限制条件情况下的精确定位解决办法。针对接收端转动角度的偏移,提出了在实际情况中使用接收端进行精确定位过程中,视场角FOV(ψc)限制和灵敏度(RXS)限制两个因素对可见光精确定位的影响。如今大多数的智能手机和平板电脑都内置了加速传感器,这种普遍性的装置可以与可见光室内定位系统相结合,借鉴目前移动设备的加速度传感器用来测量接收端转动角度,在该转动角度已知的条件下,引入二维定位算法进行精确定位,定位误差仅为厘米级。
[1] 陈灿峰,谭伟.一种基于可见光信标的室内定位系统及实现[J].计算机工程与应用.2015,51(5):82-87.
Chen Canfeng,Tan Wei.Visible light communication based indoor positioning system.Computer Engineering and Applications,2015,51(5):82-87.
[2] 许银帆,黄星星,等.基于 LED可见光通信的室内定位技术研究[J].中国照明电器,2014,4:11-15.
Xu Yinfan,Huang Xingxing,et al.Research on indoor positioning algorithm based on LED visible light communication[J],China Light & Lithting,2014,4:11-15.
[3] Luo Pengfei,Zhang Min,Zhang Xiang,et al.An indoor visible light communication positioning system using dual-tone multi-frequency technique[C].2013 2nd International Workshop on Optical Wireless Communications:25-29.
[4] Krishnamurthy P.Position location in mobile environments[C].Proc.NSF Workshop on Context-Aware Moble Database Management,Providence,RI,Jan.2002.
[5] 6-Axis sensor assisted low complexity high accuracyvisible light communication based indoor positioning system.
[6] Komine T,Nakagawa M.Fundamental analysis for visible light communication system using LED lights[J].IEEE Transactions on Consumer Electronics,2004:100-107.
[7] Zhang W,Kavehrad M.A 2-D indoor localization system based on visible light LED[C].Photonics Society Summer Topical Meeting Series,2012:80-81.
[8] Jung Soo Yong,Hann Swook,Park Chang-Soo.TDOA-based optical wireless indoor localization using LED ceiling lamps[J].IEEE Transactions on Consumer Electronics,2011,57(4):1592-1597.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
大学物理实验(2022年6期)2022-03-03
青少年科技博览(中学版)(2021年9期)2021-12-21
科学技术创新(2021年25期)2021-09-11
中学数学研究(广东)(2019年12期)2019-07-18
中国医疗设备(2019年1期)2019-01-15
弹箭与制导学报(2018年3期)2018-08-28
传感技术学报(2016年6期)2016-09-09
语文世界(小学版)(2015年12期)2016-01-22
电源技术(2015年2期)2015-08-22