基于Petri网的终端区冲突避免方法研究*
2015-12-17 03:59陈平任民
舰船电子工程 2015年3期
陈 平 任 民
(1.武汉数字工程研究所 武汉 430205)(2.海军指挥学院 南京 210016)
基于Petri网的终端区冲突避免方法研究*
陈 平1任 民2
(1.武汉数字工程研究所 武汉 430205)(2.海军指挥学院 南京 210016)
终端区空域结构复杂,航空器飞行架次过多,是飞行事故高发区,针对该问题,提出一种基于Petri网的终端区冲突避免方法。首先分析终端区空域运行结构,利用Petri网建立终端区空域运行模型,并根据终端区空域管制规则,建立其约束模型。然后综合约束模型,利用库所不变量方法建立终端区空域控制策略。最后针对控制策略进行案例分析,结果表明,此方法能够有效解决终端区空域运行安全问题,减轻管制员负荷。
终端区; 冲突; Petri网; 控制策略
Class Number TP393
1 引言
随着航空事业的发展,飞行架次日益增多,终端空域航线日趋密集,必须对终端空域运行施加控制,否则极易产生飞行冲突事故,严重可能导致撞机等恶性事件。为解决这一难题,国内外已有一些专家学者对相关问题进行了研究。Tang等通过利用混杂理论建立了航空器飞行全过程剖面,对航空器4D轨迹进行预测,并重点对可能产生的飞行冲突进行了分析,设计了相关控制策略,但其未针对终端区空域飞行冲突防御进行研究[1]。Harry等通过实时监控空域中航空器飞行轨迹,利用动力学模型对航空器飞行航迹进行短期预测,并对可能产生的飞行冲突进行提前调配,但未能对航母进近管制空域冲突避免进行研究[2]。张众等通过结合进港排序方法得出终端区冲突解脱策略,解决了终端区飞行冲突调配问题[3]。李忠诚等研究了终端区飞机进近过程中排序和冲突解决的调度算法,使到达飞机流能够快速有序地进入机场着陆[4];秦瑛利用离散事件系统理论对机场终端区作业流程进行了建模[5]。文献[3~5]研究重点在终端区安全前提下进行航班排序或对已经产生的冲突进行调配,并未研究如何防止航空器飞行产生冲突。
综上所述,以往文献更多集中在飞行冲突发生前的预警和冲突发生后的调配,而未针对如何防止冲突发生进行过多研究,本文拟利用Petri网对终端空域运行结构进行建模,分析出航空器在终端空域运行特点,并根据管制规则对航空器运行施加约束,生成航空器安全运行策略,实现终端空域冲突防御。
2 终端区运行模型
为不失一般性,本文以典型终端区结构为研究对象,如图1所示。整个终端区有若干等待区,航空器在该区域等待进入进近,利用离散化思想,可将整个终端区航段分为若干航段,利用Petri网对其进行建模。

图1 终端空域运行结构图

图2 终端空域运行简化模型N
定义1 终端区运行模型。终端区运行Petri网模型定义为N=(P,T,Pre,Post,m),其中:P为库所集合,P={p1,p2,…,pi…};T为变迁集合,变迁,T={t1,t2,…,ti…};Pre表示P×T的流关系,其权重wpre=1;Post表示T×P的流关系,其权重wpost=1;m为状态标识,可反映终端区内航空器的分布态势。
将等待区1、2、3、4分别映射为库所p1,p4,p5,p8,对应的进近航段分别映射为p2,p3,p6,p7,p9,p10,复飞航段映射为p11,跑道映射为p12,p13表示航空器已经到达滑行道位置。
