新型多模块水下作业机器人
2015-11-23 06:34苗亮泽王莹莹胡华鹏
大众科技 2015年9期
苗亮泽 王莹莹 蒋 凯 王 宇 胡华鹏
(浙江海洋学院船舶与海洋工程学院,浙江 舟山 316022)
新型多模块水下作业机器人
苗亮泽 王莹莹 蒋 凯 王 宇 胡华鹏
(浙江海洋学院船舶与海洋工程学院,浙江 舟山 316022)
海底管线是海上油气田生产设施的重要组成部分,在海洋油气工业中发挥着重要作用,必须定期或适时对其进行检测以保障其安全运营。水下机器人(ROV)以其综合优势成为进行水下结构物检测的有效载体并被广泛应用。文章介绍了利用ROV进行海底管线检测的综合作业系统,以及其他方面的检测和工作。根据实践经验,对影响作业效果的因素进行了讨论。
水下机器人;水下观测;推进器
随着对海洋资源的持续开发利用,海洋科学研究和技术开发也快速发展。海洋环境监测技术作为海洋科学技术的重要组成部分,为海洋科学研究、海洋环境监测、资源探测、海洋灾害预警提供全面的、多层次的海洋科学数据,对海洋经济发展、海洋环境保护、保护人类生命财产安全也具有非常重要的意义。海洋监测系统是海洋监测技术的重要组成部分,它主要由海洋台站、海洋监测浮标、海洋卫星和海洋测报船等组成。我国海洋监测的方式按照海洋监测系统的组成主要分为三类:近岸固定台站式观测,主要是连续监测海岸带的海浪、海温、潮汐、风暴潮以及海洋气象等海洋现象;对于 300 平方千米的大区域海洋监测采用的是投放海洋观测浮标的方式,以获取气象数据和海洋表层水文数据。
目前海洋无人智能监测平台的种类主要有:水下遥控机器人(ROV)、无人水下自主航行器(AUV)、无人自主表面船(USV)等,本作品则是研究水下遥控机器人,使其实现海洋智能监测,并实现海下取样工作。
1 总体设计
自主设计制作的小型有缆水下机器人。首先根据设计目的、工作需求利用Solid Works对ROV进行结构分析、零件建模、装配模型的数值模拟,并进行有限元分析及运动分析。再进行材料的购买,动手制作实物。此ROV主要由控制系统,推进系统,视频系统,作业系统四大系统组成。
主体参数:
(1)排水量:17kg
(2)最大作业半径:30m
(3)最大下潜深度:30m
(4)设计航速:1kn
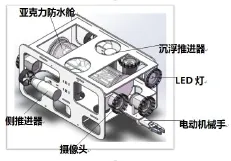
图1 ROV模块分布示意图
2 模块设计
2.1推进模块
推进系统使用的是自主设计研发的推进器,以两个沉浮推进器和两个水平推进器为主,推进器所用的电机型号为775电机。推进器采用的是特制的金属外壳来进行防水。沉浮推进器选用110mm合适口径的导流罩,以提升推进器的推进效率。两个沉浮推进器通过同向、同速、同功率来控制ROV的上升、下潜以及悬浮。而两个水平推进器则通过调节单个推进器的转向转速和功率进行差速运动控制,可以实现ROV前后运动及左右转弯,而且能做到原地360度旋转。具有多个自由度推进系统使ROV能在更加狭小与复杂的水下环境中工作。
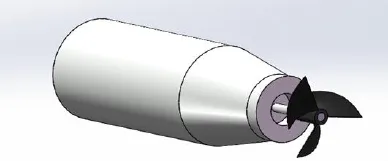
图2 推进器防水设计三维设计图
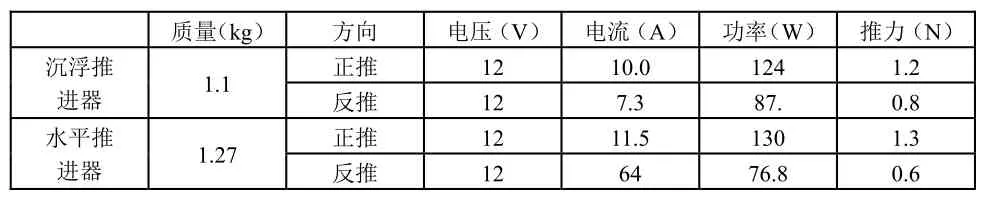
表1 推进器功率和推力测试
2.2视频模块
视频系统主要由四个高清摄像头,LED灯以及控制箱上的显示屏组成。四个摄像头分别观测机器人前方、上方、后方和机械手工作区域。采用同轴线传输视频信号,利用一条视频线同时传输四个视频信号。同轴线视频传输与双绞线相比具有抗干扰能力强,数据稳定,安装费用低,维护成本低,安装简单,扩充方便。能够较为及时的将信号传至控制系统。控制箱内的显示屏可同时显示四个图像,也可放大单个图像并相互切换。从而清晰地观测水下场景,方便ROV进行作业。摄像头和LED灯均安装在亚克力防水外壳内,其良好的防水性能可以保证该系统的正常运行。另外此ROV还可以搭载一些水下环境监测的其它仪器,例如水温测试仪、水质监测仪等。
