
一种飞机无线电高度表原位检测仪的设计
2015-12-02 20:59赵波魏俊淦田建学
现代电子技术 2015年22期
关键词:高度表
赵波+魏俊淦++田建学
摘 要: 基于飞机外场原位检查无线电高度表的目的,采用PC104工控机和STM32嵌入式处理器为系统核心研制了高度表原位检测仪,包括功能框图、各模块的设计思路,软件功能划分和体系结构,实现高度表信号隔离和电平转换,产生高度模拟信号、指示器模拟信号、提供高度表检查信号,对正常、告警跳闸信号进行指示,对线性高度电压、非线性高度电压进行测量,该设计实现了简便友好的人机交互,已经在航空检测中使用验证。
关键词: 高度表; 原位检测; 高度模拟; 单元电路
中图分类号: TN98?34 文献标识码: A 文章编号: 1004?373X(2015)22?0075?03
无线电高度表实时测量飞机至地(海)面的真实高度,测量的高度数值在指示器上进行指示,同时高度电压输出到自动驾驶仪和导航计算机进行飞行控制,输出到飞行参数记录仪记录高度表工作状态。高度表性能对飞行安全有着重要的影响[1],按照飞机维护工艺卡片要求,需要定期对高度表输出的高度数值和高度电压以及代表高度表工作状态的跳闸电压,高度表良好电压等进行检查和测量,为此研制了某型无线电高度表原位检测仪(以下简称原位检测仪),使其可以在外场对高度表在安装位置上直接进行性能测试。
1 硬件设计方案
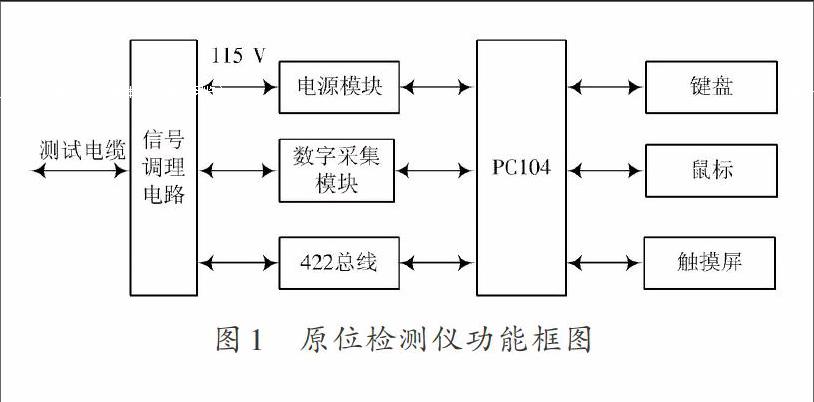
原位检测仪功能框图见图1。原位检测仪包括电源模块、PC104、信号调理电路、数据采集模块等。它通过测试电缆和高度表检测插座相连,负责产生高度模拟信号、指示器模拟信号、提供高度表检查信号,对正常、告警、高度正常、闭锁、危险高度、跳闸信号显示,对线性高度电压、非线性高度电压进行测量和显示,可单独完成外场的检测任务[2]。
1.1 系统控制板和触摸屏
系统控制板拟采用研祥生产的104?1816CL2NA,是一款基于Intel?新一代凌动Bay Trail SoC 平台的104 主板,CPU 选用Future Intel? Celeron? Processor for Intelligent Systems(based on 22 nm Intel? Silvermont MicroarChitecture),主频为4 核2.0 GHz,图形核心整合Intel第七代图形引擎、两条显示管线,支持DX11及3D 输出。