
传感网络中高精度滤波器设计
2015-12-02 20:51王刚
现代电子技术 2015年22期
王刚

摘 要: 传感网络中外部信号干扰与传感信号的同质化日趋严重,设计可区分两者信号的传感网络滤波器成为研究的热点。设计一种高精度有源滤波器系统,该系统包括电源模块、两个DSP控制模块、信号采集与调整模块、驱动模块和显示模块。分析并联型有源滤波器的运行原理,采用CCS2.0设计传感网络中有源滤波器系统软件,详细描述了系统软件开发模型,给出了滤波器中的部分C语言代码。实验结果表明,所设计滤波器在传感网络电压畸变及负载突变情况下,能够较好地完成谐波抑制,具有较强的应用性。
关键词: 传感网络; 高精度滤波器; 有源滤波器; 软件开发模型
中图分类号: TN710?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)22?0065?04
0 引 言
随着计算机技术和网络通信技术的快速发展,使得不同种类设备不断增加,导致电力传感网络中的谐波污染逐渐加深,增加了传感网络线路损耗,降低传感网络数据传递质量。因此应在传感网络中安装高精度的滤波器,吸收传感网络中的谐波,降低传感网络电网中谐波的注入量[1?3]。因为无线传感网络中设备所处的环境较为复杂,电源供电具有一定的局限性,因此如何设计成本低、调谐效率高的滤波器成为研究的热点[4?6]。
当前滤波器设计方法很多,但是都存在较多的问题。文献[7]分析了腔体滤波器,该滤波器对电流波动产生的磁场强度进行调谐,调谐效率较低,并且存在失真效应。文献[8]分析的无源滤波器通过电容器、电抗器和电阻器不同的组合形式实现不同的补偿功能,但是该滤波器滤波特性依赖于系统参数,无法实现谐波的动态补偿。文献[9]提出一种晶体滤波器,该滤波器具有较高的滤波选择性能,但是价格偏高,应用率低。文献[10]提出一种介质滤波器,该滤波器能够完成窄带滤波,但是存在高次寄生通带,并且具有较高的局限性。
1 传感网络中的滤波器系统的整体设计思路
传感网络中的滤波器系统需要对传感网络的电压和电流信号进行收集和操作,并且运算相关的指令电流,输出对应的开关控制方案。本文设计的传感网络滤波系统结构图如图1所示。分析图1可以看出,传感网络滤波系统包括电源模块、两个DSP控制模块、信号采集与调整模块、驱动模块和显示模块。
本文针对传感网络设计的有源滤波器系统分析过程复杂,需要利用TMS32OF2812(简称2812)和TMS32OVC33(简称VC33)两块DSP控制模块对传感网络中的大规模数据进行分析和处理。两个DSP同时运行,并将2812当成首要控制器,用于收集传感网络数据、形成脉冲宽度调制信号、并实现故障的保护。将VC33当成辅助处理器,用于运算实时数据,采集畸变电流中的谐波以及无功分量,运算脉冲宽度调制指令。2812以及VC33使用双口RAM完成数据通信,利用总线获取控制板中的资源,并通过调理和采集模块,实现传感器信号的采集和处理。电源模块则负责总体传感网络中有源滤波器系统的能量供应。2812可产生脉冲宽度调制开关控制信号,经光耦隔离后传递到驱动模块中,实现逆变桥的有效调控。在试验过程中可以通过按键显示操作并观察传感网络中谐波的滤波结果。
2 传感网络中并联型有源滤波模块设计
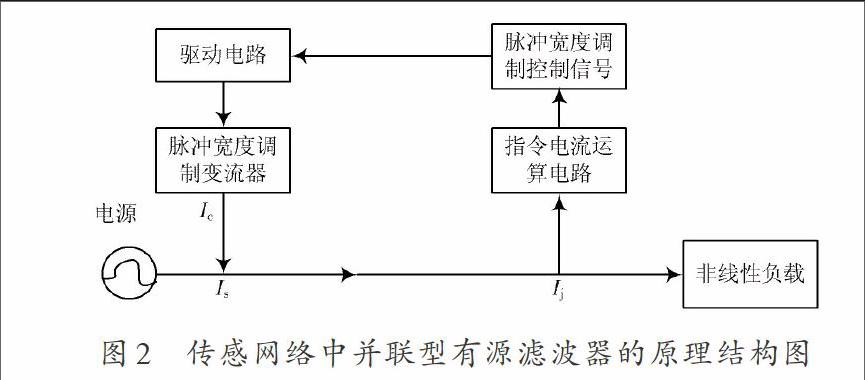
传感网络中的有源滤波器可分为并联型和串联型两种类型,本文采用并联型有源滤波器,其运行原理用图2描述。
分析图2可以看出,传感网络中的并联型有源滤波器包括指令电流运算电路和补偿电流发生电路两个模块,其中补偿电流发生电路包括电流跟踪控制电路、驱动电路以及主电路。指令电流运算电路可对被补偿对象中的谐波和无功电流分量进行检测。补偿电流发生电路依据指令电流形成的补偿电流指令信号,对逆变主电路进行调控,确保其形成补偿电流,再将该补偿电流输入到传感网络中,进而过滤传感网络中的谐波以及无功电流,确保传感网络的稳定。
图2所示的并联型传感网络滤波器的工作原理是:通过传感网络中的电压和电流传感器,对待补偿对象的电压以及电流进行检测,再通过指令电流运算电路获取补偿电流的指令信号,利用脉冲宽度调制控制信号单元将指令信号变换成脉冲宽度调制指令,最终确保逆变器输出与负载中形成的谐波具有同等大小和相反方向的补偿电流。
3 传感网络中的高精度有源滤波器软件设计
