
高速电梯水平振动主动控制研究
2015-12-02 01:43甘若渊亚洲富士长林电梯有限公司江西新余338000
江西建材 2015年14期
■甘若渊 ■亚洲富士长林电梯有限公司,江西 新余 338000
1 引言
伴随着我国社会经济和技术的快速发展,大部分建筑安装了电梯给人们的生活带来很大方便。随着我国经济的不断发展城市中的高楼拔地而起,其中高速电梯成为这些大厦不可或缺的部分。对高速电梯水平振动问题的研究对提高高速电梯的运行安全和乘客的舒适度具有重要意义。本文针对高楼中高速电梯水平振动问题进行了研究,分析了电梯导轨对各导靴的作用力,接着采用主动控制策略对高速电梯进行模糊电气控制,建立了控制模型并进行了仿真分析。
2 电梯导轨对各导靴的作用力分析
高速电梯是非常复杂的多体运动系统,其结构图如图1 所示,电梯桥厢发生水平振动的诱因有很多种,其中电梯的导向系统对电梯的水平振动影响最大。电梯的导向系统由导靴和导轨两部分组成,导靴一般安装在电梯导轨支架的两侧,高速电梯的导靴一般使用滚动式导靴。
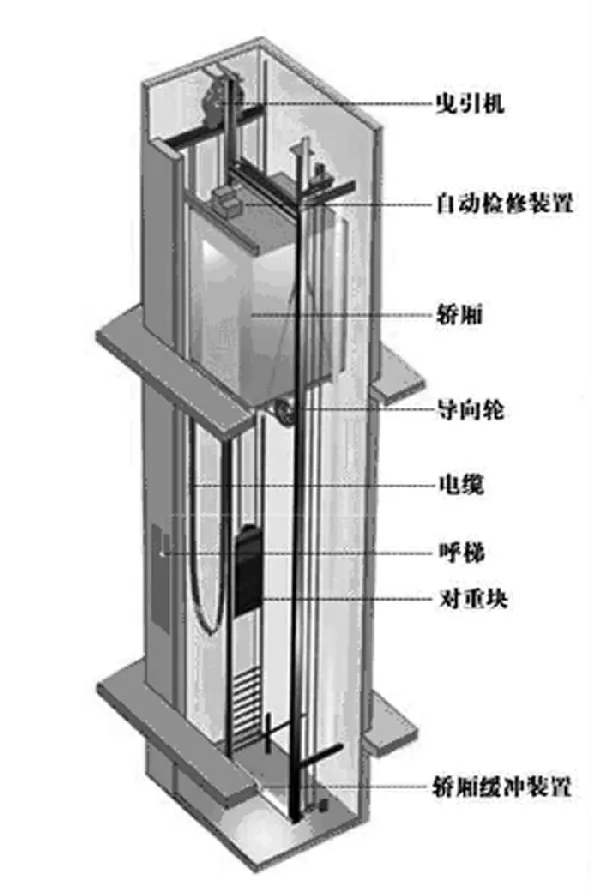
图1 高速电梯结构图
研究表明高速电梯的水平振动幅度和电梯的速度成正比例关系,并且在高速电梯中导轨的激励状态是影响电梯振动的关键因素之一。高速电梯中导轨对电梯桥厢的激励主要受电梯导轨的弯曲程度、施工工艺误差和接头间隔距离等因素影响。在对高速电梯的水平振动问题进行仿真时,一般会在电梯桥厢上加上短脉冲、阶跃、三角等激励,这种仿真方式有较高的仿真效果,但是依然存在很多问题需要改进。本文针对现阶段高速电梯水平振动仿真存在的问题同时兼顾模型的实用性,将电梯系统中的导靴、桥架、导轨的弯曲和不平整度等因素考虑在内,并且将导轨激励引入到电梯水平振动的模型中,这样缩小了各种类型激励对电梯水平振动的影响,建立起比较完善的电梯桥厢水平振动模型。因为高速电梯采用滚动导靴,因此高速电梯的导轨和滚动导靴属于滚动接触并且两者之间会产生Herta 接触力。根据Kaler 博士提出的三维接触滚动理论可知,电梯的导轨和导靴接触点的位移值和该点受到的力的方向有关,从而可以建立导轨和导靴的接触模型,如图2 所示,
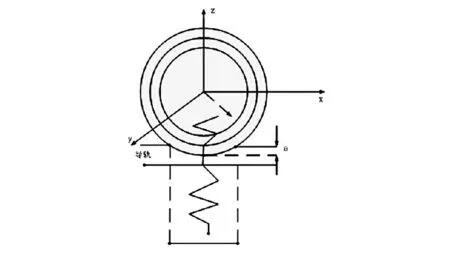
图2 高速电梯导轨和导靴的接触模型
通过上图2 可知,高速电梯的导靴受力方向是沿着z 方向的,并且电梯导轨和导靴之间的接触面上单位长度所受到的力可通过下式(1)计算出来

