
汽车线控转向硬件在环实验台研究现状综述
2015-11-28 10:13余颖弘王保华
湖北汽车工业学院学报 2015年3期
余颖弘,王保华
(湖北汽车工业学院汽车工程学院,湖北十堰442002)
转向系统作为“人-车”交换界面,其性能好坏直接影响汽车的操纵稳定性、驾驶舒适性及行驶安全性。线控转向作为转向技术发展的必然阶段,特征表现为:通过电信号传递控制取代了方向盘与转向执行机构间的机械部分,以获得更稳定、更安全、更舒适、更智能的转向系统。
线控转向硬件在环实验台作为介于虚拟软件仿真和实物实验之间的重要实验方式,在获得高仿真度的同时,还可以灵活的进行一些实际中不可能或不易进行的实验,如故障模拟、故障诊断、软件测试及紧急状况处理等。通过相对更安全的台架实验,可以测试得到线控转向系统的各项参数及主要性能指标,进而对线控转向控制算法进行设计和改进,提高系统可靠性。
线控转向实验台需要满足下述功能:1)SBW系统驾驶员路感特性研究;2)SBW系统控制策略研究;3)系统中相关电机控制策略及算法验证;4)系统故障诊断策略研究与验证;5)模拟动画实时显示;6)模拟不同工况下的阻力。线控转向实验台不仅要为线控转向研究提供复杂的模拟、检验、调整以及验证平台,还需为实验人员提供真实的驾驶体验,以实现“人-车-路”的实时闭环仿真平台。
1 国内外现状
随着计算机技术的发展,线控转向及线控转向实验台逐渐成为当今汽车行业与科研机构研究的热点。由于西方国家针对线控转向的理论研究及概念机研发起步较早,故在线控转向实验台的研究领域也较为深入,目前已取得了一定实用性成果。
1.1 亚洲各国SBW实验台发展与现状
韩国汉阳大学[1]线控转向实验台主要由液压阻力模拟系统、实时控制器、线控转向系统等部件组成。通过电机实现路感模拟和转向操纵功能;液压系统用来模拟转向阻力;通过信号发生器模拟输入,反映车辆运行状态下的各类信号;利用数字信号处理器处理和分析各种输入信号,对系统进行实时控制;最终通过主控制计算机控制整个系统,分析各种反馈信息及向各驱动器发送执行指令,保证系统正常运行。此外,韩国Kwangju 科技学院[2]开发了用于EPS和SBW系统开发的硬件在环实验台,通过气缸模拟转向阻力。日本岩下(IEI)公司[3]设计开发的SBW系统硬件在环试验台。作为早期的线控系统硬件在环试验台,极富特色。该实验台不仅在结构上考虑了人机工程学,保证结构合理、可靠,还最大限度还原了驾驶员的驾驶环境;同时大量采用现代测量技术,使得实验台响应快、精度高,而且可以实时显示,直观明了。
1.2 欧美企业的SBW实验台发展与现状
为了满足产品设计和质量验证的要求,欧美多家著名汽车厂商及零部件公司也设计生产了满足个性化需求的电控转向实验台,并投入使用。其中BMW 公司采用了由IABG 公司为其设计开发的电控转向硬件在环实验台[4-6],该试验台采用dSPACE公司的Simulator等实时仿真工具,利用IPG 公司的整车动力学仿真软件CarsMaker/HIL;该试验台具有很强的通用性,可用于开发BMW 公司中所有级别车型的转向系统;区别于传统实验台该实验台增设故障注入试验以及定工况无人连续测验功能提高实验安全性。IPG 公司也开发了一套先进的电控转向系统硬件在环试验台[7],为了模拟不同路面环境不同试验工况下的转向阻力,该实验台采用了双直线电机模拟转向阻力。