
基于物联网的汽车智能测距系统的设计与实现
2015-12-02 21:11王建宇
现代电子技术 2015年22期
王建宇

摘 要: 基于物联网进行汽车智能测距,可以实现汽车车距的准确控制,对汽车安全设计和智能防撞控制具有重要意义。传统的汽车测距系统设计方法采用多处理器接口测距方法,随着物联网中汽车节点数据增加而测距效果不好。提出基于传感节点数据融合和分布式程序控制的汽车智能测距系统设计方法。首先构建汽车智能测距系统设计的总体模型,给出基于宽带自模糊度特征提取的车辆测距算法。基于物联网的汽车智能测距系统包括了超声波雷达信号的声学基阵、测距雷达信号收发转换和功率放大器以及模拟信号预处理机这三大部分。系统具有测距数据的测量、智能测距的回波模拟、多车道数据记录分析、上位机通信、多通道可编程信号处理等功能。采用TI5000 系列DSP进行测距核心编程,实现系统硬件模块设计和软件编程设计。实验结果表明,采用该系统,具有较好的测距精度,稳定性和可靠性较好。
关键词: 物联网; 汽车测距; 防撞系统; 系统设计
中图分类号: TN713?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2015)22?0094?05
0 引 言
物联网是新一代信息技术的重要组成部分,物联网就是物物相连的互联网,物联网是通过射频识别(RFID)(RFID+互联网)、红外感应器进行全球定位的智能网络。物联网的信息传递设备有传感器、扫描器和RFID识别器,通过物联网把物品与互联网连接起来,实现对信息交互和智能化识别、定位、跟踪。基于物联网进行汽车智能测距和控制,可以保障汽车行驶安全,对汽车智能防撞设计和汽车安全系统设计具有重要意义[1?3]。
基于物联网的汽车智能测距原理是通过无线电信号的读取和写入数据到汽车的防碰撞安全系统中,对测距系统的存储信息进行信息融合分析,通过测距算法实现车辆距离参数的智能估计。通过电感耦合或反相散射耦合方式实现距离的测量,保障系统安全。而传统的汽车测距系统设计方法采用多处理器接口测距方法,随着物联网中汽车节点数据增加,测距效果不好。对此,国内外对测距算法进行改进,提出大量汽车智能测距的原理和方法,如硅光主频法、阻抗法等,人工神经网络、低压原理等智能方法[4?7]。
