
潜艇垂直面舵桨联合操控仿真
2015-12-19 08:36刘可峰姚宝恒侯家怡
舰船科学技术 2015年6期
刘可峰,连 琏,姚宝恒,侯家怡
(1.上海交通大学 船舶海洋与建筑工程学院 海洋工程国家重点实验室,上海200240;2.江苏科技大学 船舶与海洋工程学院,江苏 镇江212003)
0 引 言
潜艇在执行一些特定任务时,经常需要以较低速度航行,低速航行时舵效差,舵力及力矩小,尾舵处于逆速状态,使得垂直面的操纵比较困难,特别是潜艇在水下发射潜射弹道导弹,不仅处于较低的航速,而且潜艇在导弹发射时受到短促而极大的发射反向冲击力,使潜艇的姿态产生巨大变化,而此工况对潜艇的深度和姿态都有较高要求,研究此时潜艇垂直面的操纵问题将对潜艇的实际操纵具有重要意义。
目前,国内对于潜艇操纵控制和发射潜射导弹做了许多研究。胡坤等[1]对在水下破损潜坐海底时的潜艇操纵控制做了研究。颜俐等[2]研究了尾舵独立控制的潜艇垂直面运动仿真,王亚东和倪火才[3-4]进行了潜射导弹发射过程中的载荷研究,程嘉欢等[4]对发射潜射导弹的潜艇进行运动仿真研究,但对于导弹发射时潜艇的垂直面操控研究还比较少,低速运动潜艇的操纵控制也比较困难。
本文分析潜艇在水下垂直发射导弹时的载荷情况,基于Gertler 六自由度标准运动方程,建立潜艇低速运动仿真模型,针对导弹发射时潜艇低速运动的姿态问题进行深入分析,在此基础上加入垂直面辅助推进器来改善垂直面的运动性能,并进行垂直舵桨的联合操纵控制研究。
1 潜艇低速运动模型
潜艇有多种特殊作业工况需要以较低速度航行,其中以水下发射潜射导弹的作业工况最为恶劣,需承受急促而巨大的外力,同时却要求保持一个较好的潜艇姿态。仅仅依靠围壳舵或首升降舵和尾升降舵来控制潜艇的深度和姿态,整个姿态回复过程需要较多时间,为此可引入垂向的辅助推进器,从而很好地加强潜艇垂直面的回复能力。分析此时的运动模型,除了常规的潜艇水动力载荷外,需要重点分析潜射导弹的发射反力和垂向推进器推进力。
1.1 潜射导弹发射时潜艇受力分析
根据潜艇的受力特点,整个导弹发射过程主要分以下3 个阶段[5]:
第1 阶段是导弹发射时的反向冲击力。从导弹点火开始直到导弹离开发射筒,在高温高压燃气的作用下,发射筒底部和筒口周围艇甲板受到一股反向冲击力,其特点是作用时间短、压强大,并随着与筒口距离的增大而减小,随着导弹出筒而迅速减小。
第2 阶段是混合燃气迅速扩散造成的负压。从导弹离开发射筒开始,到海水开始进入发射筒之前,筒内聚集的高压混合燃气膨胀溢出,在惯性作用下在发射筒口附近相当区域上出现短暂负压。
第3 阶段是海水的灌冲力。导弹刚离开发射筒而海水尚未灌入时,潜艇发射筒形成负压区域,在负压和重力的共同作用下,海水以剧烈的脉动压力灌入发射筒内,形成“水锤”压力。由于惯性的作用,发射筒内外的水来回震荡,形成脉动的水锤压力曲线。水锤压力数值较大,有些工况下第一个压力峰值甚至超过反射反冲力,将对潜艇的垂直面运动造成较大影响。
