
基于转子动能和变桨距控制的DFIG功率平滑控制
2015-12-15 10:46张晴晴牛玉广代云飞
电气自动化 2015年3期
张晴晴,牛玉广,代云飞
(华北电力大学新能源电力系统国家重点实验室,北京 102206)
0 引言
风能是一种开发成本较低、清洁、安全、可再生的能源形式,并越来越受到重视[1]。由于自然界的风速具有间歇性和波动性,随着风电场大量并入电网,输出功率的波动往往会导致电网频率的波动,影响电能质量,严重时造成电网的不稳定,因此,如何使风电机组输出的功率较为平滑成为研究热点。
输出功率的平滑控制为风电机组控制的重要环节,功率平滑控制策略主要分为两种[2]:加储能装置和不加储能装置控制策略。文献[3-5]分别加入飞轮、燃料电池、超级电容作为储能装置,但增加了风电场的投入成本。文献[6]提出了一种变桨距控制策略,但变桨距执行机构的惯性一般较大。文献[7]利用风电机组转子动能,这种控制策略利用系统的能量守恒来平滑输出功率波动。
在风速变化较快时,由于变桨距执行机构惯性较大,仅仅通过变桨距控制调节发电机输出功率,很难达到理想效果;而仅使用转子动能控制牺牲功率则较多,本文提出了一种在全风速范围内转子动能控制和变桨距控制相结合的功率平滑控制策略,该控制策略在全风速范围内控制桨距角大小,并利用发电机组转子的动能来平滑输出功率。将该控制策略应用在实验室开发的风力发电机组半物理实时仿真平台上,控制效果理想,验证了该控制算法平滑输出功率波动的有效性。
1 输出功率平滑控制策略
传统的MPPT控制策略是:额定风速以下,桨距角保持不变,每一个确定风速都对应有最大输出功率Pmax;额定风速以上,通过调节桨距角的大小使风力发电机组输出功率保持在额定值附近。
1.1 转子动能控制
风速波动时,风机输出功率也会相应的波动。假设Pwave为风机一段时间内在MPPT控制策略下输出的平均功率。由于风速和风能利用系数变化而引起的风能波动ΔEw为:

这部分风能的波动导致了输出功率的波动,平滑控制策略的提出就是为了平滑这部分由于风能波动所导致的输出功率波动。当风机产生功率大于Pwave时,风机的转速变大,转速增加所产生的一部分动能储存在转子端;当风机产生功率小于Pwave时,为保证输出功率平稳,储存在转子端的动能减小,风机的转速变小。平滑控制策略就是将发电机转子看作虚拟的储能装置,其储存的能量可以用来补偿输出功率的波动。
采用上述输出功率平滑控制策略,风机不是工作在MPPT相应的最大功率点上,所以输出功率的平均值小于Pwave。假设输出功率Pw=K*Pwave,其中K用来表征系统的效率,K<1,K值越大,系统的效率越高,反之亦然。ωw为风机的转速,其与风机输出功率和转矩关系为:Tw=Pw/ωw

图1 K值不同时风机转矩和转速关系[7]
如图1所示,当K=1时,风机转矩和转速关系曲线同MPPT控制策略下曲线有一个交点,此时,风机的转子端没有动能来补偿由于风速波动引起的功率波动,功率输出依旧波动较大。当K=0.9时,相应的曲线有两个交点,对应的风机的转速分别为ωmax,ωmin,此时转子端可以用来补偿功率波动的动能大小为:

其中J为风机的转动惯量,要平滑风能波动所导致的输出功率波动,公式(2)所得的动能要大于或等于公式(1)中风能波动,由此可得当0<K≤0.97时,转子端有足够的动能来平滑输出功率的波动。
为平滑风力发电系统的输出功率,首先要计算出风力发电机组在MPPT控制策略下的输出功率值Pmax,再求出风机一段时间内在MPPT控制策略下输出的平均功率Pwave。

式中t为当前时间,T指求平均值的积分时间。根据式(4)可求出用来平滑风力发电机组输出功率波动的转子端所储存的功率大小ΔP为 :