该设备不仅可以用于开发转向系统,还可以对转向系统进行系统或部件的机械特性进行测试,如转向系统的转动摩擦力矩,转向系统刚度、阻力曲线等,并可对转向系统进行疲劳性测试。ABD 公司开发的SSTM(Steering System Test Machine)系列转向系统测试试验台[8]由电脑控制,可对转向系统进行力矩及位移输入,通过准静态和动态试验对转向系统性能进行主观和客观评价。另外,奔驰、Daimler、ZF(采埃孚)等公司也成功研制出高性能的线控转向实验台,这些实验台在结构和测试方面都各具特色,根据现场实际操作情况及人机工程学针对实验台的结构进行设计,大量采用计算机测控技术进行相关测试工作,保证了测试精度高、检测速度快等要求,检测结果可实时显示。
1.3 国内SBW实验台发展与现状
近年来国内不少汽车企业及科研机构开始针对转向实验台的设计与开发,由于起步较晚,与国外仍存在差距,一定程度上制约了线控技术及其他转向技术的发展。但是,现阶段个别高校为验证所提出的线控转向控制算法及开发线控转向系统性能,设计研发了一批硬件在环转向试验台,但实验台的开发大多集中在高校中[9]。其中清华大学季学武教授的团队设计开发了电动阻力转向系统性能实验台,该实验台不仅能对EPS转向系统传感器进行标定,还可对其转向性能进行台架测试。测试结果对于EPS系统设计开发、传感器及控制器元件的选型等具有参考价值[10]。江苏大学汽车工程重点实验室已开发出转向轴驱动形式的轿车电动助力转向系统样机及相关硬件在环性能试验台,其样机已经完成台架性能试验和可靠性试验。北京理工大学和吉林大学联合开发了汽车电动助力转向硬件在环试验台,该试验台测试精度和效率均能满足试验测试要求,运行稳定可靠,适用于EPS系统的控制策略开发以及基本特性的测试。
2 硬件在环仿真实验系统
线控转向实验台包括硬件与软件平台(图1)。硬件平台主要由转向盘总成、转向执行总成、阻力模拟总成、数控采集系统、电机驱动系统、自动防故障系统、电源系统、各类传感器及机械结构组成;软件平台包括驾驶员模型、整车模型、控制器模型、驾驶工况等;搭建软件平台还需完成多自由度汽车动力学建模、控制策略设计、监控软件设计等。目前广泛借助第三方整车动力学软件ADAMS、TESIS DYNAware或CarSim与Matlab/Simulink或Lab-VIEW 建立联合仿真软件平台,软件平台和硬件平台集成,组成SBW系统硬件在环仿真实验系统。SBW试验系统设计要解决3个关键问题:1)转向实验台阻力模拟系统设计;2)线控转向实验台路感模拟系统设计;3)线控转向实验台仿真平台设计。
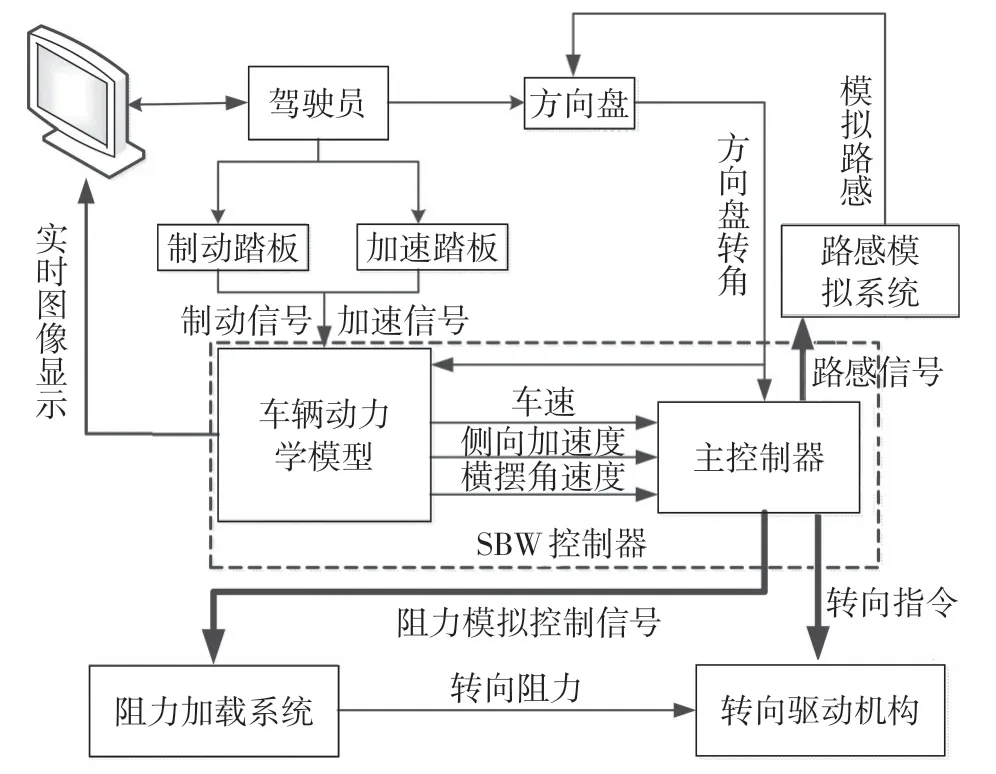
图1 线控转向试验台原理图
2.1 SBW实验台阻力模拟系统阻力加载方式
阻力的加载方式与路感模拟是硬件平台研究开发的重点。阻力模拟形式多样,典型的方式有弹簧加载式、千斤顶加载式、电液伺服式、磁粉制动式及电机加载式。不同阻力加载方式各有优缺点,可以根据功能需求选择不同方式,另外阻力加载电机的控制方法也不尽相同,如表1所示。
随着电机技术与控制技术的发展,加之其优秀的属性,以电机作为模拟转向阻力的形式已是大势所趋。阻力加载系统设计的工作重心则转移到电机选型、控制方法上。

表1 不同阻力加载方式比较
2.2 SBW实验台路感模拟系统
