
基于拓扑优化技术的光电平台弹性轴优化设计
2015-12-07 06:58柳鸣李丹妮张国玉侯升日曹维国刘英
长春理工大学学报(自然科学版) 2015年3期
柳鸣,李丹妮,张国玉,侯升日,曹维国,刘英
(1.长春理工大学 光电工程学院,长春 130022;2.长春理工大学 科学技术处,长春 130022;3.广东工商职业学院 科学技术处,广州 526020)
机载光电对抗稳定平台能实现对运动目标的快速捕获、精确跟踪和强有力干扰等功能,具备了信息化战争对武器装备的要求,属于高定向有源干扰设备,用来实现对激光制导武器欺骗、干扰、致盲、摧毁的目的[1]。光电对抗平台是集光学技术、激光技术、精密机械技术、自动控制技术、惯性陀螺技术和数字图像处理技术等多学科技术为一体的集成设备。
随着信息化装备的发展,战场情报信息的获取方式早已发展为以航空和航天侦察为主要手段,机载光电平台的相关研究日益受到重视,由于其安装在各种航天飞行器上,工作在复杂的动态环境中,常常会遭受到飞机动态环境下的振动、冲击等外界因素的影响,光电平台中安装有诸多的光电传感器,如CCD、光电陀螺、轴角编码器等,这些传感器都需要工作在相对稳定的环境下才能保持各自的测量精度,所以优良的机械结构稳定性是光电平台正常工作的基本保障,而竖直轴系形成了光电平台的方位跟踪时的旋转轴,承担着方位角的跟踪驱动和方位角位置反馈功能,也是光电平台稳定系统的重要组成,其良好的机械结构必须满足具有较高的动态刚度和强度以及体积小、重量轻等特点,以克服动态环境对探测器成像质量的不利影响[2-6]。因此有必要采用优化方法来对光电平台竖直弹性轴系进行优化以提高其动态性能[7,8]。
1 方位转台结构设计方案
根据总体性能及技术指标的要求,光电平台是由垂直轴(竖轴)和水平轴(横轴)组成的具有二维精密回转机构的吊仓式球形伺服转台。其中方位转台结构形式如图1所示。
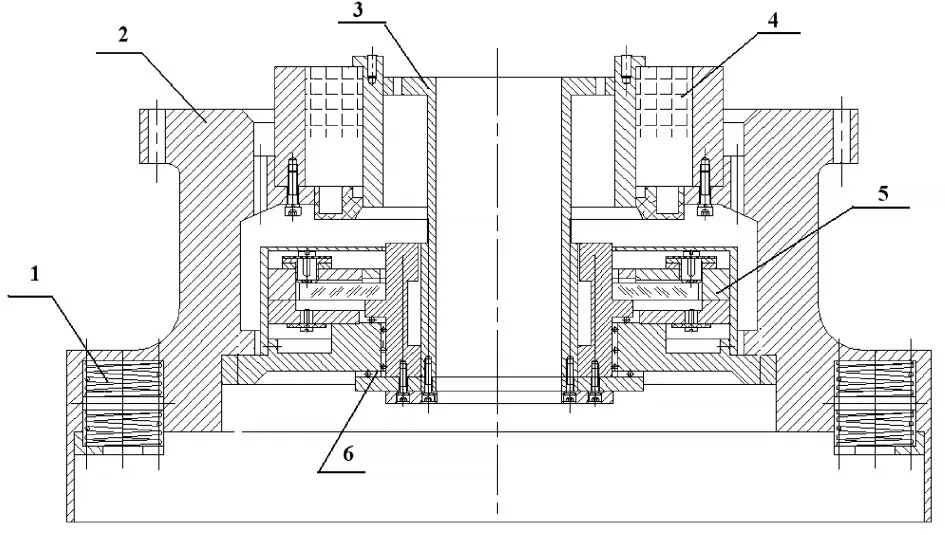
图1 方位转台结构组成
方位转台的支撑架(2)安装有减震器(1)以及具有能承受径向和止推载荷的密珠滚动轴承(6),弹性轴(3)成中空结构,作为干扰光导光管。弹性轴低端装有方位轴角编码器(5)和驱动电机(4)。轴角编码器为21位绝对式编码器(角分辨率为0.618"),驱动电机为速度可调的直流伺服力矩电机,可带动电视摄像系统等绕垂直轴转动。
