
Slope RMS在三镜支撑设计与面形评价中的应用
2015-11-24 03:27李明璇张景旭陈宝刚
激光与红外 2015年11期
李明璇,张景旭,陈宝刚,杨 飞
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
·红外技术及应用·
Slope RMS在三镜支撑设计与面形评价中的应用
李明璇1,2,张景旭1,陈宝刚1,杨 飞1
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
针对镜面面形均方根(RMS)无法反映表面面形的空间频域特性,借鉴了国际上先进的斜率均方根(Slope RMS)作为面形评价方法。本文以2 m级望远镜三镜作为例子,将Slope RMS作为优化目标函数,计算了支撑点的位置,给出的支撑之后面形误差RMS值为6.88 nm,在空间间隔为0.25 mm时的Slope RMS值为0.17809 μrad。利用Zernike多项式作为面形拟合基底函数,将对成像质量没有影响的刚体位移从面形误差中分离出来,得到最终的面形误差的RMS值为3.30 nm,在空间间隔为0.25 mm时的Slope RMS值为0.15943 μrad。研究结果表明,以Slope RMS为目标函数优化支撑点的支撑结果位置满足光学设计的要求,对更大口径光学元件的支撑设计提供了一种指导方法。
斜率均方根;三镜支撑;泽尼克多项式;面形拟合
1 引 言
随着近年来光电设备的系统口径不断增加,相应的光学元件表面形状误差的评价与检测的难度越来越大。在中小口径的光学系统中,普遍采用表面均方根(RMS)作为光学元件的面形评价方法。但是对于面形误差频域特性越来越复杂的大口径光学元件,对于某一定值的RMS,可能具有不同的频域分布,进而导致了对于后续光学系统的影响也不尽相同。另一方面,由于RMS不具有频域特性,其结果很难与系统传函数、点扩散函数以及结构函数等广泛使用的评价方法进行联系。
基于以上原因,实际应用中就很需要一种能够反映频域特性的评价方法。斜率均方根(Slope RMS)是近年来由国外的研究人员提出的用来评价大尺度的表面起伏,可以更加详尽地反映光学表面的面形特征。
望远镜的第三反射镜的主要功能是折转光路,在工作状态下,三镜的面形将影响最终的成像质量,要求由支撑带来的面形误差尽可能地少,所以要对支撑点位置进行优化,寻找到最佳的支撑点的位置[1-4]。
在本文中,首先对于描述了2 m级望远镜三镜的具体工况,提出了所要优化的具体问题;之后基于Zernike多项式,以及斜率均方根对于三镜支撑点进行了优化设计计算。最后对于该三镜的面形误差的Slope RMS值为0.17809 μrad,RMS值为6.88 nm;在去除掉piston和tip/tilt之后的面形误差的Slope RMS值为0.15943 μrad,RMS值为3.30 nm。
2 Slope RMS与三镜的支撑点优化
采用RMS评价镜面面形,会忽略掉面形误差的频域性质。近年来,斜率均方根(Slope RMS)被提出以更好地表征镜面上的频域能量分布,更加适用于大口径的光学镜面的评价。Slope RMS的定义为:

(1)
(2)
由图1可知,在空间频率较为小时,Slope RMS值随其增大而迅速下降,当空间间隔大于一定数值时,Slope RMS值变化放缓,此时的空间频率称为截止频率。

图1 不同空间间隔下的Slope RMS值
2.2 三镜支撑点设计

表1 三镜尺寸参数(单位:mm)
在确定轴向支撑点的数目时,应用经验公式计算得出满足面形精度要求时的最少支撑点数目。Hall在1970年给出的最少支撑点数目计算公式为:
记录传统形心算法和窗宽自适应形心修正算法对同一波形的仿真结果,再将其与真值的差作为误差.仿真基于10 ns脉冲宽度,ADC采样率为2G SPS,ADC的量化输入范围是0~400 mV,两种算法对饱和度在50%~1 000%的波形在不同的信噪比(Signal-to-Noise Ratio, SNR)条件下分别进行5 000次仿真,分析算法的精度,统计在不同饱和度和SNR条件下的最大误差,SNR指ADC输入量化范围和噪声比值.