风机功率平滑策略下,风力发电机组的能量公式如下所示:

经过上式变换实现了转速的平滑,且该平滑的转速ωsmooth为:

1.2 变桨距控制
传统MPPT控制策略中,当风速高于额定值时,变桨距控制启动,使输出功率稳定在额定值附近。功率平滑控制策略中,当风速小于额定值时,发电机给定功率值偏离了机组最佳功率的最大值,所以要调节桨距角来控制汲取的风能,这样才能保证功率的平衡。本文设计的变桨距控制系统控制框图如图2所示。

图2 变桨距控制系统控制框图
如图2所示,ωw为风机的实时转速,ωref为风速高于额定值时的转速参考输入值,ωsmooth为风电机组的平滑转速。该控制系统中,在额定风速以上和以下分别设计了不同的PI控制器,可保证在风速超过额定值时,风机的转速保持在额定值附近。风速低于额定值时,实时转速可以跟踪相应的平滑转速。
1.3 输出功率平滑控制策略
传统的MPPT控制策略中,发电机有功功率的给定值与发电机组转速的三次方成正比,这就导致了输出功率给定值的波动。本文的功率平滑控制策略在全风速范围内结合变桨距控制和转子动能控制,本质是通过给定风电机组平滑的输出功率值实现平滑控制。图3所示为DFIG输出功率平滑控制策略的控制框图。
图3中的变桨距控制系统采用图2的控制系统,当风速小于额定值时,风力发电机组的转速ωw经过转子动能控制得到平滑的输出转速ωsmooth,风机的实时转速和该平滑转速的偏差Δωa作为桨距角控制系统的输入值,使风机的转速可以跟踪平滑转速ωsmooth;ωref为额定风速相对应的转速值,当风速高于额定值时,实时转速和ωref的偏差Δωb作为桨距角控制系统的输入值,可保证风机转速维持在额定值附近。
上述所得平滑输出转速可得相应平滑输出功率,该功率可作为输出功率给定值来参与风电机组的功率控制。总之,经过输出功率平滑控制,可实现转速闭环、平滑控制,且实现了全风速范围的桨距角控制。

图3 DFIG输出功率平滑控制策略控制框图
2 风力发电机组半物理实时仿真平台
风力发电机组半物理实时仿真系统是利用硬件在环仿真技术,在实验室开发的全数字化的风电系统实时仿真平台,可在实验室环境下快速的开发和验证控制算法,使得控制器在进行真实机组测试之前就能够进行全面的闭环测试,从而能够控制风机的输出功率,为风电场优化调度提供基础研究平台。
风力发电机组半物理实时仿真系统进行多核平台的并行运行。主要由上位机、路由器、风力发电机组仿真器、风力发电机组变流控制器、风力发电机组主控器组成,如图4所示。上位机监控界面用于人机交互,用户可设定仿真环境条件和进行仿真操作。路由器用于将仿真系统组成局域网以进行数据交换。仿真器用于运行实时风机整机模型,包括机械模型和电气模型。变流器用于运行实时的变流控制模型,对仿真器的电气模型进行控制。主控器运行实时的主控模型,对仿真器的机械模型进行控制,调节变桨。
3 仿真验证及结果分析
为验证所提出的功率平滑控制策略的正确性,在风力发电机组半物理实时仿真平台上搭建风机模型,仿真系统中,桨叶半径:35 m/s、空气密度:1.25 kg/m3、机组转动惯量 390 000 kg·m2。
为评价平滑控制策略的有效性,本文以输出功率的标准差σ来表征其平滑程度,该值越小表明输出功率波动越小,平滑性越好。以输出功率的平均值Pmean来表征控制系统的效率,Pmean值越大表明控制效率越高,其中n为采样次数,Pi为第i此采样的输出功率值,本文中采样次数n取100,表达如下所示:

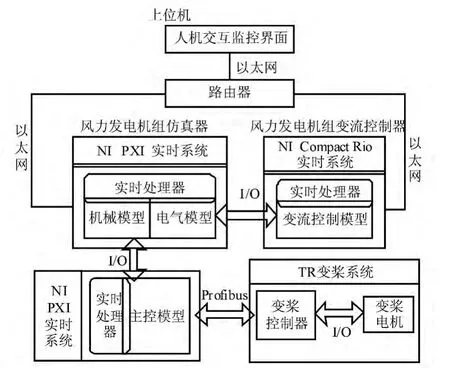
图4 风力发电机组半物理实时仿真平台总体结构图

图5 实时风速曲线
系统中额定风速为12 m/s,模拟的实时风速v=12±Δv,Δv为 0~6 m/s之间的随机风速,如图5所示。
在此风速下,输出功率的传统MPPT控制和平滑控制相应的仿真曲线如图6所示。
由上图中的实时仿真曲线可见,MPPT控制策略下,输出功率的尖峰较多,表明波动较大,而在功率平滑策略中,尖峰明显减少且幅值减小,功率波动显著减小。
图7、图8为在MPPT控制策略和平滑控制策略输出功率的标准差和平均值曲线。
由图7可以看出,与传统的MPPT控制策略相比,平滑控制策略的标准差值σ明显偏小且随着K值的减小而减小,也就是说平滑控制算法中,K值越小,输出功率越平滑。由图8可知,MPPT的输出功率平滑值较平滑控制策略打,但随着K值的减小,平均值变小。综上可知,传统的MPPT控制策略虽然最大程度的捕获了风能,但是输出的功率波动较大;平滑控制策略中虽然牺牲了一部分功率,但却得到了平滑的输出功率,且K值越小,输出功率波动越小。
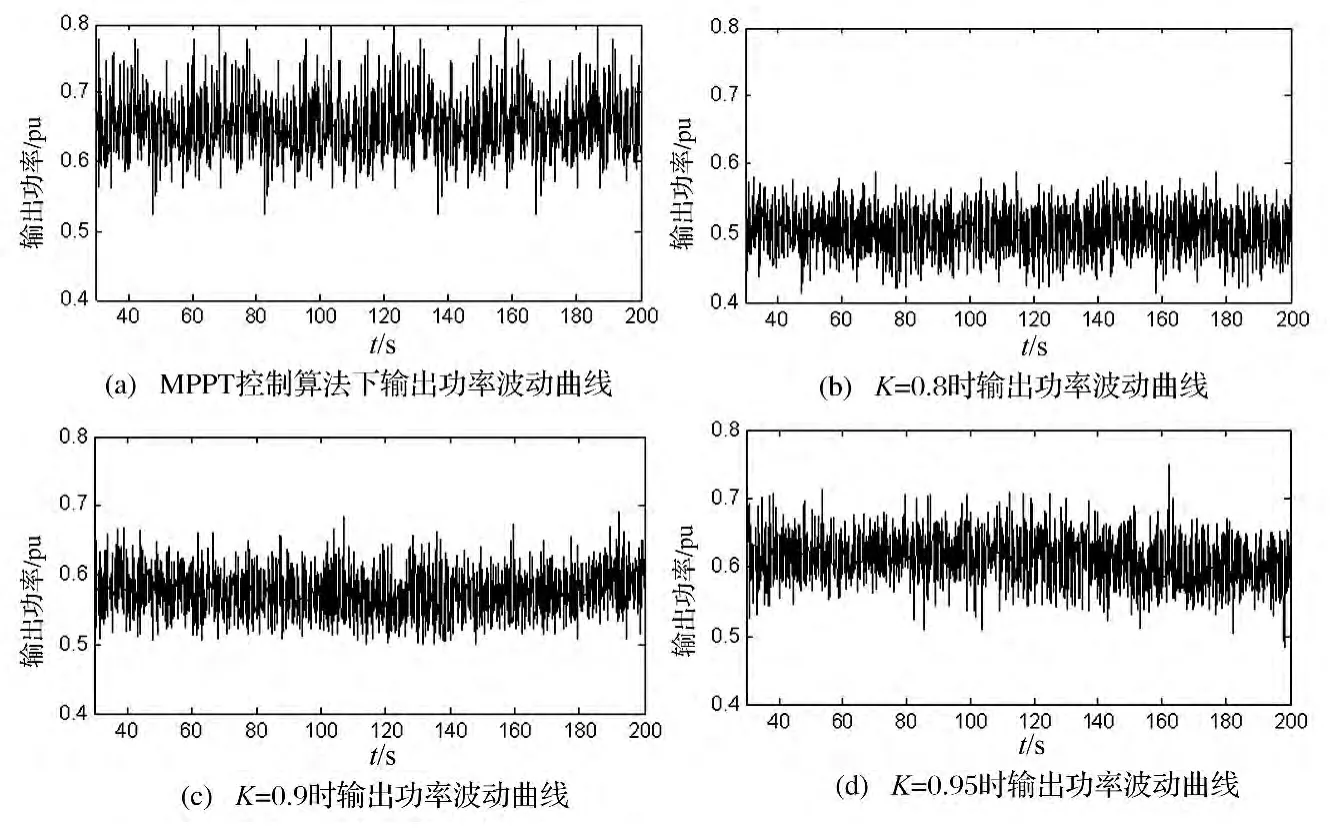
图6 不同控制策略下输出功率波动曲线
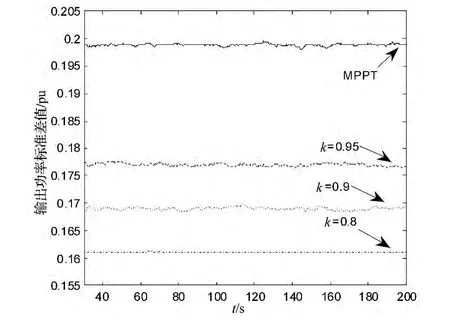
图7 输出功率标准差曲线