3.1 软件开发系统模型
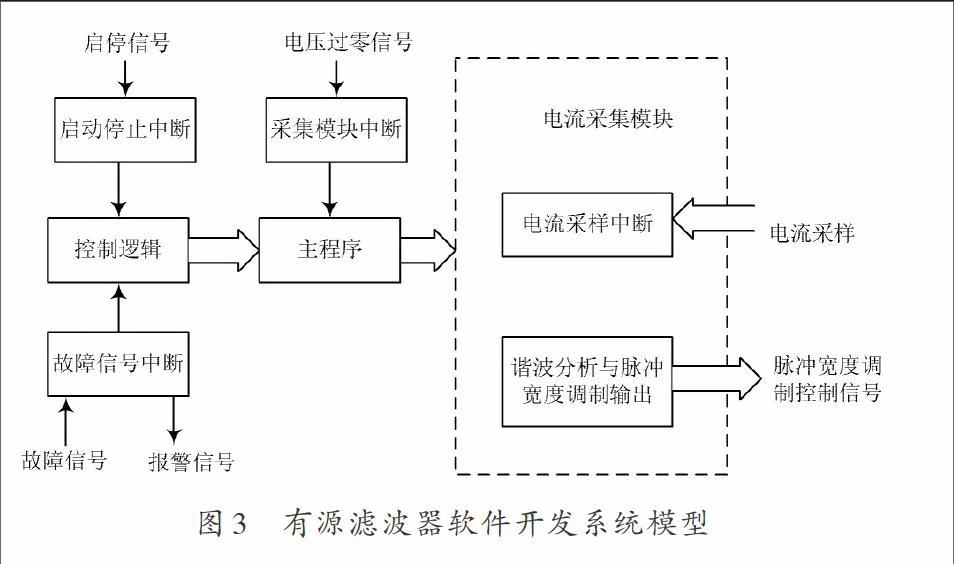
本文采用CCS2.0(CodeComposerStudio)设计传感网络中有源滤波器系统的软件。CCS集成了代码产生和测试部件,提高了系统程序设计的效率。传感网络中有源滤波器软件开发系统包括主程序和中断服务子程序。而中断处理程序是传感网络中有源滤波器软件系统的关键部分,其由电流采样中断、故障信号中断、采集单元中断以及启动信号中断构成,如图3所示。电流采样模块可对有源滤波器系统中两种DSP控制板的控制信号进行响应,对从传感网络中获取的电流进行分析,运算电流谐波,基于指令电流信号,产生调控变流器通断的开关信号。
采集模块主要是对电压超零的中断信号进行响应,获取传感网络信号的基波频率,对定时器值进行及时更新,并实时监督传感网络信号频率的波动情况。采集模块还可确保滤波器的运行频率同传感网络电压保持一致。当逆变器中超过设置的电压、电流形成输入信号时,故障信号中断单元则即刻关断变流器,确保总体有源滤波器系统的安全,并发出报警信号。启动和停止信号中断主要实现系统的运行和停止。
图3 有源滤波器软件开发系统模型
3.2 代码设计
本文设计的滤波器系数由 Matlab 仿真得到。本文滤波器中的部分C语言代码如下:
#include "DSP28_Parts.h"
#include
#include
#include
… … … … … … … …
… … … … … … … …
interrupt void GMINRE_DHG(void) //ADC
{
… … … … … … … …
… … … … … … … …
d_fgQmX1=vol; //PI 调节vol为偏差电压
vol=24700 ? Dmmcon[4] ;
ip=(872137*vol ? 87552*d_fgQmX1)>>16
/compute the ip',iq' ********************************/
… … … … … … … …
… … … … … … … …
d_fgQmX[2]=d_fgQmX[1]; //Q13
d_fgQmX[1]=d_fgQmX[0];
d_fgQmX[0]=((2*d_faIpX[0]+4*d_faIpX[1]+2*d_faIpX[2])+24472*d_fgQmX[1]?13556*d_fgQmX[2])>>14;
d_faIqY[2]=d_faIqY[1]; //Q13
d_faIqY[1]=d_faIqY[0];
d_faIqY[0]=((2*d_faIqX[0]+4*d_faIqX[1]+2*d_faIqX[2])+24472*d_faIqY[1]?13556*d_ fgQmX[2])>>13;
… … … … … … … … … … … …
… … … … … … … … … … … …
}
4 实验分析
为了验证本文方法的有效性,需要进行仿真实验分析。实验参数:传感网络电压为AC 36 V/40 Hz(线电压)由三相调压器降压获取,直流侧电压为140 V,仿真实验中传感网络的三相电源中都有15%的6次谐波和7%的8次谐波,构成非理想电压源。负载在0.4 s情况下,三相桥负载电阻从10 Ω调整到6 Ω,传感网络负载发生突变。逆变器输出电感1 mH,谐波源为直流侧带电阻负载的三相全控整流桥。实验只进行了低电压小电流的补偿实验,只补偿了电源A相电流中的谐波和负序分量。
实验分析了采用本文滤波器前后传感网络电压畸变和负载突变情况下的传感网络A相电流波形,进而验证本文滤波器对传感网络滤波器负载的谐波无功电流进行补偿的效果优劣。未采用滤波器前,传感网络电流的波形和频谱分析结果如图4所示,实验只分析了A相电流波形。
投入本文设计的滤波器后,传感网络电流波形用图5描述。分析图5可得,传感网络负载突变后,通过1个工频周期的调控,传感网络恢复平稳。采用本文滤波器补偿前的传感网络电流中存在较多的2,4,6,8,10,12,14次谐波,电流总畸变率为14.88%。而采用本文滤波器补偿后的传感网络电流波形对称并同正弦波一致,同时可观察到传感网络电流中的2,4,6,8,10,12,14次谐波显著降低,传感网络电流总畸变率为4.23%,说明本文设计的滤波器有效抑制了传感网络中的谐波。也就是在传感网络电压存在畸变并且网络负载突变情况下,传感网络滤波器仍可对负载的谐波无功电流进行高效补偿。