(3)
其中,N为最少支撑点数目;DG,tA,ρG,EG分别为反射镜的直径、厚度、密度和弹性模量。取δ=5 nm为可接受的镜面变形量时,计算得到N=2.71,即最少需要3个轴向支撑点支撑。
刚体在自由状态下拥有6个自由度,反射镜的支撑要在不过定位的状态下完全约束住这些自由度,且在任意位姿都能够满足受力平衡条件:
(4)
三镜支撑要恰好满足以上方程,所以三镜的底支撑与侧支撑之间要相互独立[11-12]。其中,在底支撑的侧向采用了柔性环节,使它的侧向刚度远远低于其轴向刚度,这样可以放开底支撑上的侧向的自由度,单一的底支撑限制住了Uz方向的自由度,三个底支撑联合在一起可以限制Rotx和Roty向自由度;侧支撑的膜片结构可以保证垂直于膜片表面的轴向刚度远远低于平行于膜片表面的侧向刚度,即在侧支撑上放开了底支撑方向的自由度,限制住了Ux、Uy和Rotz方向的自由度。底支撑和侧支撑之间没有相互耦合,并恰好完全约束住了反射镜的刚体自由度,达到了支撑的要求。
2.3 三镜支撑点优化
以Slope RMS作为镜面面形优化的目标函数,优化过程的设计变量为L1、L2、L3。取镜面变形最大时的工况,即重力垂直于镜面向下,优化问题的数学描述为:
minf=f(L1,L2,L3)
(5)
本文采用ANSYS中的OPT模块进行分析,采用APDL参数化建模语言建立镜面模型,并用Solid45单元对镜体进行网格划分,求解设计变量L1,L2,L3的最优值。在优化分析时,为了模拟镜子在支撑时的受力情况,将边界条件设置为:约束底支撑孔的下边线Uz,Rotx和Roty方向的自由度,约束侧支撑膜片对应镜体处结点的Ux,Uy和Rotz方向的自由度。再在垂直于镜面向下的方向添加重力加速度,模拟镜子水平放置时的工况。求解时以镜面面形的Slope RMS值为优化目标,最终的设计变量最优值为:L1=98.93 mm,L2=63.29 mm,L3=62.10 mm;此时的镜面面形的Slope RMS值为0.17809 μrad,RMS值为6.88 nm。图2为最终的面形云图。

图2 表面变形云图
3 采用Zernike多项式分离低阶相差
3.1 Zernike多项式
理想的光学表面都是光滑且连续的,而从有限元分析中导出的光学表面上结点的坐标与其位移是离散的。在后续的分析中,需要将这离散的点拟合为光滑连续的表面,称之为镜面拟合,并且普遍使用的是Zernike多项式法。镜面的面形误差可以分为很多类型,有的对最终成像影响不大,Zernike拟合面形可以连续的面形误差给予分类与分离,离散出不同的面形误差类型。通过忽略掉对成像影响较小的面形误差,可以降低对镜面加工和镜体支撑的要求[13-15]。
在镜面拟合中,Zernike多项式具有如下的优点:
(1)Zernike多项式在单位圆上正交。

(6)
(2)与Seidel相差具有相关性,Zernike多项式的直角坐标下表达式和各项数意义如表2所示。
(3)多项式中的各项物理意义明确且线性无关,能够作为结构分析与光学分析之间的接口。
在直角坐标系下N阶Zernike多项式的表达式为:
=a1Z1(x,y)+a2Z2(x,y)+…+aNZN(x,y)
(7)
其中,Zi为Zernike多项式中的第i项;ai为它的系数;x,y是数据点的坐标值。由于本例镜子支撑点较少,由支撑带来的像差的阶数不会很高,所以选用10阶精度已经达到要求,可以对镜面进行拟合。
3.2 拟合分析过程
将此前的分析数据导出并进行归一化,即将结点坐标归一化至单位圆内。归一化之后的结点坐标x=x/a,y=y/b。将归一化之后的结点坐标进行均匀化差值,使其在单位圆域内均匀分布。即可计算Zernike基底函数和Zernike多项式系数。
由于重力的方向为垂直于光轴向下,即主要的变形产生与z方向,x与y方向的变形引起镜面高度的变化是由泊松比引起的,可以忽略不计。将得到xi、yi和ΔZi(i=1,2,3,…,k,k为镜面结点的个数)代入N阶Zernike多项式中去:
(8)
以上表达式可以简写为:Za=ΔZ。
其中,Z为n×k矩阵,a=(a1,a2,…aN)T,ΔZ=(ΔZ1,ΔZ2,…,ΔZN)T。经过计算得到Zernike多项式前10阶的系数如表2所示。
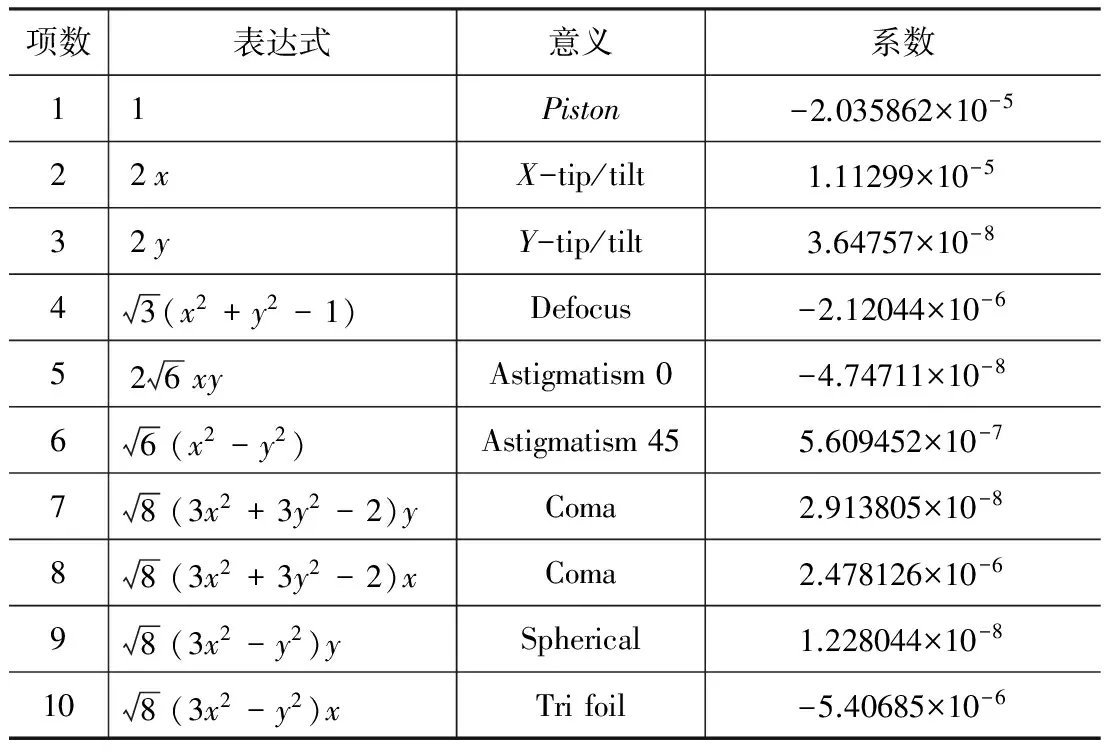
表2 Zernike多项式在直角坐标下的表达式、意义和拟合系数
在三镜的支撑系统中,设置有相应的调整环节,Zernike多项式中的前三阶相差(光轴的方向平移和关于x,y轴的旋转)是可以消除掉的。根据此前计算的Zernike系数,可以计算得到除去低阶像差后的面形评价如表3所示。图3(a)是经差值与归一化之后的镜面面形,图3(b)是去除刚体位移之后的镜面面形云图。

表3 拟合结果分析

图3 经归一化插值与除去低阶像差后的镜面面形
之后,针对不同空间频率计算得到镜面面形误差的Slope RMS和RMS值。
从图4和图5对比得出,Slope RMS随着空间间隔的变化而变化,可以反映有关空间频率频率的信息,而RMS值不能反映空间频率的信息。本文以三点支撑的三镜作为分析例子,而去除掉刚体位移之后的三点支撑的面形还存在着大量诸如离焦和像散等其他种类的像差。在30 m望远镜(TMT)中,由于主镜采用拼接形式的主动光学,在三镜的Zernike拟合面形中,低阶的像散可以一并除去,最终能够达到非常好的面形结果。接下来的工作是以更大口径的望远镜三镜作为设计优化目标,并以Slope RMS作为优化时的目标函数和最终的面形评价标准,带来更多的工程应用。