通过对终端空域结构和航空器进近特点进行分析,库所p2,p3,p6,p7,p9,p10,p11,p12对应的航段为进近关键区域,要求任意时刻只能有一架航空器进行着陆,故可以对航空器终端区运行模型进行简化,以库所p0表示库所p2,p3,p6,p7,p9,p10,p11,p12映射的区域,如图3所示为航空器终端区运行简化模型N。
3 终端区运行约束模型
根据航空器在终端区的安全飞行要求和对应的管制规则,可建立终端区运行约束模型以保证航空器在终端区飞行安全可靠。
3.1 线性不等式约束模型
根据管制规则禁止行为可被描述为网标识的加权和不超过某一上限,故可利用线性不等式建立其约束模型,可表示为l·m≤b,其中,l是标识加权矩阵;m为标识向量;向量b为标识加权和的常量。在终端区主要有以下约束:
约束1:为保证航空器降落安全,要求同一时刻进近航段内只有一架飞机,其对应的控制规范可以建立为
m(p0)≤1
(1)
约束2:为保证航空器在等待区域内安全,要求任一等待区域内同时最多只能有n架航空器:
(2)
3.2 优先等级约束模型
根据线性不等式约束模型可防止终端区运行进入禁止状态。但在进近区域航段清空,允许其他航空器降落时,存在两架或多架航空器同时请求进入该区域的状况,为解决这类问题,提出一种基于优先级的控制策略。
针对活动运行模型N,对每个变迁t∈T都赋予一个正整数pr(t)。对于ti,tj∈T,如果pr(ti)>pr(tj),则变迁ti比变迁tj有优先发生权。
约束3:根据管制要求,等待区之间存在优先级关系,可对运行模型添加约束:
pr(t2)>pr(t3)>pr(t6)>pr(t7)
(3)
4 标识运行控制策略
针对线性不等式约束模型,本文采用一种库所不变量的方法设计控制器[7],该方法的思想是把线性不等式约束中的库所和外加的控制库所作为闭环控制系统期望的库所被某一不变量覆盖。其方法具体如下:
针对每个约束不等式增加一个控制库所pc,其初始标识由被控子网的初始标识确定:
m0(pc)=b-lm
(4)
控制器库所pc和约束变迁的关联矩阵Dc可以通过被控对象的关联矩阵D确定:
Dc=-lD
(5)
例1 以约束1模型为例,采用库所不变量方法对运行模型进行控制器综合。

图3 库所不变量方法控制器综合
步骤1:确定约束库所集Ps、约束变迁集Ts和关联矩阵D。
步骤2:添加控制库所pc,根据式(4)可推出控制库所初始标识为:m0(pc)=1。
步骤3:确定控制库所关联矩阵Dc,根据式(5)可推出Dc为:Dc=[1 1 1 1 -1]。
步骤4:基于关联矩阵Dc,对运行模型进行控制器综合,如图3所示。
5 控制算法及案例分析
为防止终端区内冲突事件发生,本文提出一种基于变迁状态决策控制指令的方法,通过将决策出航空器运行控制指令发送至航空器,飞行员可根据控制指令操作,以防止终端区入侵事件。
定义1 航空器运行控制指令集对终端区运行模型,定义航空器运行控制指令集为N={fly,wait},其中fly为航空器许可进入下一阶段指令,wait为航空器等待指令。
根据航空器运行控制指令决策方法,可定义如下映射:


表1 航空器运行控制指令决策模型
例2为验证控制方法可行度,以图1所示案例为例。
步骤1:建立整个终端区运行模型N。
步骤2:根据终端区运行模型N,针对约束1,2,和3构建其约束模型,建立含控制器的终端区运行模型。
步骤3:通过雷达等信息获取途径,确定当前场面的标识状态m。可确定例题当前标识为:m(p1)=1,m(p4)=1,m(p8)=1,m(p0)=1,其余皆为0。