在脉动压力逐渐衰减后,由于注入的水重量和导弹重量之差还存在一个压力常值。各阶段压力叠加后形成一个发射反力的合力,其最主要的是垂向力,其他2 个方向的力较小可忽略其影响,表示为[0,0,ZL]T,相应的力矩可以同样的形式表示为:

式中:ZL为潜艇所受垂向力;yL和xL分别为ZL距离潜艇重心的Y 向和X 向距离。
1.2 垂向推进器推力分析
潜艇正常航行时垂向速度分量较小,若安装垂向推进器,则基本工作于系柱工况,其工况与船舶首部侧向推进器和潜器的推进器类似,故选用潜器上常用的等厚导管螺旋桨[6],能够在低进速工况下发出较大的推力。导管螺旋桨的推力和扭矩依靠相应的推力和转矩系数来计算:

式中:ρ 为流体密度;n 为螺旋桨转速;D 为螺旋桨直径;KT和KQ分别为导管桨的推力和和转矩系数,可以根据已发表的相应导管桨系数图谱来量取。
1.3 舵桨联合操控的垂直面运动方程
分析潜艇所受发射作用反力,主要是受到垂向力和相应力矩的作用,由于作用合力和潜艇重心Y 向距离相对较小,又可以作进一步的简化,潜艇主要在升沉和纵摇方面受到较大的影响。在标准运动方程基础上,加入前面的发射反作用力和垂向推进器推力,以及相应的力矩,就可以得到该工况下潜艇的垂直面运动方程。
为研究统一性,本文的坐标系、名词和符号均采用国际水池会议(ITTC)推荐的坐标系统,潜艇运动模拟通常采用惯性坐标系和随动坐标系2 套坐标系统,分别用于潜艇运动的水动力特性和轨迹姿态模拟。
潜艇水下低速运动时的操纵数学模型沿用格特勒潜艇标准运动方程,潜艇水下空间运动方程概括起来包含3 个轴向移动方程和3 个绕轴向转动方程,其中潜艇水下垂直面操纵运动是有关航行安全的重要研究部分[7]。在研究潜艇所受发射反力的基础上,可以发现其对潜艇的姿态和深度影响较大,研究的重点是潜艇垂直面方程,其动力学方程为:

式中:m 为潜艇质量;Iy为潜艇对Gy轴的转动惯量;u,w,q 分别为潜艇的纵向速度、垂向速度和纵倾角速度;分别为潜艇纵向加速度、垂向加速度和纵倾角加速度;δb和δs为首升降舵角和尾升降舵角;θ 为纵倾角;P 为静载荷;ZL和ML为导弹发射反力及力矩;TZ为垂向推进器推力;其他均为潜艇水动力系数。
2 仿真实例
2.1 仿真模型建立思路
导弹发射的反向冲击非常大,该反作用力及力矩将引起潜艇运动状态较大的变化,通常潜艇将下沉1 ~2 m 深度,该反力及力矩大小随时间而变化。由于作用时间短,常用的一种简化处理方法是把冲量作为其作用时间内的平均力。为完整反映出发射作用过程的复杂性,根据前述3 个阶段的受力分析,按照时间先后顺序将它们串联成一个随时间变化的外力曲线。通常导弹发射后还需通过吹除补重水舱等方式来平衡静载荷,将其作用合并后作为总的合外力加入到运动方程中,如图1 所示。