5 结 论
本文针对RMS在面形评价中会忽略掉其空间频率特征的缺点,提出了采用Slope RMS作为面形评价方法,并以两米级望远镜的第三反射镜作为例子,优化设计了其支撑点位置,在空间间隔为0.25 mm 时得到最优解的面形误差Slope RMS值为0.17809 μrad,RMS为6.88 nm。
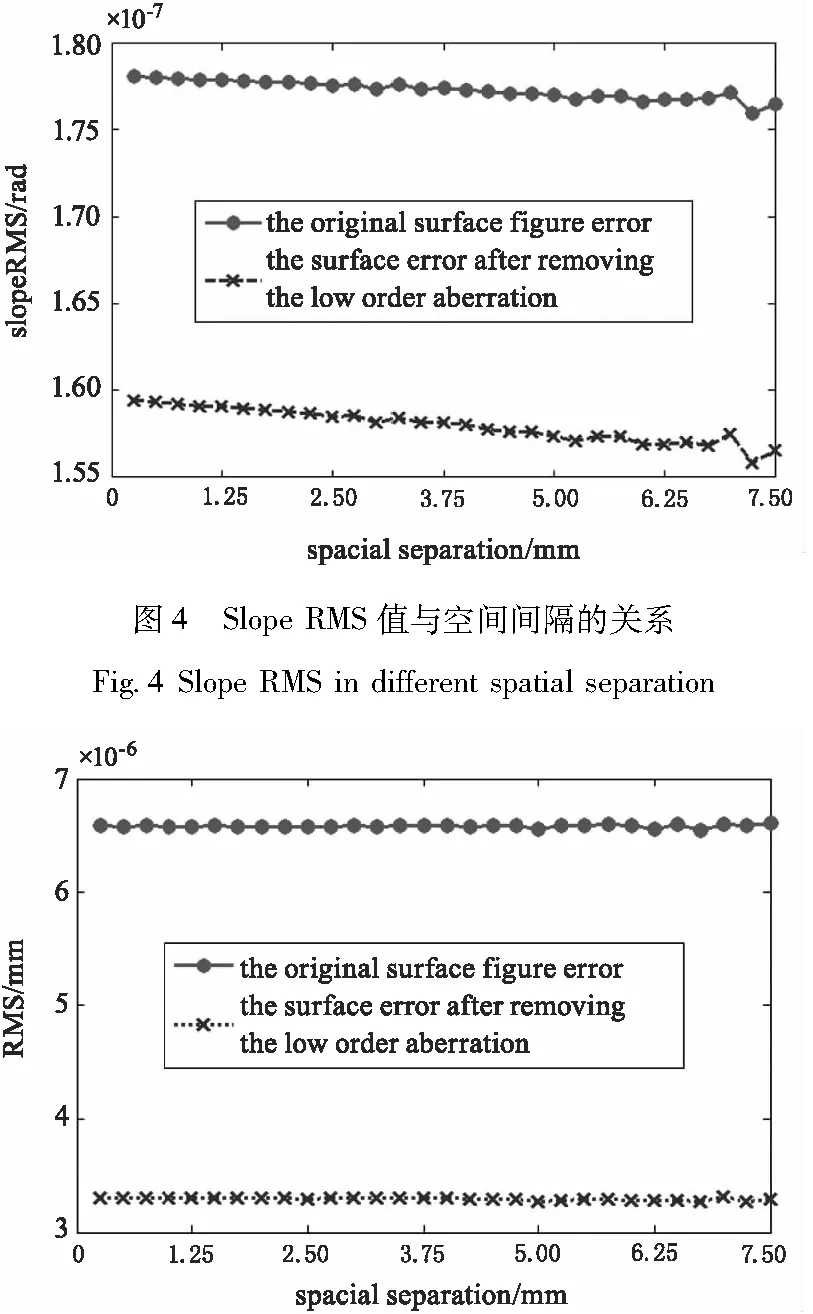
图5 RMS值与空间间隔的关系
联合Zernike多项式函数对面形模拟分析,将面形误差离散分离,通过去除掉可以通过装调改正的低阶相差,在空间间隔为0.25 mm时的最终面形误差Slope RMS为0.15943 μrad,RMS为3.30 nm。为更大口径的光学元件的支撑设计与面形评价提供了一种可行的方法。
[1] CAO Xiaotao,SUN Tianyu,ZHAO Yunlong,et al.Current status and development tendency of image stabilization system of large aperture space telescope[J].Chinese Optics,2014,7(5):739-748.(in Chinese)
曹小涛,孙天宇,赵运隆,等.空间大口径望远镜稳像系统发展现状及趋势[J].中国光学,2014,7(5):739-748.
[2] Wolfgang Dierking.RMS slope of exponentially correlated surface roughnessfor radar applications[J].IEEE Transactions on Geoscience and Remote Sensing,2000,38(3):1451-1454.
[3] XUE Jun,HU Haibing,SONG Hanzhong.Research on the flexible supporting structure of the optical reflector[J].Journal of Changchun University of Techonology:Natural Science Edition,2009,30(4):457-461.(in Chinese)
薛军,扈海滨,宋汉忠.光学反射镜挠性支撑结构研究[J].长春工业大学学报:自然科学版,2009,30(4):457-461.
[4] FU Liangliang,HE Xin,LIAN FenghuiH.Design and analysis of minitype reflected mirror supporting structure project[J].Optical Technique,2008,34(4):532-534. (in Chinese)