配备触摸显示屏,亮度要求达到1 000 nit,确保在强光下也能看到显示内容[3]。采用Windows操作系统作为系统软件支持平台来进行资源的统筹管理,采用CVI8.0进行编程,对检测信号的处理和控制;使用研华的PC104数字采集模块和信号调理板进行通信,其功能上可实现多点自动测试、单点自动测试、手动测试,对测试结果可实现显示、存储。因而具有技术先进、功能较强、自动化程度高的特点。
1.2 信号调理板
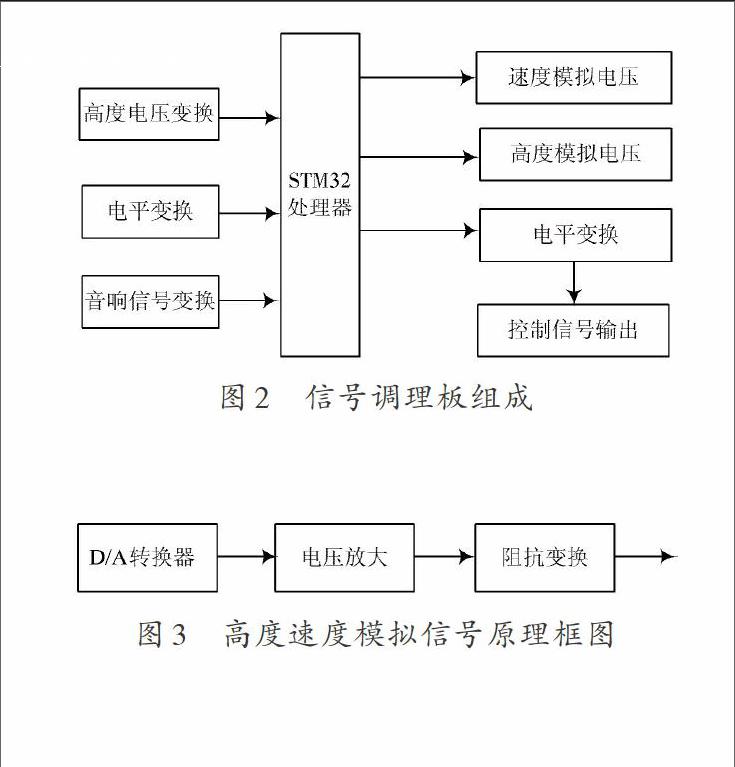
信号调理板见图2,信号调理板用于安全连接高度表电路,并对模拟量的幅度进行变换,使其幅度满足A/D采集卡对信号幅度的要求。对控制信号进行信号隔离和电平转换,高度表设备控制信号和状态信号为27 V,而STM32处理器无法忍受27 V的电压,需要对电平转换。对需要检测模拟信号进行变换,这里包括幅度和极性,使其幅度在A/D采集电压范围之内,对交流信号检测,采取把交流电压线性变换为直流电压方法来实现。在本检测设备中需要检测的模拟量有:DC 27 V电源、AC 115 V电源和AC 36 V电源,线性和非线性电压,音频电压,还有高度及速度模拟输出电压。其中DC 27 V、线性非线性电压为直流电压;音频电压、AC 115 V和AC 36 V电源为交流电压[4]。
高度、速度模拟信号是通过D/A转换器产生符合要求的电压信号,原理见图3,高度模拟时,为一个固定的电压;速度模拟时为一个随时间变化的三角波。然后加到电压放大器使其输出符合测试要求的电压(6.2~8.5 V)。最后加到射随器,进行阻抗变换。当需要高度速度模拟时,把控制信号和模拟信号一起加到高度表[5]。
1.3 电源电路
电源电路用于提供PC104、STM32和信号调理部分需要的+12 V/1 A,-12 V/1 A,+15 V/1 A,-15 V/1 A,
+36 V/1 A,-36 V/1 A,+5 V/4 A电源。
1.4 测试电缆
高度表测试电缆用于连接原位检测仪和高度表检测插座。
2 软件总体方案
2.1 研制思路