线控转向实验台的路感模拟复杂多样。结构形式上,基于不同的工作原理,大致有基于电机、磁流变液操纵杆、液压作用等多种结构形式提供力反馈[17];控制算法上,有基于车速、驾驶员意图以及车辆模型和观察器几种路感反馈方式[18];控制方法上,则包括经典控制方法和现代控制方法,其中经典控制方法又有反馈型与PID控制2种类型[19]。
宁波大学[20]利用双向扭簧与磁流变阻尼器串联形式为驾驶员反馈路感信息,通过测试磁流变阻尼器动静态特性、标定扭簧刚度,以控制励磁电流控制输出反馈力矩。由于磁流变阻尼器存在磁滞现象,重复跟随性较差,输出力矩控制难度较大。武汉科技大学[14]选用电机提供力反馈;研究人员基于驾驶员意图,根据吉林大学驾驶员模拟器(ADSL)的实验结果——我国驾驶员偏好力矩不超过5N·M[21]、CarSim不同车速下的力矩反馈仿真结果及相关安全管理单位规定的保持操纵稳定性的方向盘最小转速[22]选择了BLDC 电机作为路感反馈电机,并设计了综合反馈控制算法;基于CarSim和dSPACE实时仿真系统,进行了综合状态反馈控制仿真,结果表明在满足实时性的同时,综合反馈控制有效提高汽车的操纵稳定性。但此方案实验工况不够全面,可以针对不同工况进一步完善。
从控制方法上看,在经典PID控制方面,文献[23]设计了线控液压转向系统,实现了基于模糊PID控制的路感反馈,得到了理想路感特性。文献[24]建立了线控转向系统的方向盘力回馈模型;利用PID进行系统优化,并满足路感要求。
在现代控制方法应用上,文献[25]运用多变量模糊控制技术研究线控转向系统的路感,结合ADAMS提供的离线汽车数据,在Matlab/Simulink中对路感多变量模糊控制器进行仿真,并进行了硬件在环试验,得到路感多变量模糊控制的参数调整方法,发现路感仿真数据同硬件在环仿真结果基本一致。文献[26]设计了一种基于BP神经网络整定的自适应PID控制器,实现PID参数在线调整,通过实验证明线控转向系统可实现理想的路感特性。文献[27]提出了线控转向系统路感的分层控制策略。上层控制策略研究不同车速和方向盘转角下方向盘的目标回正力矩;下层控制策略根据分数阶PI~λD~μ,结合已确定的目标回正力矩,对路感模拟电机进行实时控制,实现驾驶员的路感模拟与方向盘的回正。文献[28]基于线性自抗扰控制技术设计了一种车辆线控转向路感模拟控制算法,在给定道路函数条件下进行了系统仿真。试验结果表明,所设计的线性自抗扰控制器可以实现强鲁棒和高精度的车辆线控转向路感模拟控制。
路感研究不仅是线控转向实验台的重点、难点,也是线控转向技术的重点、难点,目前在控制算法及方法上各科研团队采用方案不尽相同,但以电机反馈路感的结构形式已被大多数团队采纳。
2.3 线控转向仿真实验平台
仿真平台设计是线控转向实验台基础,为满足仿真平台实时性要求,一般采用的硬件再环开发工具有:dSPACE产品、Mathwork 公司的xPC Target产品以及NI 公司的PXI、CompactRIO产品等。这些产品都具有运算迅速、I/O接口快速且适应面广、体积小及扩展性好等特点。
杭州电子科技大学[29]基于实验条件与目的选择软件Matlab/Simulink和硬件开发板YXDSPF28335 搭建基于模型的DSP 仿真平台,实现了主机和目标机之间实时数据交互;并借助Simulink/Stateflow 建立转向执行电机测试模型进行目标板DA输出补偿测试以及转向执行电机的前期测试验证DSP 仿真平台准确性;利用Simulink 设置GUI 用户界面在线调参以及动态绘图模块,实现了实时绘制动态曲线图功能。