步骤4:基于标识信息m,根据变迁的使能规则,可确定当前各个变迁的使能状态为1或0。可确定当前变迁为:E(t2)=0,E(t3)=0,E(t6)=0,E(t7)=0,E(t14)=1。
步骤5:根据当前各个变迁状态和航空器运行控制指令映射规则,确定航空器运行控制指令。可知当前状态下航空器1、2、3接收到的控制指令为wait,故航空器1、2、3依然在空中等待,而航空器4接收到的控制指令为fly,则其继续飞行。
步骤6:回到步骤3,待航空器4飞行降落到滑行道以后,通过雷达等信息获取途径,当前场面的标识状态m1。可确定:m1(p1)=1,m1(p4)=1,m1(p8)=1,m1(p13)=1,其余皆为0。
步骤7:基于标识信息m1,根据变迁的使能规则,可确定当前各个变迁的使能状态为1或0。可确定当前变迁为:E(t2)=1,E(t3)=0,E(t6)=0,E(t7)=0。
步骤8:根据当前各个变迁状态和航空器运行控制指令映射规则,确定航空器运行控制指令。可知当前状态下航空器1接收到的控制指令为fly,航空器2、3接收到的控制指令为wait。
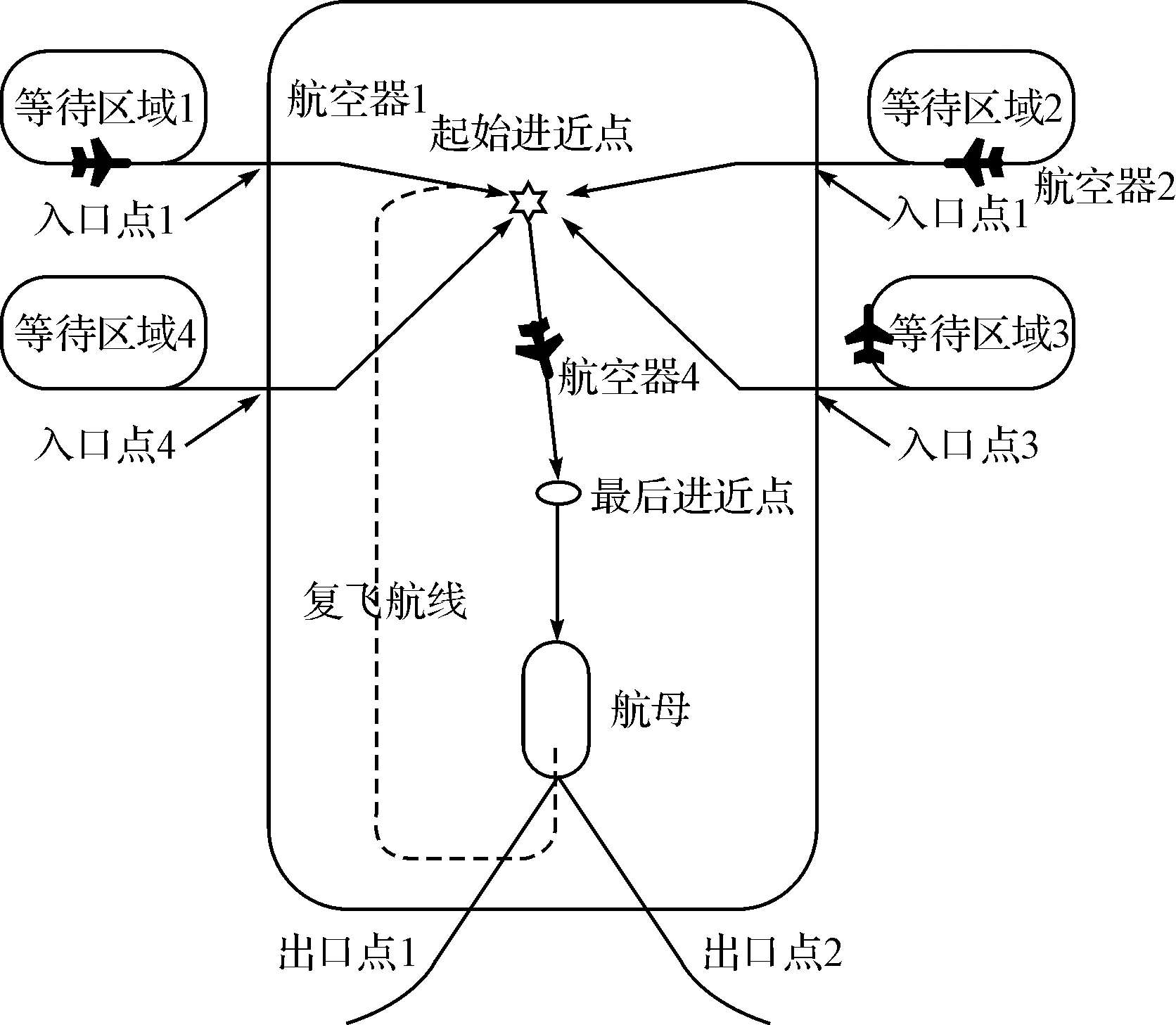
图4 航空器1开始进近着陆示意图
步骤9:回到步骤3,航空器1飞行进入进近航段,开始下滑进入跑道,而航空器2、3依然等待,如图4所示。通过雷达等信息获取途径,确定当前标识状态为m2。可知:m2(p1)=0,m2(p4)=1,m2(p8)=1,m2(p13)=1,m(p0)=1,其余皆为0,如图5所示。
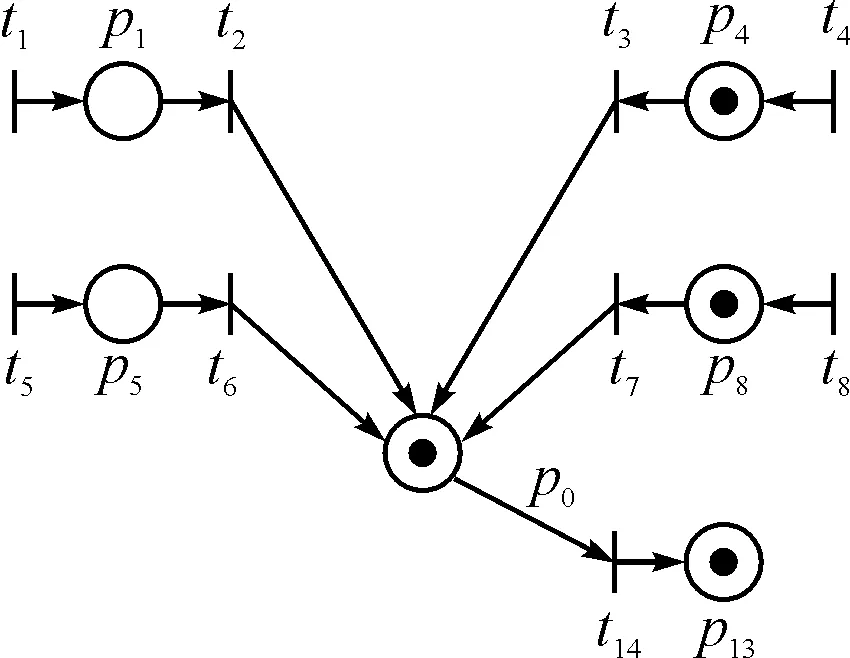
图5 标识状态m2
6 结语
本文通过分析终端区空域运行结构,利用Petri网理论建立终端区空域运行模型,并针对终端区管制规则,建立其约束模型。然后利用库所不变量和禁止弧方法制定终端区控制策略,通过案例分析可知,该控制策略能够实现终端区空域的安全运行,减轻管制员工作负荷。
[1] Tang X M, Han Y X. 4D trajectory estimation for air traffic control automation system based on hybrid system theory[J]. PROMET-Traffic & Transportation,2012,24(2):91-98.
[2] Harry Swenson, Richard Barhydt, Michael Landis. Next Generation Air Transportation System Air Traffic Management Airspace Project[R]. NASA,2006:1-43.
[3] 张众,张学军,孙富春,等.结合进港排序的终端区冲突解脱策略研究[J].计算机工程与应用,2010,32:205-208.
[4] 李忠诚,徐肖豪.进近过程中的排序和冲突解决算法研究[J].中国民航学院学报,2004(3):6-10.
[5] 秦瑛.机场终端区作业的离散事件系统建模与优化[D].天津:中国民用航空学院,2006.
[6] 韩超,王赢.一种基于改进PSO的无人机航路规划方法[J].舰船电子工程,2014(4):49-53.
[7] 王寿光.基于简化技术的离散事件系统控制器的综合[D].杭州:浙江大学,2005.
[8] 郭江龙,郭英,尹成义,等.水面舰艇编队海上作战中威胁扇面内涵分析[J].舰船电子工程,2013(11):30-31,136.
