
神经网络在自适应船舶操作系统中的应用
2015-12-04 07:07师庆林
舰船科学技术 2015年5期
师庆林
(吉林广播电视大学 白城分校,吉林 白城137000)
0 引 言
随着经济发展,海洋运输的地位越来越重要,大型、高速、智能船舶是船舶运输的发展趋势。海运是一种经济实惠的运输方式,因此现在海上船舶的密度越来越大,提高对船舶的操控能力对减少海洋运输的事故性具有现实意义。
神经网络具有自学习、自适应的特点,被广泛用于船舶操作系统中,并且取得了很多研究成果。Brown 等[1]在不直接使用船舶数学模型的情况下,利用模仿人工操作方式探索与普通自动舵操作的差异,并且为修正自动舵的问题建立了规范库。Polkinghorne和Velagic[2-3]基于船舶自适应模糊控制自适应的调整模糊系统的参数,并且在复杂航道中控制船舶航行操作取得了较好的实验效果。
本文首先在RBF-Elman神经网络结构基础上,设计带输出反馈RBF-Elman 递归神经网络,通过实验验证该算法具有收敛速度快,自适应能力强,自学习能力及固有的非线性等特点。最后利用带输出反馈RBF-Elman 递归神经网络作为分类器进行船舶运动状态的辨别,实验结果表明此算法高效、可行。
1 带输出反馈RBF-Elman 递归神经网络
对于非线性函数而言,递推RBF神经网络能够很好地逼近,并且对于一阶系统实验证明已经取得了很好的效果[4],但当系统是高阶的时候效果不明显。在此基础上,将Elman 网络和RBF神经网络相结合形成RBF-Elman神经网络结构,并且设置反馈参数α,其网络结构如图1所示。
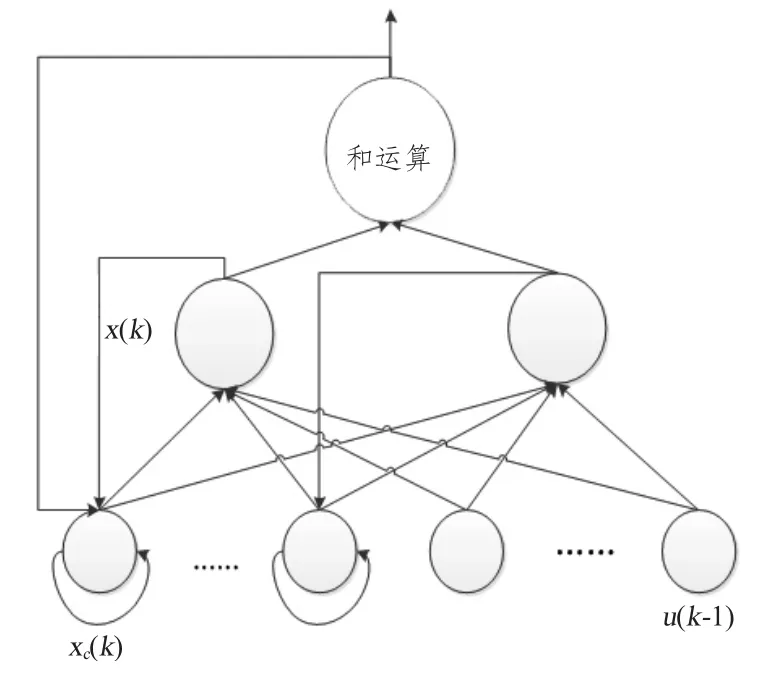
图1 RBF-Elman神经网络结构Fig.1 RBF-Elman neural network architecture
从图1 可知,除了传统神经网络输入层、隐层和输出层外,还有一个包含反馈联接层,RBF-Elman神经网络的输出是隐层的输出和,表示如下:
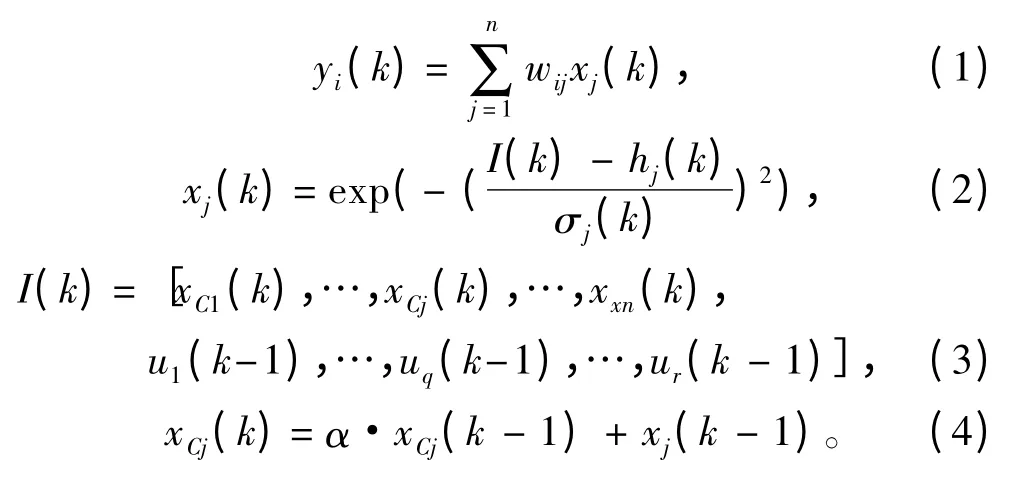
式中:i=1,…,m;j=1,…,n;q=1,…,r;wij为隐层和输出层的连接权;Yi为输出层的输出值,xj为隐层的输出值;xCj为中间联结层输出;α 为联接层的自反馈增益;I 为隐层总的输入;k 为计算次数。
实验表明,此种方式学习速度较慢,在自适应学习过程中目标函数的收敛有极值,且不稳定,难以达到预期的精确度。为了更好地进行自适应学习,本文考虑将输出层的输出信号、隐层的输出信号和输入层的信号共同作为神经网络的输入信号,即带输出反馈的RBF-Elman 递归神经网络。
输出为:

式中:β 为输出层的自反馈增益。
在带输出反馈的RBF-Elman 递归神经网络中,重点是隐层的中心点和隐层到输出层的连接权值。输入层和隐层直接输送信号,则连接权值为1。
隐层中心的求法:

对能量E 求导得:
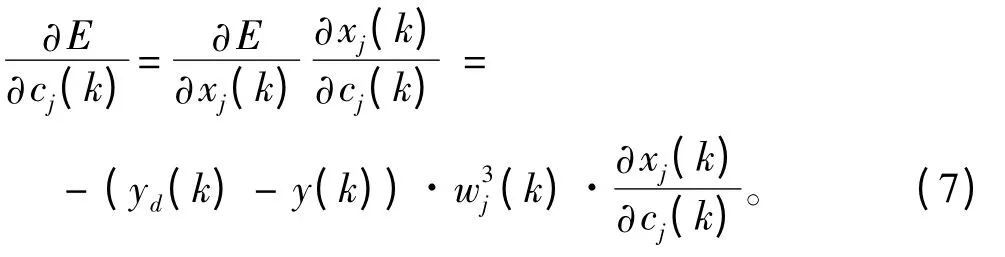

由e(k)=yd(k)- y(k)知:

隐层和输出层之间W3由下式求得:

2 带输出反馈RBF-Elman 递归神经网络对船舶操作系统的控制
带输出反馈RBF-Elman 递归神经网络具有收敛速度快、自适应能力强、自学习能力及固有的非线性等特点,将其应用到舰船的操作系统中能很好地跟踪控制舰船和辨识舰船的状态[6],其控制图如图2所示。
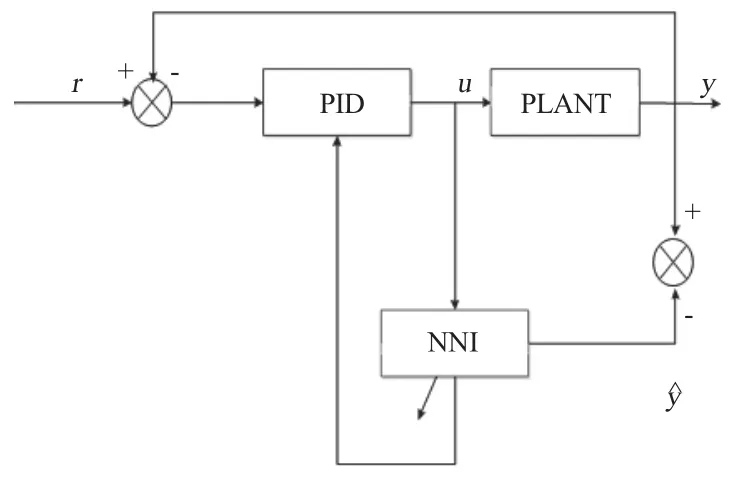
图2 带输出反馈的RBF-Elman 递归神经网络控制图Fig.2 Control charts with tape output feedback RBF-Elman recurrent neural network
图2 中:r 为输出期望值;y 为实际输出值;e 为二者的差;y^ 为神经网络输出值;u 为输入信号。
在船舶操作系统中不仅考虑船舶的航向,还要考虑船舶操作过程中的损耗,减少操舵次数,故误差指数函数可以描述为:

三层的控制参数为:
在利用带输出反馈RBF-Elman 递归神经网络进行自适应船舶操作时,可以用替代,则:

在实际工程应用中,带输出反馈RBF- Elman递归神经网络第1 部分的输入为控制量与其延迟,第2 部分和第3 部分有神经网络自学习生成。
3 实验结果
3.1 带输出反馈RBF-Elman 递归神经网络的动态辨识
利用带输出反馈RBF-Elman 递归神经网络对5 000组训练样本进行学习并进行预测,预测值和实际值的对比情况如图3和图4所示。