以现代故障检测理论为指导,以外部输入激励进行功能、性能检测的黑盒测试方法为基础,以故障树分析算法为核心,对高度表设备进行软硬件快速检测和故障定位。软件结构上采用模块化、开放式结构,软件可以灵活配置。尽量釆用标准模块,根据不同接口、不同测试要求进行构建。
2.2 检测设备功能模块划分
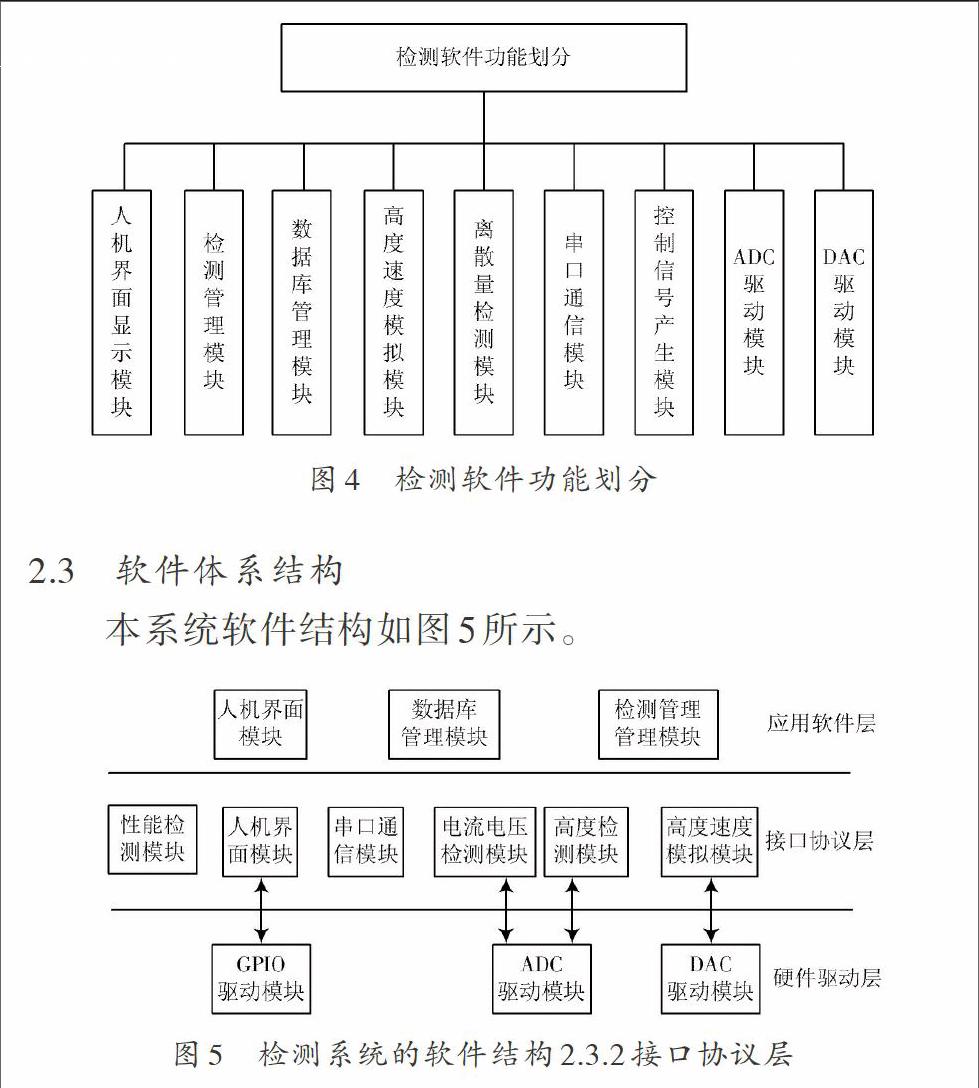
如图4所示,测试软件由人机界面显示模块、数据库管理模块、高度速度模拟模块、离散量检测模块、串口通信模块等,PC104还负责完成系统的初始化、自检、用户管理、检测流程控制、检测结果分析入库等。
2.3 软件体系结构
本系统软件结构如图5所示。
从结构上可将系统软件分为硬件驱动层、接口协议层和应用软件层三个层次[6]。
其中硬件驱动层用于提供应用层与硬件的通信接口,为了保护操作系统安全,系统不允许应用程序直接访问硬件,因此必须通过驱动层使应用程序来访问硬件;接口协议层包含所有测试协议及测试信息数据分流与控制模块,测试程序的所有数据信息都在这层流动;应用软件层包含用户界面和系统功能模块,与用户进行友好交互,实现测试流程以及进行测试结果处理。
系统软件由一系列功能模块组成,包括系统自检模块、串行通信模块、数据控制模块、设备驱动模块、数据显示模块和数据库管理模块等。系统软件模块与模块之间采用消息方式进行数据通信。
2.3.1 硬件驱动层
其作用是使应用层程序可以访问硬件,包括ADC转换驱动、DAC转换驱动等。提供各对外接口的协议包,接口协议等的打包和解析功能。例如对对高度表的控制及状态监控,对电压及电流的监控等,其作用是简化应用层软件对设备的访问。
2.3.2 应用软件层
应用软件层包括检测管理模块及人机交互模块。应用软件层直接体现了检测的过程和思路,是整个软件系统的重点和难点。
其完成部分检测任务,检测管理任务除了调度检测流程外,还要完成数据库的管理、检测报表生成等任务。
2.3.3 检测管理模块
检测管理主模块完成检测的大部分管理工作,包括以下几个方面:接收人机交互模块发来的检测命令并实施检测流程;记录检测人、检测时间、判断授权情况,管理授权;高度速度模拟模块的测量任务;生成检测报告,生成报表。
2.3.4 数据库管理模块
该模块和检测管理模块交互,可用于将历史检查结果存入数据库,方便维护人员掌握各个装备的历史状态;其次,可响应检测管理模块的请求从数据库中查找特定数据,完成数据的检索及统计功能,辅助维护人员判断故障件。