图8 输出功率平均值曲线
4 结束语
风力发电机组半物理实时仿真平台仿真结果表明,功率平滑控制算法在没有添加任何电力电子等原件的情况下,通过在全风速范围内结合变桨距控制和转子动能控制,可以有效的抑制因风速的不确定性而导致的功率输出波动。该控制算法结构简单,无需添加任何辅助设备,抑制输出功率波动效果显著,但同最大风能追踪控制策略相比需要牺牲一定的输出功率。
[1]陈波,吴政球.基于约束因子限幅控制的双馈感应发电机有功功率平滑控制[J].中国电机工程学报,2011,31(27):130-136.
[2]HOWLADER AM,URASAKI N,YONA A,et al.A review of output power smoothing methods for wind energy conversion systems[J].Renewable and Sustainable Energy Reviews,2013,26(25):135-136.
[3]CÁRDENAS R,PENA R,ASHER G,et al.Power smoothing in wind generation systems using a sensorless vector controlled induction machine driving a flywheel[J].IEEE Transactions on Energy Conversion ,2004,19(1):206-216.
[4]IQBAL M.Modeling and control of a wind fuel cell hybrid energy system[J].Renewable Energy,2003,28(2):223-237.
[5]MUYEEN S,TAKAHASHI R,MURATA T,et al.Integration of an energy capacitor system with a variable-speed wind generator[J].IEEE Transactions on Energy Conversion,2009,24(3):740-749.
[6]YAMAZAKI T,TAKAHASHI R,MURATA T,et al.Smoothing control of wind generator output fluctuations by new pitch controller[C].Proceedings of 18th International Conference on Electrical Machines,IEEE ,French,Sept.6-9,2008.
[7]ABEDINI A,LUU T,NASIRI A.A novel speed control algorithm for PMSG wind turbines aimed at output power smoothing[C].Proceedings of the Electrical and Computer Engineering,IEEE,Canada,May.4-7,2008.
猜你喜欢
山东冶金(2022年4期)2022-09-14
太阳能(2022年2期)2022-03-07
哈尔滨轴承(2020年3期)2021-01-26
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
中国学术期刊文摘(2016年2期)2016-02-13
新疆钢铁(2015年3期)2015-02-20
燕山大学学报(2014年2期)2014-03-11