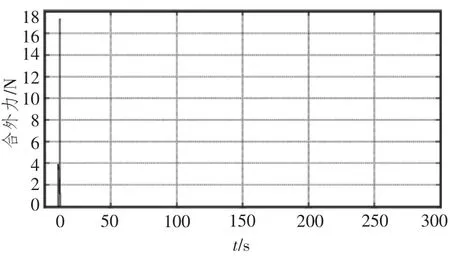
图1 合外力曲线Fig.1 The summed force curve
在水下一定深度发射大型导弹,潜艇将受到巨大的冲击载荷作用,并且对潜艇运动状态提出了很高的要求。通常此时潜艇航行于水下20 ~30 m 的深度,此时可以忽略自由水面对其的影响。为减少对所发射导弹姿态的影响,此时潜艇航速比较低,一般为2 ~4 kn 左右,在这样的低速下,舵效差,并有可能处于尾升降舵的逆速区,通常采用同时操首尾升降舵的方法来提高对深度控制的效果,根据文献资料其操纵效果不够理想。因此借签深潜器采用垂向推进器的方法,运用垂向推进器来加强垂向机动能力,并采用垂直面舵桨联合操控的方法[9],来提高潜艇垂直面上的操控效果。
2.2 仿真模型的建立
根据潜艇垂直面低速运动方程和建模思路,应用仿真软件Simulink 建立潜艇低速运动与控制仿真模型,采用报告AD -A 203925 中给出的1 艘大型潜艇,来模拟发射潜射导弹的潜艇,模拟工况取常用的3 kn 航速,潜航深度30 m,潜艇航速及首尾升降舵均采用工程上常用的PID 方法[8]来控制。
在潜艇中部两侧对称布置2 部导管螺旋桨作为垂向推进器,导管直径0.5 m,最大转速1 600 rpm,其安装纵向位置为潜艇重心处,推力轴线方向与潜艇坐标Z 向平行。导管桨采用潜艇辅助推进器的可收放结构,正常速度巡航时可收回潜艇内部,减少阻力,通常潜艇中部直径较大,可容纳较大直径的导管桨,以便产生较大推力。
3 结果分析
未采用垂向推进器时,潜艇采用同时操首尾升降舵的方法来进行潜艇的操控,主要由围壳舵或首升降舵来控制潜艇的深度,尾升降舵能产生较大的纵倾力矩,控制潜艇的纵倾角度,经过10 s 时间的平稳运动后,发射了一枚潜射导弹,采用上述操控方法后其纵倾角、深度和首升降舵角度如图2 ~图4 所示,潜艇运动姿态控制效果良好。与发射外力相比,操纵措施所产生的作用力较小,状态回复过程较缓慢,相对于发射反力不到1 s 的作用时间,潜艇需要约200 s 时间才能回复到比较平稳的运动状态,其实质是以较小的力通过较长时间的作用,来逐步抵消巨大发射反力的短时作用造成的运动状态的变化,在此过程中,潜艇深度和角度的变化是无法避免的。
虽然回复过程相对导弹发射过程比较缓慢,但操控措施效果较好,整个过程控制在一个较短的时间内,在50 s 内潜艇能回复到一个较好的深度,基本能够满足潜艇短时间内再次发射导弹的需要。模拟数据和文献[10]所发表结果符合情况较好,表明了本文方法的有效性。
为进一步加快回复时间,可采用垂向推进器来增加垂向机动力,同时潜艇仍然采用操首尾升降舵的方法来进行潜艇的操控,由围壳舵和垂向推进器共同提供垂直面的机动力,相同工况下潜艇的纵倾角、深度、首升降舵角度和垂向推进器推力变化如图5 ~图8 所示。