周边的各地区都想发展当地经济,但许多项目扎堆建设,缺乏管理规划。洞庭湖地区虽然各种资源丰富,文化底蕴雄厚宜打造文化之旅,旅游相关配套设施正在建设,但招牌口碑未形成集群,对游客吸引力欠缺。同时当地居民缺乏科学保护观念,开发同时造成了生态的破坏,加之受周围河湖气候变化和人类活动等的影响,低枯水位期提前,年入湖水量大幅减少,萎缩日益明显;化学肥料排放增加,“三农”问题突出,湖体自净能力降低,水质呈中营养状态,居民饮水安全受到严重威胁;同时基础设施滞后,地方财力薄弱,镇化水平不高,使湖区变成相对落后地区。
2.3作业模块
ROV的电动机械手采用减速电机作动力,通过齿轮螺杆传动来完成夹持动作。气动式和电动式的都是自带动力的,气动式的需要气源,必须要有空压机或者有空压机站供给气源。而电动式机械手则不需要气源,比起气动机械手使用更加方便、省力,控制上更加稳定。
机械爪采用双曲柄的平行四边形机构,这种机构的对边长度相等,组成平行四边形,整个转动副均为整转副。当杆1作等角速转动时,杆2也以相同角速度同向转动,连杆3则作平移运动,以实现机械手的张合。
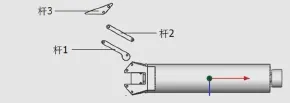
图3 机械手设计原理示意图
通过控制机械手开合,可以实现水下抓取,采集样本、打捞和辅助管道铺设等任务。机械手通过缆线与下位机相连,通过上位机的电位器可以控制机械手的张合,还能调节张合的速度快慢。
2.4控制模块
控制箱中显示屏、控制面板均由尼绒柱进行固定。控制箱的右侧开孔以供与水下机器人线路连接。
控制面板包含五个电位器旋钮(上左控沉浮推进器、上中控LDE灯、上右控机械手、下左控左推进器、下右控右推进器),另外还有两个按钮开关(左:上位机,右:下位机)和一个钥匙开关(沉浮与侧推)进行供断电。控制箱内部含有视频四路分割器、四路视频复用器、排插、12V转5V变压器、四块3S锂电池,上位机。
3 应用展望
3.1降低海底检测难度
ROV检测技术是水下无损检测技术的重要手段,它极大丰富了水下无损检测技术的内容。海上油气开采深度增加和水下作业难度的提高对水下无损检测技术提出越来越高的要求,ROV检测技术将是水下无损检测技术的主要发展趋势。随着现代科学技术的发展,ROV检测技术将推陈出新,日臻成熟,在海洋工程结构的水下无损检测中有着广阔的应用前景。而该系统搭载的定位系统可准确定位出ROV工作区域,并实时监测ROV的工况,避免出现事故。
3.2可应用于海底管道铺设与监测
在湖泊水库检测时, ROV进行水下部分的检测,保障水库水下建筑的安全性,对湖泊地势评估。ROV对水质的检测保证了饮用水的安全。目前国家正在大力开发海洋资源,设计出这种小型即可进行水下检测,又可以辅助管道铺设的水下机器人,对水下资源的开发利用有极大的帮助,尤其是在油气资源充足的地方,水下管道的铺设与检修将是工作的重中之重。
4 控制方式的创新
水下机器人的运动控制是实现其水下作业的关键,也是底层控制系统的重要部分。本机器人可实现下沉、上浮、前进、后退、左转和右转三个自由度的水下运动,使用价廉实用的开发板,自己编程控制将程序拷入开发板,通过电位器控制机器人的水下运动以及机械手的工作。摆脱了传统的电脑控制方式,将控制程序拷入开发板中自制控制箱,方便控制。
5 结语
ROV可以搭载测量模块进行水下检测,通过多个摄像头观测水下状况,还可以用机械手的夹取动作完成简单的样本采集。打捞物品时由ROV进行水下探测,确定作业的确切位置,并进行周遭环境探测。ROV的沉浮和水平推进器协同运作,操作人员通过控箱上的显示屏控制机器人的运动。运动至需要检测位置,水平推进停止运作,控制沉浮推进器推力实现机器人在水中悬浮。机械手张合能够稳固的夹取物件,撷取样本。并将物件放至合适的位置。若发现需打捞物品,可直接由ROV利用机械手夹持,将所需物品捞回岸上。