付亮亮,何欣,廉凤慧.小型反射镜支撑方案的设计与分析[J].光学技术,2008,34(4):532-534.
[5] XU Wei,ZHANG Limin,LIU Changhua.Support design of M3 based on the kinematic method and optimization of the support position[J].Journal of Mechanical & Electrical Engineering,2014,31(12):1574-1577.(in Chinese)
徐伟,张丽敏,刘昌华.基于运动学原理的三镜支撑设计及支撑位置优化研究[J].机电工程,2014,31(12):1574-1577.
[6] Martin Cullum,Jason Spyrommilio.Thermal and wind control of the VLT[J].Proc.SPIE,2000,4004:194-201.
[7] ZHU Shuo,ZHANG Xiaohui.Application of error detaching to ritchey-common test for flat mirrors[J].Editorial Office of Optics and Precision Engineering,2014,22(1):7-12.(in Chinese)
朱硕,张晓辉.误差分离技术在平面镜瑞奇-康芒法检测中的应用[J].光学 精密工程,2014,22(1):7-12.
[8] Ulrich Lampater,Terry Herter,Paul Keas .Preparation of the pointing and control system of the SOFIA airborne telescope for early science missions[J]. Proc.of SPIE,2010,7733:77330S.
[9] ZHAO Hongchao,ZHANG Jingxu,YANG Fei,et al.Preloading eight-van spider for supporting structure of secondary mirror[J].Opt.Precision Engineering,2013,21(5):1199-1204 .(in Chinese)
赵宏超,张景旭,杨飞,等.预紧式八翼梁次镜支撑结构动力学分析[J].光学 精密工程,2013,21(5):1199-1204.