上式(1)中L 代表圆柱体轴线方向的长度,F 代表圆柱体上受到的总负荷。
3 高速电梯水平振动主动电气控制设计
根据上文中高速电梯导靴和导轨接触的模型,本文设计了基于液压作动器的电梯主动导靴,然后采用模糊控制实现对电梯的主动电气控制达到降低高速电梯水平振动的目的。如下图3 所示为液压主动导靴导轮的结构图,以液压油缸为主动导靴的执行机构,液压油缸安装在导靴支架与导轮的支撑摇臂之间,替代被动导靴中的减振弹簧。以高速开关阀作为控制阀,通过阀的开启和关闭来控制油缸内的油压。系统的控制机理为恒压力控制,当电梯沿着平直的理想导轨运行时,可以通过液压装置保证导轮与导轨的紧密接触,同时使电梯轿厢免受导轨不平度的影响而达到减振的目的。为了吸收及消除压力脉动,提高液压系统的性能,每一液压油缸连接了一个蓄能器。
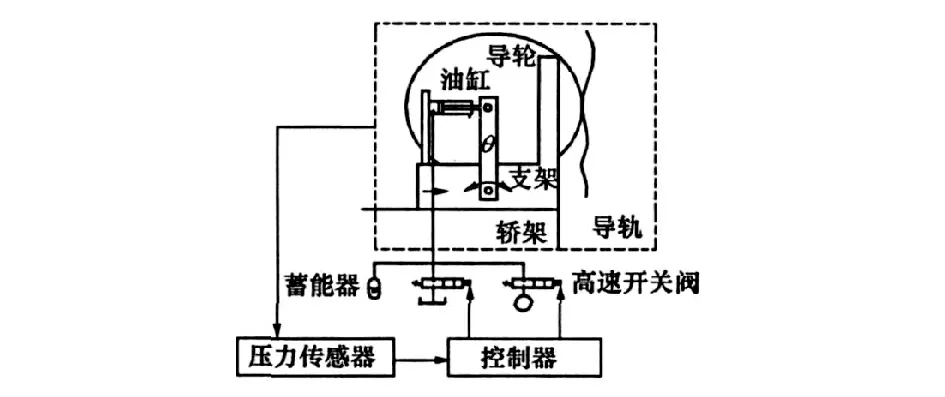
图3 液压主动导靴导轮结构图
本文在采用液压主动导靴减缓高速电梯振动的基础上采用模糊控制算法对液压系统进行电气控制从而进一步减低电梯水平振动程度。因为液压控制系统属于非线性的控制系统,一般的控制方法不能取得较好的效果,而模糊算法可以实现输入和输出变量的模糊化,并且具有良好的鲁棒性能可以实现对液压系统的有效控制。
模糊控制器的设计步骤主要分为以下几步:
(1)选择输入变量、输出变量
输入变量是被控对象的实际输出值与给定值的偏差和偏差的变化率。它们是自然语言,不是数值变量。所以可以将其看着“模糊”的。输入变量为偏差和偏差的变化,输出变量为控制量,构成二维模糊控制器。
(2)确定输入输出变量的论域范围,计算量化因子以及比例因子
确定偏差、偏差的变化以及控制量的基本论域,例如如果控制量的基本论域为[-50,50]、[-150,150]和[-64,64],而它的模糊论域为{-4,-3,-2,-1,0,1,2,3,4},那么它的量化因子和比例因子可知分别为:

(3)语言变量值的正确选取
综合考虑各方面因素,每个语言变量一般选4—10 个值,考虑到各个变量的正、负性,对于偏差、偏差的变化率和控制量的变化这些语言变量,通常采用目前比较通用的语言量,即“NB”“NM”、“NS”、“ZO”、“PS”、“PM”、“PB”来表示。结合各个量的偏差、各个量的偏差的变化率、各个控制量的变化表示成各自的模糊集。
(4)制定模糊控制规则
确定赋值表就定义了模糊子集,也就是确定了模糊子集隶属度函数曲线的形状。通过离散该曲线,获得了不同点的隶属度,这些不同的点所对应的不同的模糊变量就构成了模糊子集。
(5)模糊控制查询表的生成
模糊控制查询表的生成包括五个方面:计算偏差以及偏差变化对应的语言值隶属度、查找被激活的模糊控制规则、计算被激活规则的前件满足度、计算输出模糊集合、解模糊。

图4 液压主动导靴导轮结构图
通过模糊控制器的设计步骤对高速电梯液压导靴的控制进行设计,得到如图4 所示结构图在上图4 中p 代表液压执行器的油压,代表执行器油压的导数,两者作为作为模糊控制器输入量,以高速开关阀的PWM 驱动信号的占空比作为输出量。
4 控制仿真分析
本文采用matlab 软件液压主动导靴及其模糊控制模型进行仿真,在进行仿真时将电梯的速度设定为3.5m/s 并且将电梯桥厢底部中心的水平振动加速度作为观测值。通过仿真对比可以发现,采用被动导靴控制时振动平均加速度为0.277m/s2,方均根值为0.091m/s2,而采用主动导靴控制时振动的平均加速度为0.157m/s2,方均根值为0.052m/s2,与被动控制相比平均加速度降低了43.7%。
通过对比可知采用主动控制策略能够有效降低高速电梯的水平振动。
5 结语
随着我国经济的快速发展高速电梯在高层楼宇中获得了广泛使用,本文首先分析了电梯导轨对各导靴的作用力,然后设计了液压主动导靴并采用模糊控制器进行控制,最后通过仿真对比发现采用液压主动控制能够有效降低电梯的水平振动幅度。
[1]吴广明.电梯系统垂直振动分析与抑制[J].振动与冲击,2013.
[2]李立新.高速曳引式电梯振动主动控制技术研究[J].振动与冲击.2012.
[3]周志翔.超高速电梯发展中存在的问题与研究方向.控制工程,2011,10.
[4]杨小锋.超高速电梯气动特性及其优化的数值模拟研究[硕士学位论文].北京:北京航空航天大学,2011.
[5]傅武军,朱昌明.高速电梯水平振动建模及动态响应分析.机械设计与研究,2013,19(6):65~67.
猜你喜欢
浙江共产党员(2022年10期)2022-11-23
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中国特种设备安全(2019年7期)2019-09-10
中学生数理化·高一版(2019年3期)2019-04-15
新能源科技(2018年10期)2018-02-15
浙江共产党员(2017年11期)2017-11-15
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