2 拓扑优化求解方法
拓扑优化是选取一部分结构单元作为设计变量,求解结构刚度的最佳分布形式,以优化结构强度和刚度为前提减轻结构的重量。其基本思路是定义一个相对密度ρ∈[0,1],将优化目标用相对密度ρ的显性函数进行表示,然后运用数学规划法加以求解。以结构刚度最大为目标,以质量保留百分比为约束的变密度拓扑优化数学模型:
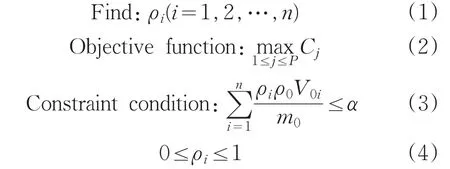
式中,ρi为第i个单元的相对密度;Cj为结构总应变;P为工况总数;ρ0为单元原始密度;V0i为第i个单元的体积;m0为结构原始质量;α为质量保留百分比。拓扑优化采用数学规划方法通过求解灵敏度构造近似显示模型,采用小步长迭代找到最优解,是目前工程应用中比较高效、高精度的优化方法,其内部优化流程如图2所示。
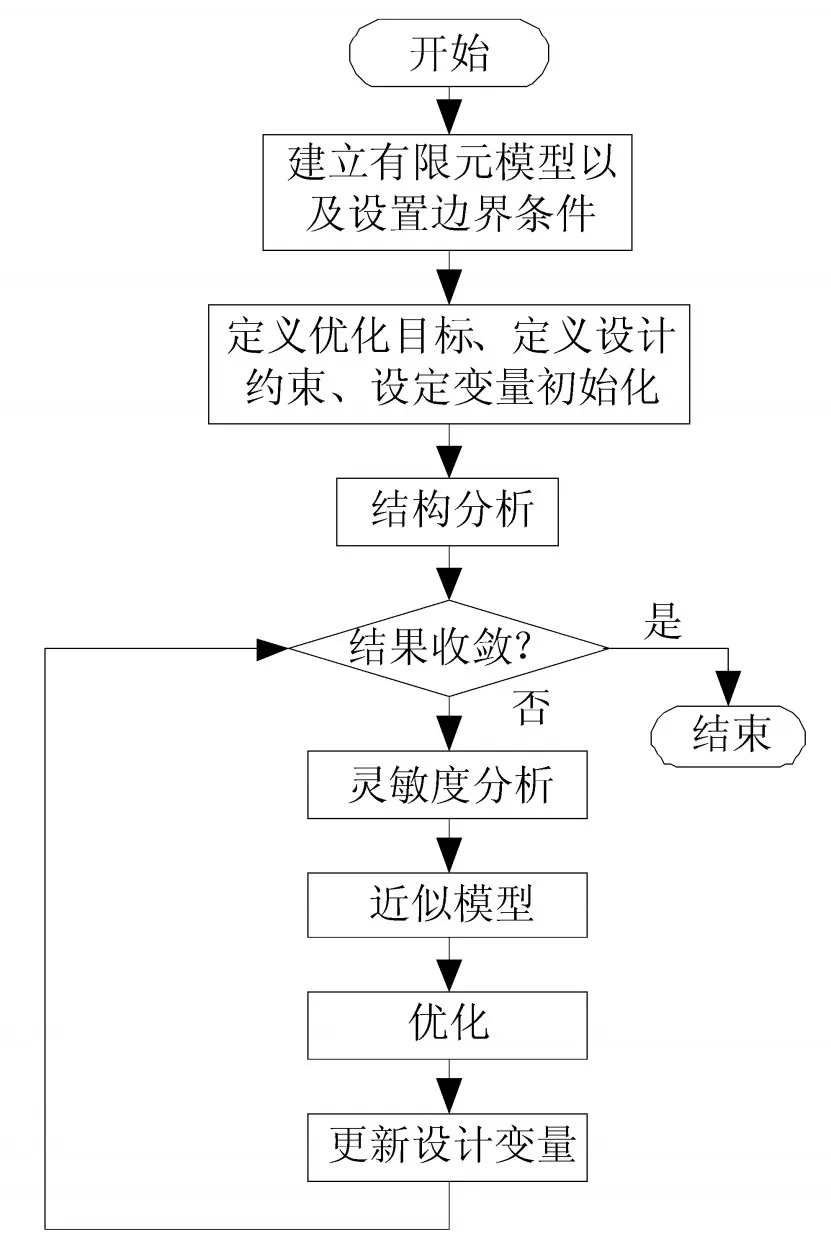
图2 拓扑优化流程图
3 基于拓扑优化技术的弹性轴挠性优化设计
在Hypermesh仿真模式下进行建模,由于弹性轴厚度一致,对弹性轴抽取中心面,并在中面上手动划分8880个面体网格,8983个节点并等效耦合节点,由于弹性轴厚度一致的特殊性,所以采用鞘单元对弹性轴进行有限元仿真建模,鞘单元计算精度更高且节省计算资源。鞘单元厚度定义为5mm。材料选取40Cr合金钢材料。依据弹性轴工作载荷状况,在有限元模型上加载如下工况作为模型分析时的载荷工况:将吊装在弹性方位转轴下方的方位旋转平台等效为一个质量点(MASS质量单元),并在软件中通过BER2刚体单元连接。在弹性轴与外框架连接位置限制三个移动自由度与三个转动自由度。施加载荷与边界条件的有限元模型如图3所示。
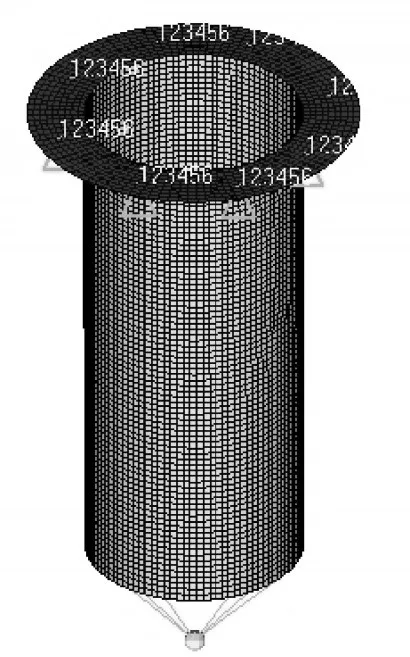
图3 弹性轴的有限元模型