其中,传统的低压测距误差放大器是将输出反馈采样车辆间距特征与基准参考雷达测距进行研究,放大差值来控制调整车辆的距离状态和导通状态、从而达到稳定输出准确距离的目的。低压测距测量技术法由于受到故障电阻等因素的影响,其测距误差较大,存在硬件造价较高问题,低压测距理论和方法具备不确定性,测距精准度受系统运行方式和压力影响,在车流量较大的交通拥堵状态时,汽车测距的准确性结果不甚理想[8?10]。
物联网环境下,传统的测距系统需要硅光主频信息传递,通过三维雷达控制技术对信息传输实时性要求较高,这在汽车智能测距的发展中带来了不少困难。
针对上述问题,在物联网平台中,本文提出基于传感节点数据融合和分布式程序控制的汽车智能测距系统设计方法。首先构建汽车智能测距系统设计的总体模型,在此基础上,给出基于宽带自模糊度特征提取的车辆雷达信号测距算法,以此为基础进行系统的硬件和软件设计,实现基于物联网的汽车智能测距系统改进设计,仿真实验表明,采用该系统能有效提高汽车智能测距的精度,系统可靠性好,便于应用实现。
1 系统总体设计方案及测距算法描述
1.1 测距原理和汽车智能测距系统总体设计方案
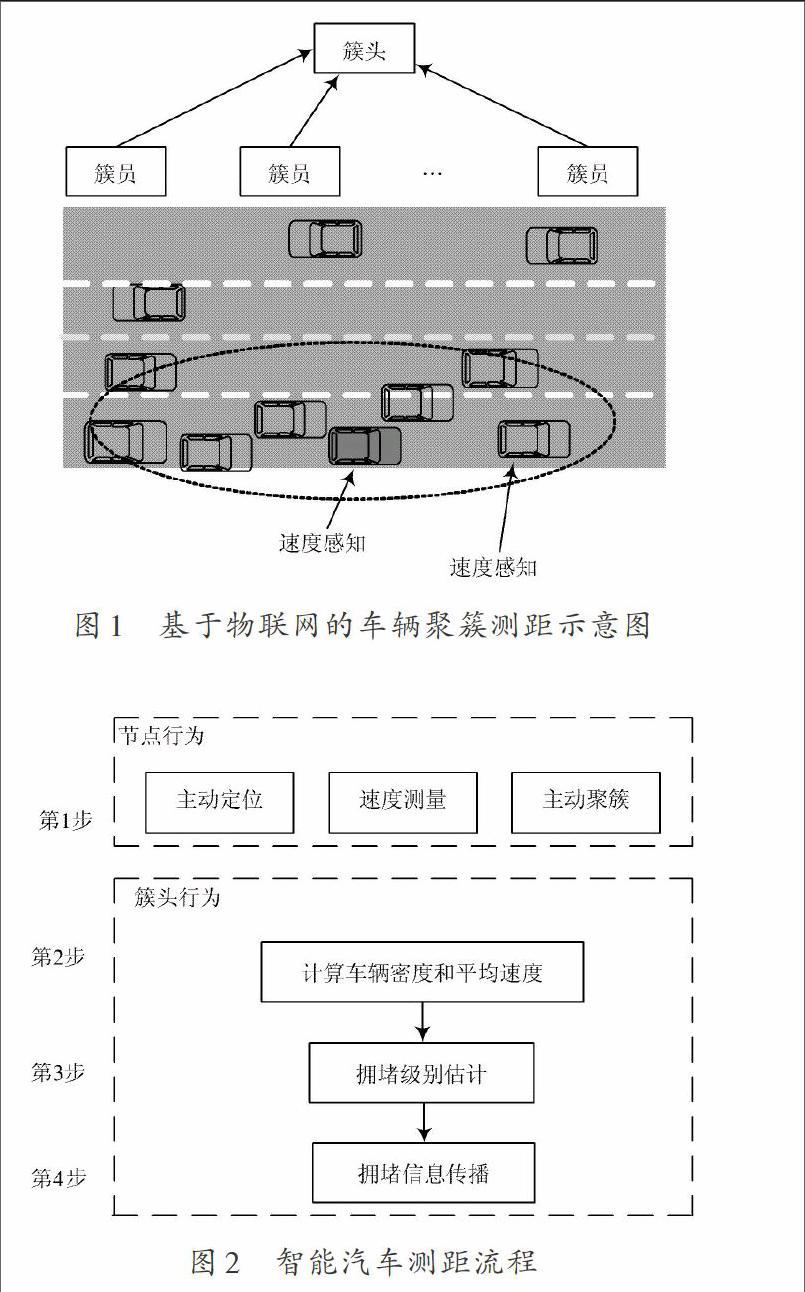
首先分析基于物联网的汽车智能测距系统总体设计方案,测距的基本思想是采用物联网信息感知,通过分散的车辆节点报告车辆的簇头未知,充分利用了车辆的簇头周期性信息,采用协作检测方法(Cooperative Traffic Congestion Detection,CoTEC),在限速不同的车道上,对车辆进行雷达测距,通过雷达准确测距,控制车辆在车道的前后距离,基于物联网的车辆聚簇测距示意图如图1所示。
根据图1所示,基于物联网的汽车智能测距系统自动获取自己的位置信息和速度信息,在聚簇前的初始阶段,车辆聚簇请求信息得到簇头的反馈,把自己的ID设定为簇ID,由于车辆D的速度相对静止,车辆B?F成为簇员,聚簇后,车辆发出雷达信息,开始负责对簇员进行管理,邻居簇头收到后就反馈给同一条道路上不同道路上的处理。邻居簇头发出宽带的二次谐波信号[ut]是由两个调频谐波信号[u1t,u2t]构成,进行空间加权取平均,首先车辆定位测距,智能汽车测距流程见图2。
根据上述原理,构建基于物联网的汽车智能测距系统总体设计方案,基于物联网的汽车智能测距系统的功能模块主要功能包括:
(1) 汽车智能测距数据的测量;