图3 前500 步递归算法的预测值与实际值的对比Fig.3 Compare predicted value and the actual value of the previous step 500
由图3和图4 可知,基于带输出反馈RBF-Elman 递归神经网络算法在训练初期和训练后期都能精快准地反映系统变化,有很好的预测效果。
3.2 带输出反馈RBF-Elman 递归神经网络在船舶操作系统中的应用
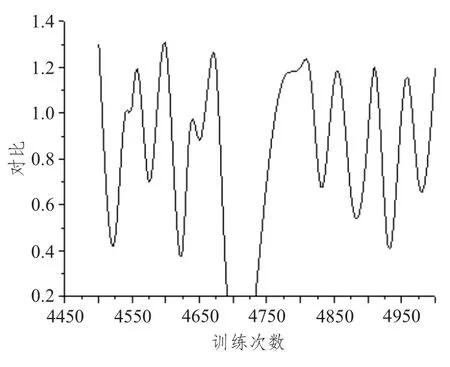
图4 最后500 步递归算法的预测值与实际值的对比Fig.4 Compare predicted value and the actual value of the last step 500
利用带输出反馈RBF-Elman 递归神经网络作为分类器进行船舶运动状态的辨别,根据参考文献[5],利用Abkowitz 模型进行试验。算法参数设置为隐层和输出层自增益各为0.4,隐层的学习步长为0.1。每隔1 s 进行1 次采样,总共1 600 s。3个输入节点,15个输入联结层,1个输出联结层,15个隐层节点,1个输出节点。对大风时船舶航向跟踪控制进行仿真,仿真结果如图5所示,传统神经网络控制跟踪是航向角变化如图6所以。
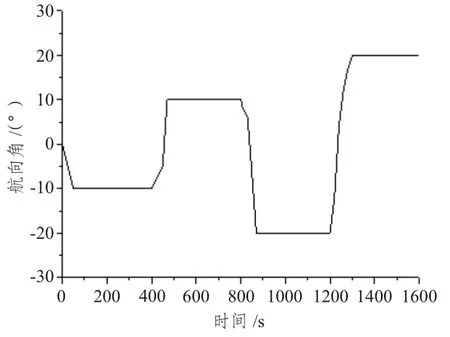
图5 带输出反馈RBF-Elman 递归神经网络控制跟踪时航向角变化Fig.5 Heading angle change with tape output feedback RBF-Elman recurrent neural network
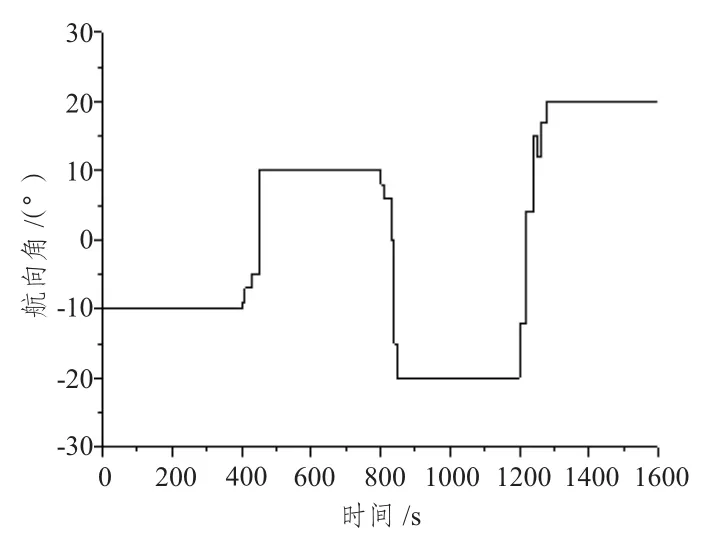
图6 传统神经网络控制跟踪时航向角变化Fig.6 Heading angle change with traditional neural network
从以上的试验结果可知,带输出反馈RBF-Elman 递归神经网络能够精快准地反映船舶的运动状态,具有自适应能力随着风浪调节航向角、跟踪效果良好及抗干扰能力强等优点,所以说带输出反馈RBF-Elman 递归神经网络在进行船舶操作控制中具有很大的应用空间。
4 结 语
本文首先在RBF-Elman神经网络结构的基础上设计了带输出反馈RBF- Elman 递归神经网络,并且通过实验验证了该算法具有收敛速度快、自适应能力强、自学习能力以及固有的非线性等特点。最后利用带输出反馈RBF-Elman 递归神经网络作为分类器进行船舶运动状态的辨别,实验结果表明此算法高效、可行。