完成弹性轴有限元模型建模后对其进行拓扑优化设计,首先将整个有限元模型全部定义为设计空间,以便全局寻找加强筋的放置位置。鞘单元的初始厚度为5mm,设定优化目标厚度为3mm,这样通过拓扑优化加强筋的最大高度可为2mm,即为拓扑优化加强筋的允许厚度。其次创建两个响应:第一个为频率响应,用于定义目标函数;第二个为质量百分数,用于定义约束。然后定义目标函数,设定目标使得已定义的基频数值最大化。最后定义优化约束,即质量百分数的上限值设定为0.4。完成定义优化求解问题后,在Hyperwork软件对有限元模型进行求解,通过优化准则算法计算迭代因子,并对设计变量进行更新。目标函数经过34次迭代后,得到了拓扑优化的分析结果,图4为弹性轴最佳拓扑结构形式。优化结果中红色区块代表质量密度1.0的区域(弹性轴上下区块),即需要加固的区域,在此区域中布置横、竖圈筋以提高弹性轴的强度。蓝色区块代表质量密度趋于0的区域(弹性轴的中间区块),即可以在此区域内适当的进行去重处理,同时引入挠性设计的概念,在弹性轴优化区域对称的切除环形长条圆形凹槽,即起到减振的效果,同时还可以减小温度载荷所引起的温度应力。优化后的弹性轴的有限元模型形式如图5所示。

图4 拓扑优化结果
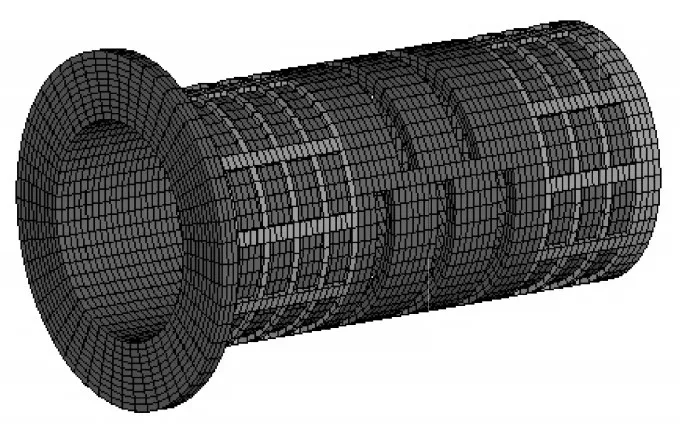
图5 优化后弹性轴的有限元模型
4 优化结果比较
4.1 模态分析
分别对优化前、后的弹性轴进行模态分析来验证优化设计的有效性。表2列出了弹性轴优化前、后的前五阶固有频率,其中基频数值由2162HZ提高至2590Hz,提高了近19.7%,前三阶的模态振形如图6和图7所示。弹性轴的的动态刚度得以一定程度的提升,有效地避开了载机激振频率和伺服系统带宽的影响,增加了系统的可调试性和抗干扰能力。

图6 优化前模态分析特征值振形

图7 优化前模态分析特征值振形

表1 优化前后弹性轴模态分析结果对比
4.2 温度应力分析
按照优化设计结果更新有限元模型,在NX NASTRAN热结构耦合分析模块对优化后的弹性轴进行热变形分析。以前面约定的工况,对弹性轴安装位置进行固定约束,并对弹性轴施加60℃的温度载荷,最后通过NASTRAN计算分析后得到竖直弹性轴在热载荷作用下优化前后位移变形云图如图8所示。从图中可以看出弹性轴在挠性设计前,所有节点最大热变形量超过0.0411mm。经过挠性设计后同工况下的最大热变形量不到0.0316mm。

图8 优化前后温度应力变形云图
5 结论