[9] 桑亮.视觉条件对航空器着陆终端误差影响研究[J].舰船电子工程,2014(5):144-148.
Research on Conflict Preventingmethod Based on Petri Net
CHEN Ping1REN Ming2
(1. Wuhan Digital Engineering Institute, Wuhan 430205)(2. Navy Collage of Command, Nanjing 210016)
The structure of terminal airspace which is the high incidence of accidents is complex, and aircraft flying sorties over. To solve this problem, a method is proposed to avoid the terminal area airspace conflicts based on Petri net. The operation model of terminal area airspace based on Petri nets is established according to the terminal area airspace operation structure firstly, and the constraint model of terminal area is established according to the rules of terminal area operation. Then the marking control model is transformed into the state prohibits problem to design controller, and the priority control strategy is put forward according to disable concurrency events. A simulation example demonstrates the effectiveness of the control strategy which can solve the conflict of terminal area.
terminal area, conflict, Petri net, control strategy
2014年9月13日,
2014年10月30日
陈平,男,硕士,研究方向:新一代空管自动化系统。任民,男,副教授,研究方向:兵种指挥,航空兵管制运行。
TP393
10.3969/j.issn1672-9730.2015.03.007
猜你喜欢
西华大学学报(自然科学版)(2022年2期)2022-03-17
装备维修技术(2021年37期)2021-11-03
航空发动机(2020年6期)2021-01-12
航天制造技术(2020年6期)2021-01-05
华侨大学学报(自然科学版)(2020年1期)2020-02-27
现代电子技术(2019年15期)2019-08-12
计算机系统应用(2018年2期)2018-03-02
北京航空航天大学学报(2017年4期)2017-11-23
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10