武汉科技大学[14]基于CarSim和dSPACE实时仿真系统,进行了综合状态反馈控制仿真,利用ControlDesk软件进行数据监控,结果满足实时性的要求。其中基于CarSim进行整车建模,数据全面、准确性高而且可进行实时动画显示,优化了实验驾驶体验;dSPACE实时仿真控制系统,准确性高、实时性好,并且提供数据监控软件。
江苏大学[3]建立了整车2 自由度模型,利用NI公司的LabVIWE软件和CompactRIO 硬件搭建了实验台平台;为方便控制和查看数据,利用LabVIWE在上位机中制定了仿真初始化设置和查看仿真数据的监控程序。
吉林大学[13]基于Mathwork 公司的xPC Target实时环境构建8 自由度整车实时仿真模型,通过xPC target 提供的数据采集模块和xPC 示波器模块获得和实时显示实验数据。相较于dSPACE平台,xPC 虽然在性能上、应用及配置方面稍逊一筹,但在价格上更为低廉。
3 自主开发实验台
本单位自主研发线控转向实验台,结构设计如图2所示,将实现驾驶员路感特性研究、驱动控制策略研究、实时模拟阻力加载及实时在线监控等个性化功能集成,以贴近真实动静态工况,对整车性能进行仿真分析。针对软件平台的设计:基于dSPACE实时仿真平台,借助第三方整车动力学软件CarSim与Matlab/Simulink 建立SBW 控制器模型及仿真环境,利用ControlDesk软件监控实时数据,并通过CarSim实时显示仿真动画;针对硬件平台的设计:通过对比不同阻力模拟系统优缺点,阻力模拟系统选用BLDC 电机模拟阻力,加装减速装置安装在转向节主销位置,直接提供转向阻力矩;转向驱动系统选用本田EPS 转向梯形,通过控制EPS助力电机,驱动转向梯形;路感反馈系统利用德国Sensodrive 公司的永磁同步电机(PMSM)为驾驶人员提供路感反馈,系统中的转角传感器为中控机提供方向盘转角、力矩信号;整车仿真中的车速、发动机扭矩等信号由上位机仿真得到并提供给中控机。
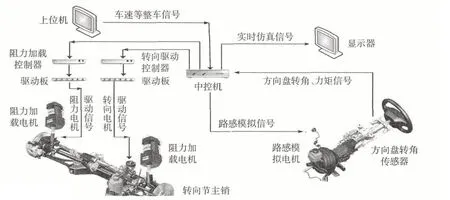
图2 自主设计实验台结构示意图
4 结束语
目前国内各科研单位从线控转向实验台的搭建、优化到研究做了大量工作,在实验台硬、软件平台设计方面都取得了不小的成绩,并且已有不少高校开发出了针对相关科研课题的线控转向实验台,能够满足相关针对性线控转向技术研究要求,但也存在着实验台功能单一、精度不高、集成度较低和针对仿真车型通用化程度较弱等缺点,这也是新一代SBW实验台研究和开发的重点方向之一。
本单位研发的实验台集成了转向实验台阻力模拟系统、线控转向实验台路感模拟系统、线控转向实验台仿真平台;可基于本线控转向实验台进行SBW系统驾驶员路感特性研究、SBW系统控制策略研究、系统中相关电机控制策略及算法验证,并可模拟动画实时显示及不同工况下的阻力。
[1]Tong-Jin Park,Se-Wook Oh.The Design of a Controller for the Steer-by-WireSystem Using the Hardwire-Inthe-Loop-Simulation System[J].SAE,2002-01-1596.