[1]BROWN W.Factors to consider in developing a knowledgebased autopilot expert system for ship maneuvering simulation[C]//Proc.14thShip Technology and Research(STAR)Symposium,SNAME,New Orleans,USA,1989(S)5-1-11.
[2]POLKINGHOME M N,ROBERTS G N,BURNS R S.Intelligent ship control with online leaming allility[J].Computing and Control Engineering Joumal,1997:196-200.
[3]VELAGIC J,VUKIC Z,OMERDIC E.Adaptive fuzzy ship autopilot for track-keeping [J].Journal of Control Engineering Practice,2003(11):43-443.
[4]张乃尧,阎平凡.神经网络与模糊控制[M].北京:清华大学出版社,2000.
[5]贾欣乐,杨盐生.船舶运动数学模型——机理建模与辨识建模[M].大连:大连海事大学出版社,1999.
[6]詹月林.改进型PID 参数神经网络自学习的船舶操纵控制器[J].舰船科学技术,2004,26(3):21-25.ZHAN Yue-lin.The improved neural network controller of self- adjusted PID parameters for ship maneuvering[J].Ship Science and Technology,2004,26(3):21-25.
猜你喜欢
浙江大学学报(理学版)(2022年4期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
复旦学报(自然科学版)(2022年1期)2022-06-16
新世纪智能(高一语文)(2021年3期)2021-07-16
文化创新比较研究(2020年8期)2021-01-22
文化创新比较研究(2020年13期)2021-01-14
红蜻蜓·低年级(2020年2期)2020-10-27
计算机应用与软件(2020年9期)2020-09-09
民用飞机设计与研究(2019年4期)2019-05-21
人民珠江(2019年4期)2019-04-20