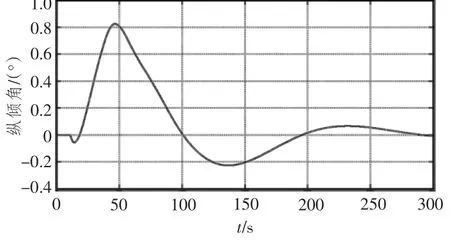
图2 潜艇纵倾角曲线Fig.2 The trim angle curve of submarine
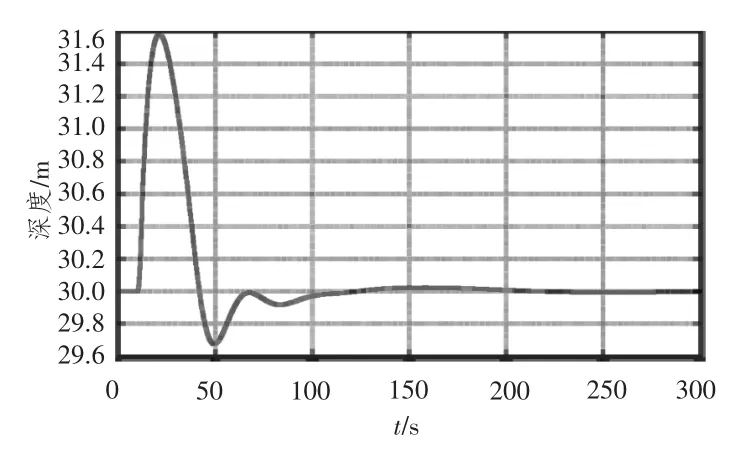
图3 潜艇深度变化Fig.3 The depth curve of submarine
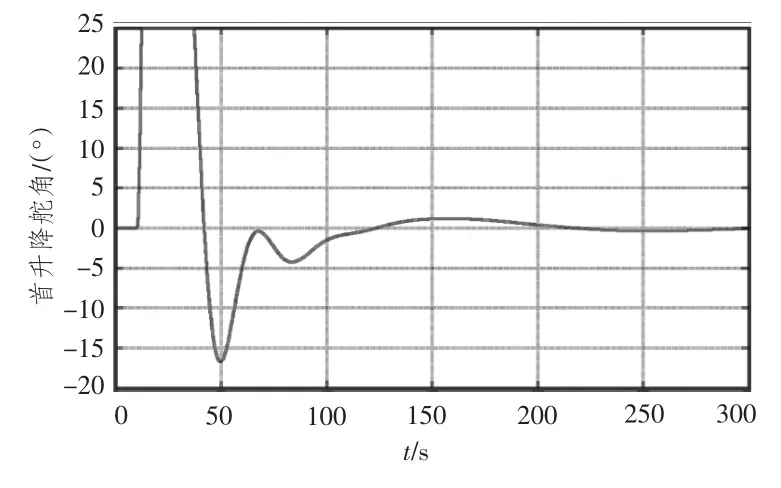
图4 潜艇首升降舵角度Fig.4 The front elevator angle curve of submarine
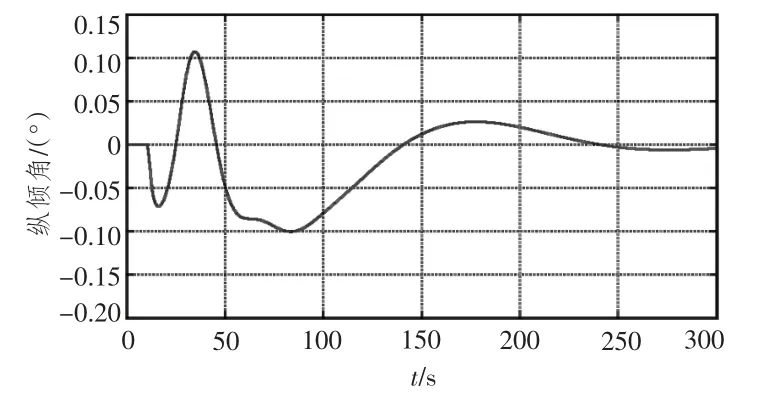
图5 潜艇纵倾角曲线Fig.5 The trim angle curve of submarine

图6 潜艇深度变化Fig.6 The depth curve of submarine
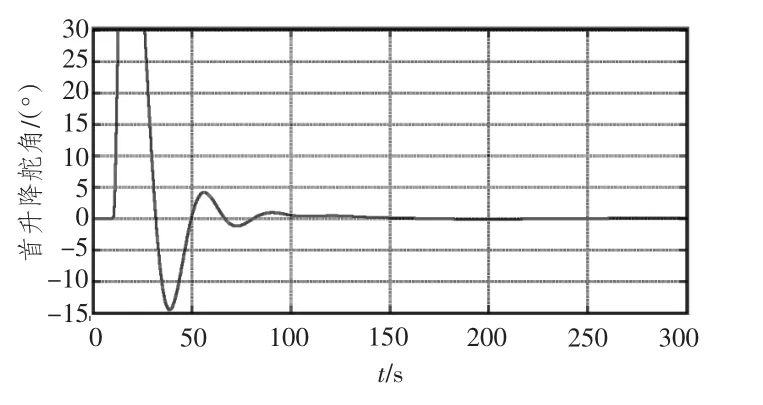
图7 潜艇首升降舵角度Fig.7 The front elevator angle curve of submarine
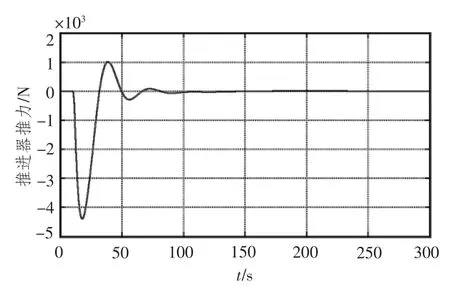
图8 垂向推进器推力曲线Fig.8 The thrust curve of vertical thruster
上述各参数曲线与未加入垂向推进器时的对比可以发现,在垂向推进器加入操控后,潜艇的纵倾和深度变化都有很大的减小,由于垂向推进器推力的作用,围壳舵的作用时间缩短,整个潜艇的姿态得到更好的改善,系统响应速度加快,较好的满足了潜艇姿态快速回复的要求。
4 结 语
根据上述计算分析表明,垂直发射潜射导弹引起潜艇姿态的较大改变,在较低航速下采用首尾平行上浮舵,利用首升降舵来控制深度、尾升降舵控制纵倾角的操纵方法效果较好,可以满足姿态恢复的要求,但是需要较多的恢复时间。
加入辅助的垂向推进器后,潜艇在垂直面的潜浮机动能力得到较大的改善,并且其垂向推进力不再受制于潜艇低速运动的影响,结合上述首尾平行上浮舵的操控方法,潜浮机动响应更加快速,可以较好的缩短潜艇姿态的回复时间,对潜艇该工况的实际操纵具有一定的指导意义。
[1]胡坤,高胜峰,张建华.潜艇水下破损潜坐海底操纵控制仿真研究[J].计算机仿真,2013,30(2):34 -92.HU Kun,GAO Sheng-feng,ZHANG Jian-hua.Simulation on manoeuvre and control of settling on bottom in case of submarine damaged underwater[J]. Computer Simulation,2013,30(2):34 -92.