3 关键技术
3.1 实时显示高度表需要检测的数据
本检测设备把需要检测的电源电压、电流、线性、非线性高度电压、模拟高度速度电压、音频信号的电压、频率及持续的时间、故障模拟电压等都实时的显示在触摸屏上。为了保证检测的准确性,检测设备每次开机时,都进行一次自校,同时系统提供校验接口,在校验菜单下进行校验。
3.2 检测设备提供自检
检测设备对高度表输入的每一路模拟信号和状态信号都能提供校验信号,对输出的控制信号和模拟信号都进行闭环检测,这样能最大限度的判断是检测设备问题还是机载设备问题。
4 结 语
该检测仪以工控机和ARM 微处理器为核心,具有体积小、重量轻等优点,非常适合外场对高度表的快速检测。 实际应用表明,该系统方便易携带,完全可以满足外场检测精度和检测速度的要求,同时还具有良好的经济效益。
参考文献
[1] 邸亚洲,周玉平,袁涛,等.无线电高度表综合检查仪的设计[J].测控技术,2014,33(6):5?7.
[2] 程国晓,高宪军,霍长庚.某型无线电高度表原位检测仪的设计与应用[J].仪器仪表装置,2011(10):16?18.
[3] 陈勇,刘晓平,应怀樵.基于 PC104的高性能便携式数据采集系统[J].测控技术,2008,21(1):24?27.
[4] 冯玲.基于 C8051F005 无线电高度表检测仪的研制[D].南京:南京航空航天大学,2008.
[5] 谭忠吉,董正旭,石宇.某型高度表综合检查仪设计与实现[J].计算机测量与控制,2008,17(4):715?717.
[6] 汪凤兰.软件体系结构初探[J].计算机时代,2011(10):1?2.
猜你喜欢
新型工业化(2022年4期)2022-06-16
科学与信息化(2021年20期)2021-08-05
工程与试验(2021年2期)2021-07-14
设备管理与维修(2021年23期)2021-02-10
价值工程(2018年17期)2018-07-27
现代工业经济和信息化(2018年8期)2018-07-19
学生导报·初中版(2017年19期)2017-08-13
教练机(2017年2期)2017-08-12
北京航空航天大学学报(2017年12期)2017-04-23
舰船电子对抗(2016年3期)2016-12-13