(2) 汽车智能测距的回波模拟;
(3) 多车道数据记录分析;
(4) 上位机通信;
(5) 多通道可编程信号处理等。
基于上述分析,得到本文设计的基于物联网的汽车智能测距系统包括了超声波雷达信号的声学基阵、测距雷达信号收发转换和功率放大器以及模拟信号预处理机这三大部分组成,系统的总体设计组成框图见图3。
1.2 测距算法
为了实现汽车智能测距系统设计,测距算法的设计是关键和核心,本文采用宽带自模糊度雷达测距算法,算法描述如下:
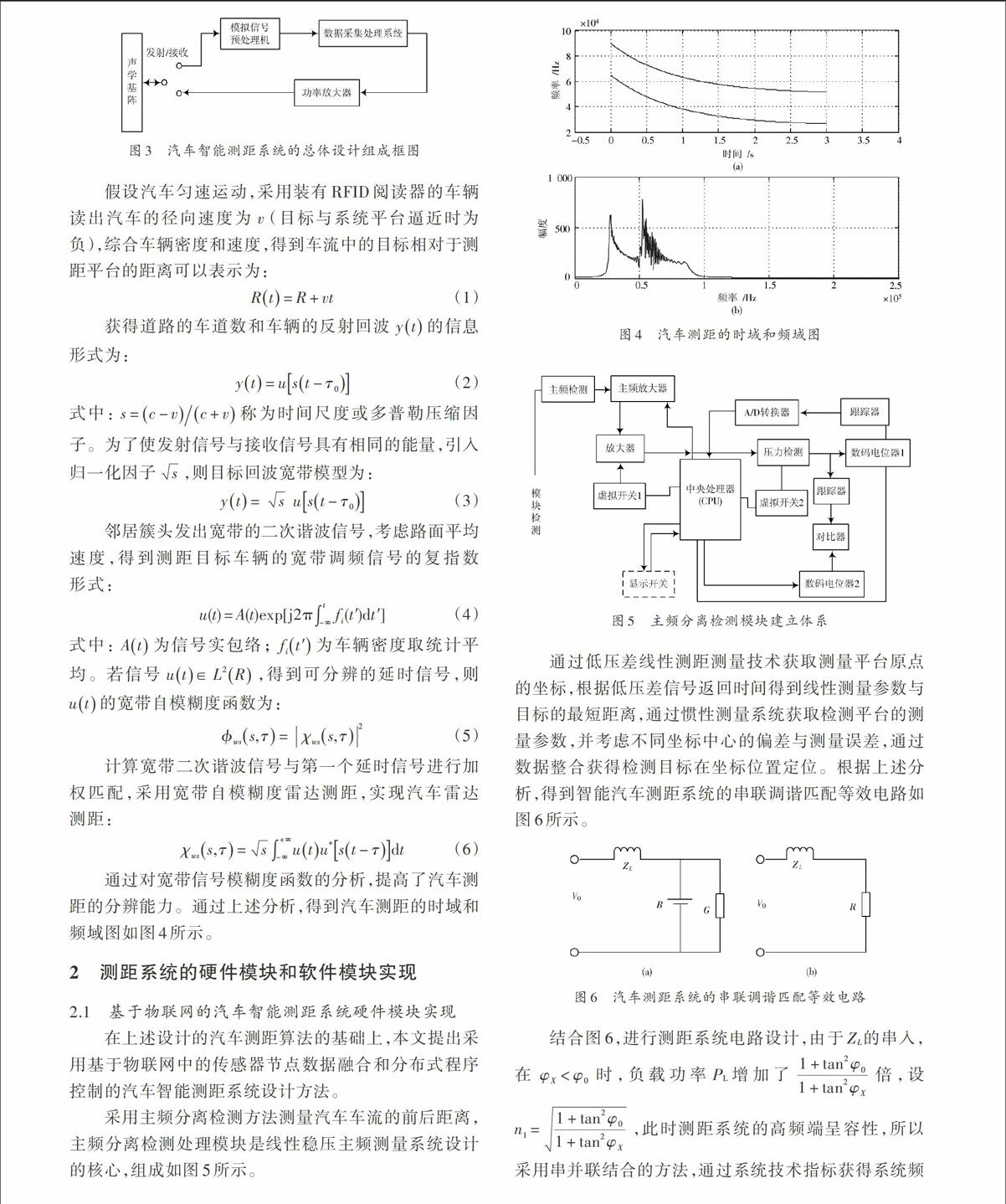
假设汽车匀速运动,采用装有RFID阅读器的车辆读出汽车的径向速度为[v](目标与系统平台逼近时为负),综合车辆密度和速度,得到车流中的目标相对于测距平台的距离可以表示为:
4 结 语
基于物联网的汽车智能测距通过无线电信号的读取和写入数据到汽车的防碰撞安全系统中,对测距系统的存储信息进行信息融合分析,实现车辆距离参数的智能估计。汽车智能测距在汽车防碰撞设计中具有重要意义。本文提出基于物联网中的传感器节点数据融合和分布式程序控制的汽车智能测距系统设计方法。首先构建汽车智能测距系统设计的总体模型,在此基础上,给出基于宽带自模糊度特征提取的车辆雷达信号测距算法,以此为基础进行系统的硬件和软件设计,实现基于物联网的汽车智能测距系统改进设计。研究结果表明,采用本文设计方法能有效实现汽车的智能测距,距离估计精度较高,在不同车道环境和车辆密度下依然保持较好的测距准确性,展示了较好的实用价值。
参考文献
[1] 于海斌,曾鹏,王忠锋.雷达测距技术研究[J].科技通报,2011,25(10):102?110.
[2] 王瑞,马艳.基于分数阶傅里叶变换的线性调频脉冲信号波达方向估计[J].兵工学报,2014,35(3):421?427.
[3] 石鑫,周勇.基于信号峰脊陡变调制的雷达测距算法[J].物联网技术,2015,5(4):12?14.
[4] 程艳合,杨文革.压缩域直扩测控通信信号伪码跟踪方法研究[J].电子与信息学报,2015,37(8):2028?2032.
[5] 吴志军,李光,岳猛.基于信号互相关的低速率拒绝服务攻击检测方法[J].电子学报,2014,42(9):1760?1766.
[6] 梁华东,韩江洪.采用双谱多类小波包特征的雷达信号聚类分选[J].光子学报,2014,43(3):3?7.