[2]Jeha Ryu,HeeSoo Kim.Virtual Environment for Developing Electronic Power Steering & Steer-by-Wire System[J].IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS′99),IEEE 1999.
[3]穆桂脂.线控转向前轮转角控制策略硬件在环仿真研究[D].镇江:江苏大学,2009.
[4]IABG,Inc.HIL System Test Stands for Active Steering Systems for BMW[EB/OL].[2015-03-12].http∶//www.iabg.de/en/news-events/details/news/hil-systempr/.
[5]dSPACEGmbH.Test Bench for BMWs Active Steering[EB/OL].[2015-03-12].http∶//www.dspace.de.
[6]IPG,Inc.Virtual driving tests at BMW[EB/OL].[2015-03-12].http∶//www.ipg.de/.
[7]R.Schimpf,Prof.Dr.P.E.Pfeffer.Hardware-in-the-Loop Steering System Test Bench Based on Electric Linear Motors[C]//"apply & innovate 2010"- IPGTechnology Conference,2010.
[8]AB Dynamics,Inc.Steering System Test Machine[EB/OL].[2015- 03- 12].http∶//www.abd.uk.com/en/steering_test_machine.
[9]牛继高.汽车电动助力转向系统测试平台的开发与研究[D].重庆:重庆交通大学,2009.
[10]季学武,马小平,陈奎元.EPS系统性能试验研究[J].江苏大学学报:自然科学版,2004(2):116-119.
[11]杨胜兵.线控转向系统控制策略研究[D].武汉∶武汉理工大学,2008.
[12]刘军,穆桂脂,罗石,等.线控转向硬件在环系统设计[J].机械设计与制造,2009(3):93.
[13]刘冰.汽车线控转向系统硬件在环试验台研究与开发[D].长春:吉林大学,2008.
[14]丁洋.基于dSPACE的SBW 硬件在环仿真平台开发[D].武汉:武汉科技大学,2013.
[15]向海鸥.电控转向硬件在环试验台开发与验证[D].长春:吉林大学,2014.
[16]王帅.线控转向阻力模拟系统研究及其试验台设计[D].武汉:武汉理工大学,2013.
[17]于蕾艳,伊剑波,鲍长勇.汽车线控转向系统的路感反馈技术综述[J].山东理工大学学报:自然科学版,2013(4):5-11.
[18]王德志.SBW试验台控制单元设计及分析[D].西安:长安大学,2009.
[19]Bolourchi,Farhad.Feed forward feedback control for steer-by-wire system∶US,EP20010203784[P].2002-05-08.
[20]黄超兵.磁流变阻尼器在线控转向系统力反馈中的应用研究[D].宁波:宁波大学,2012.
[21]宗长富,麦莉,王德平,李雅娟.基于驾驶模拟器的驾驶员所偏好的转向盘力矩特性研究[J].中国机械工程,2007(8):1001-1005.
[22]程荣国.商用车辆EPS系统总体设计及控制策略研究[D].西安:长安大学,2008.
[23]赵苗苗.基于模糊PID的线控液压转向系统路感控制研究与实现[D].南京:南京农业大学,2011.
[24]唐绍丰.基于模糊自适应PID控制的汽车线控转向系统研究[D].淄博:山东理工大学,2011.
[25]王俊,杨胜兵,过学迅,何慧娟.线控转向系统路感模糊控制仿真分析[J].汽车工程师,2011(5):39-42.
[26]罗士军.轮式铰接转向装载机线控转向控制系统研究[D].长春:吉林大学,2008.
[27]田杰,陈宁,吴瑾.基于分数阶PI~λD~μ控制器的线控转向系统路感研究[J].机械设计,2012(10):20-23.
[28]邱绪云,冯晋祥,于明进,阮久宏,谭明旭.车辆线控转向路感模拟控制研究[J].控制工程,2011(1):25-27+141.
[29]金绍勋.基于模型的线控转向半实物仿真实验台研究[D].杭州:杭州电子科技大学,2014.
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
汽车之友(2021年23期)2021-12-24
装备制造技术(2020年11期)2021-01-26
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年9期)2018-08-04
汽车工程师(2018年3期)2018-07-12
电子制作(2017年9期)2017-04-17
湖北文理学院学报(2017年2期)2017-04-16
制冷技术(2016年3期)2016-12-01
工业设计(2016年7期)2016-05-04