本文基于有限元分析方法,采用拓扑优化技术,通过对机载光电平台竖直弹性轴的壁厚进行优化,并进行多次迭代优化分析获得加强筋的最佳分布位置。通过对比优化前后基频模态、热应力结果表明优化后的弹性轴系在满足轴系的强度和刚度的基础上,其质量比优化前减轻了38.5%,有效地降低了结构的重量而且提高了机械结构的性能,满足了光电平台关键部件动态刚度性能优良,体积小、重量轻的技术要求。
[1]肖作江,杨成禹,杨瑞宁,等.光电对抗稳定平台强光能干扰技术研究[J].仪器仪表学报,2006,27(6):1001-1007.
[2]王涛,唐杰,宋立维.某经纬仪垂直轴系的优化设计[J].长春理工大学学报:自然科学版,2010,33(3):14-16.
[3]类成华,王守印.光电经纬仪垂直轴系优化设计[J].工程设计学报,2008,15(4):278-282.
[4]蒋丹杰,邢立坤.基于有限元的某离轴三反系统支架的优化设计[J].科学技术与工程,2010,10(17):4153-4162.
[5]王海涛,李初晔.基于力学分析的主轴轴系结构优化设计[J].设计与研究,2011(7):76-79.
[6]汪永明,鲍传辉,范同华.月球车轮腿行星机构轴系优化设计[J].机械科学与技术,2013,32(8):1225-1229.
[7]石要辉,刘顺发,向春生.光电经纬仪机架温度变形分析[J].光电工程,2013,40(6):31-36.
[8]周桂源,王娟.基于有限元法的试验机转轴动力学分析[J].机械设计与制造,2013(7):137-139.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
防爆电机(2022年3期)2022-06-17
昆明医科大学学报(2022年3期)2022-04-19
军事文摘(2021年18期)2021-12-02
军事文摘·科学少年(2021年9期)2021-10-13
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
家庭影院技术(2020年2期)2020-03-25
船舶标准化工程师(2019年4期)2019-07-24
模具制造(2019年4期)2019-06-24
舰船科学技术(2016年1期)2016-02-27