图4 ROV实物图
本作品亦可运用于海洋监测。其不仅可以运用于水上检测,对于海洋监测也具有天然的优势。ROV具有灵活的大深度水下运动能力,装备先进的水下动力、控制和机械系统,能在潜水员不能到达的深度与不安全的环境下进行水下检测和其它水下作业。ROV检测技术以其经济、安全、工作效率高、作业深度大,并能在恶劣的环境下作业等优点,在海洋工程结构的水下无损检测中得到广泛重视。同时,海洋石油工业正在向深海区域发展,对水下无损检测技术提出了更高的要求,为了提高效率,降低成本,海洋工程结构的水下无损检测越来越趋向于使用ROV检测技术。
[1] 李岳明.多功能自主式水下机器人运动控制研究[D].哈尔滨:哈尔滨工程大学,2012.
[2] 刘建成,万磊,戴捷,等.水下机器人推力器容错控制技术的研究[J].机器人,2003,(2):2-3.
[3] 金志贤.水下机器人推进器故障诊断技术研究[D].哈尔滨:哈尔滨工程大学,2006.
[4] 吴家鸣,郁苗,朱琳琳.带缆遥控水下机器人水动力数学模型及其回转运动分析[J].船舶力学,2011,(8):7-9.
New type of underwater robot more modules
the offshore pipeline is an important component of the offshore oil and gas production facilities, plays an important role in the Marine oil and gas industry, must be tested on a regular basis or for its timely in order to ensure its safe operation. Underwater vehicle (ROV) with its comprehensive advantages become effective carrier of the detection of underwater structures and widely used. This paper introduces the use of the ROV for subsea pipeline detection of integrated operation system, and other aspects of testing and work. According to practical experience, discussed the factors affecting the operation effect.
Underwater robot; underwater observation; propeller
TE5
A
1008-1151(2015)09-0018-02
2015-08-13
浙江海洋学院2015年度大学生科技创新项目(XJ201521)。
苗亮泽(1996-),男,河北邯郸人,浙江海洋学院船舶与海洋工程学院学生,从事船舶和水下机器人方面的研究。
猜你喜欢
舰船科学技术(2021年12期)2021-03-29
制造技术与机床(2018年11期)2018-11-23
当代陕西(2018年12期)2018-08-04
河北农机(2017年12期)2018-01-20
琴童(2017年7期)2017-07-31
制造技术与机床(2017年4期)2017-06-22
小学科学(2017年5期)2017-05-26
通信电源技术(2016年1期)2016-04-16
学习月刊(2015年10期)2015-07-09
中国船检(2013年10期)2013-08-15