[10]Glaese R,Sheehan M.Vibration mitigation for wind-induced jitter for the giant magellan telescope[J].Proc.SPIE,2012,8444:8444OV.
[11]HAN Linchu,ZHANG Jingxu,YANG Fei.Summarization of lateral flexure support in large telescope[J].Laser & Infrared,2014,44(12):1306-1311.(in Chinese)
韩琳楚,张景旭,杨飞.柔性侧支撑在大型望远镜中的应用综述[J].激光与红外,2014,44(12):1306-1311.
[12]TAN Jinguo,HE Xin,LIU Qiang.Circumjacent support technique of minitype reflector[J].Laser & Infrared,2011,41(10):1136-1139.(in Chinese)
谭进国,何欣,刘强.小型反射镜周边支撑技术[J].激光与红外,2011,41(10):1136-1139.
[13]LU Qian,HUANG Weiqing,WANG Yin,et al.Optimization design of deep-notch elliptical flexure hinges[J].Optics and Precision Engineering,2015,23(1):206-215.(in Chinese)
卢倩,黄卫清,王寅,等.深切口椭圆柔性铰链优化设计[J].光学 精密工程,2015,23(1):206-215.
[14]YANG Jiawen,HUANG Qiaolin,HAN Youmin.Application and simulation in fitting optical surface with Zernike ploynomial[J].Spacecraft Recover & Rmmote Sensing,2010,31(5):49-55.(in Chinese)
杨佳文,黄巧林,韩友民.Zernike多项式在拟合光学表面面形中的应用及仿真[J].航天返回与遥感,2010,31(5):49-55.
[15]ZHANG Wei,LIU Jianfeng,LONG Funian.Study on wavefront fitting using Zernike polynomials[J].Optical Technique,2005,31:675-678.(in Chinese)
张伟,刘剑峰,龙夫年.基于Zernike多项式进行波面拟合研究[J].光学技术,2005,31:675-678.
Application of Slope RMS in the figure evaluation and support design of the tertiary mirror
LI Ming-xuan1,2,ZHANG Jing-xu1,CHEN Bao-gang1,YANG Fei1
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;2.University of Chinese Academy of Science,Beijing 100049,China)
As the Root-Mean-Square (RMS) cannot specify the spatial frequency of the mirror surface figure,the Slope-Root-Mean-Square (Slope RMS) is applied to evaluate the mirror surface figure.Taking the tertiary mirror of 2 m scale telescope as an example,Slope RMS was used to optimize objective function and the locations of supporting points were calculated.The obtained RMS of surface figure error is 6.88 nm,and the Slope RMS is 0.17809 μrad when the spatial separation is 0.25 mm equally.Using the Zernike polynomials as the foundation function of surface figure fitting,it can separate rigid body displacement which has less influence on the imaging quality from surface figure error,and the final RMS of surface figure error is 3.30 nm,and the Slope RMS is 0.15943 μrad when the spatial separation is 0.25 mm.The results of optimization can meet the design requirements,and it provides guidance for supporting design of large optical element.
Slope RMS;tertiary mirror support;Zernike polynomials;surface figure fitting
1001-5078(2015)11-1349-06
国家自然科学基金项目(No.11403022)资助。
李明璇(1990-),男,硕士研究生,研究方向为大口径望远镜三镜设计。E-mail:lmx325@163.com
2015-03-06;
2015-04-15
TH751
A
10.3969/j.issn.1001-5078.2015.11.013
猜你喜欢
大学数学(2022年6期)2023-01-14
航天返回与遥感(2022年3期)2022-07-07
数学小灵通·3-4年级(2022年5期)2022-06-01
快乐语文(2021年34期)2022-01-18
电子技术应用(2021年1期)2021-01-22
VOGUE服饰与美容(2019年10期)2019-12-02
航天返回与遥感(2018年2期)2018-05-17
中国公路(2017年15期)2017-10-16
百姓生活(2017年6期)2017-06-10
幸福家庭(2016年10期)2016-11-25