[7] LUO Long, YU Hongfang, LUO Shouxi. Congestion avoidance and fast traffic migration based on multi?topology routing [J]. Journal of Computer Applications, 2015, 35(7): 1809?1814.
[8] SUN Chao, YANG Chunxi, FAN Sha, et al. Energy efficient distributed clustering consensus filtering algorithm for wireless sensor networks [J]. Information and Control, 2015, 44(3): 379?384.
[9] TU Chaoping, XIAO Jinsheng, DU Kanghua, et al. Multi?focus image fusion algorithm based on the anisotropic thermal diffusion equation [J]. Chinese Journal of Electronics, 2015, 43(6): 1192?1199.
[10] WANG Qun, DONG Wenlue, YANG Li. A wind power/photovoltaic typical scenario set generation algorithm based on Wasserstein distance metric and revised K?medoids cluster [J]. Proceedings of the CSEE, 2015, 35(11): 2654?2661.
猜你喜欢
数字技术与应用(2016年9期)2016-11-09
电脑知识与技术(2016年21期)2016-10-18
科技视界(2016年22期)2016-10-18
中国新通信(2016年16期)2016-10-18
科学与财富(2016年28期)2016-10-14
环球时报(2016-08-01)2016-08-01
企业导报(2016年6期)2016-04-21