分析上述实验结果可得,本文设计的滤波器在传感网络电压畸变及负载突变情况下,能够较好地完成谐波抑制,具有较强的应用性。
5 结 语
本文面向传感网络,面向传感网络,设计了一种高精度有源滤波器系统。该系统包括电源模块、两个DSP控制模块、信号采集与调整模块、驱动模块和显示模块。分析了并联型有源滤波器的运行原理,采用CCS2.0设计传感网络中有源滤波器系统软件,详细描述了系统软件开发模型,给出了滤波器中的部分C语言代码。实验结果说明,所设计滤波器在传感网络电压畸变及负载突变情况下,能够较好地完成谐波抑制,具有较强的应用性。
参考文献
[1] 方力恒.浅谈电源谐波产生的危害与治理[J].技术交流,2013,10(4):82?83.
[2] 周霞,屈百达.不确定离散网络控制系统的H∞鲁棒控制[J].科学技术与工程,2013,13(25):7401?7407.
[3] 田中大,高宪文,李琨.网络控制系统的自适应预测控制[J].应用科学学报,2013,31(3):303?308.
[4] 王欣,康宇,尚伟科.一类基于双通道网络的离散Markov跳跃系统的鲁棒H∞控制[J].中国科学技术大学学报,2013,43(4): 278?286.
[5] FATHI V, MONTAZER G A. An improvement in RBF learning algorithm based on PSO for real time applications [J]. Neurocomputing, 2013, 111: 169?176.
[6] ZAYANDEHROODI H, MOHAMED A, FARHOODNEA M, et al. New training strategies for RBF neural networks to determine fault location in a distribution network with DG units [C]// Proceedings of 2013 IEEE the 7th International Power Engineering and Optimization Conference. Langkawi: IEEE, 2013: 450?454.
[7] CHAOWANAWATEE K, HEEDNACRAM A. Improved cuckoo search in RBF neural network with Gaussian distribution [C]// Proceedings of 2013 IEEE the 8th International Conference on Advances in Computer Science. Phuket: IEEE, 2013: 379?386.
[8] LIU Z, ZHANG H. Optimal design of RBF NN based on QPSO algorithm [J]. Journal of Central South University (Science and Technology), 2013, 44(1): 27?30.
[9] CHAI W, QIAO J. Non?linear system identification and fault detection method using RBF neural networks with set membership estimation [J]. International Journal of Modelling, Identification and Control, 2013, 20(2): 114?120.
[10] LUO S H. Adaptive RBF network control for uncertain system of dual arm robot [C]// Proceedings of 2013 IEEE the 2nd International Conference on Mechanical Engineering, Materials and Energy. Dalian, China: IEEE, 2013: 37?40.