[2]颜俐,许建,马运义.尾舵独立控制的潜艇垂直面运动仿真[J].舰船科学技术,2013,35(2):26 -31.YAN Li,XU Jian,MA Yun-yi. Simulation on stern-rudder independent control for submarine motion in vertical plane[J].Ship Science and Technology,2013,35(2):26 -31.
[3]王亚东,袁绪龙,覃东升.导弹水下发射筒口气泡特性研究[J].兵工学报,2011,32(8):991 -995.WANG Ya-dong,YUAN Xu-long,QIN Dong-sheng.Research on the outlet cavity features during the launch of submarine launched missile[J].Acta Armamentarii,2011,32(8):991 -995.
[4]程嘉欢,连琏,刘可峰.潜器在冲击载荷下的运动和控制研究[J].海洋工程,2014,32(1):77 -83.CHENG Jia-huan,LIAN Lian,LIU Ke-feng. Research on motion response and control of underwater vehicle under impact load[J]. The Ocean Engineering,2014,32(1):77-83.
[5]倪火才.潜载导弹水下垂直发射时的“水锤”压力研究[J].舰船科学技术,2000,22(5):46 -49.NI Huo-cai. Research on the “Water hammer”pressure during the launch of vertically launched missile[J]. Ship Science and Technology,2000,22(5):46 -49.
[6]刘可峰,姚宝恒,连琏.深潜器等厚导管螺旋桨敞水性能计算分析[J].船舶工程,2014,36(1):37 -40.LIU Ke-feng,YAO Bao-heng,LIAN Lian. Calculation and analysis of open water performance for submersibles identical thickness ducted propellers[J].Ship Engineering,2014,36(1):37 -40.
[7]施生达.潜艇操纵性[M].北京:国防工业出版社,1995.SHI Sheng-da. Maneuver of Submarine[M]. Beijing:National Defence of Industry Press,1995.
[8]王述彦,师宇,冯忠绪.基于模糊PID 控制器的控制方法研究[J].机械科学与技术,2011,30(1):166 -172.WANG Shu-yan,SHI Yu,FENG Zhong-xu. A method for controlling a loading system based on a fuzzy PID controller[J]. Mechanical Science and Technology for Aerospace Engineering,2011,30(1):166 -172.
[9]张磊,庞永杰,李晔,等.舵桨联合操纵的自主式水下机器人运动控制[J].北京工业大学学报,2011,37(1):40-46.ZHANG Lei,PANG Yong-jie,LI Ye,et al.Motion control of AUV based on rudders and thrusters[J].Journal of Beijing University of Technology,2011,37(1):40 -46.
[10]李文龙,徐亦凡,李博.水下连续发射导弹时潜器深度与姿态控制仿真[C]//中国控制与决策学术年会,2004.LI Wen-long,XU Yi-fan,LI Bo. Simulation of controlling the gesture and depth of SSBN while projecting in series[C]//Proceedings of 2004 Chinese Control and Decision Conference,2004.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
海军航空大学学报(2022年2期)2022-05-15
西安航空学院学报(2021年3期)2021-10-14
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2020年9期)2020-10-31
当代陕西(2018年12期)2018-08-04
舰船科学技术(2018年6期)2018-07-02
科学与财富(2018年13期)2018-06-13
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
