船舶动力定位智能PID控制器设计与仿真研究
2015-12-20 03:51郭丹丹
舰船科学技术 2015年9期
李 众,郭丹丹
(1.常州信息职业技术学院 电子与电气工程系,江苏 常州213164;2.江苏科技大学 电子信息学院,江苏 镇江212003)
0 引 言
船舶动力定位是指在不借助锚泊系统的情况下,船舶利用自身推力系统产生反力和反力矩以抵抗风、浪和流作用于其上的环境外力和力矩,使船舶保持一定的位置和角度或按照预定轨迹运动[1]。与传统锚泊系统相比,其具有不受水深影响、操作方便、机动性强、定位精度高等优点。
PID 控制器作为最先被用在船舶动力定位系统上的控制器,仍然适宜于大多数情况下的船舶动力定位系统控制。但作为一种基础级的控制方式,PID 控制的适用性有一定范围,研究表明对于被控对象难以控制的复杂系统以及控制精度要求特别高的系统只采用PID 控制效果并不十分理想,而如果基础控制采用优化的PID 控制,并引入函数功能模块在线整定控制器的参数,则能很好地满足控制系统要求。
云模型是一种新兴的智能控制算法,其基本思想是利用计算机来实现人的控制经验,所采用的云模型定性推理方法不要求给出被控对象的精确数学模型,同时可以保留被控对象及其环境中各种未知的不确定性因素。在优化理论方面,粒子群优化算法作为一种新的并行优化算法,目前已广泛应用于科学和工程领域。针对标准粒子群优化算法容易出现早熟收敛的问题,引入基于混沌遍历性和混沌搜索机制进行改进的混沌粒子群优化算法。为保证系统的优良控制品质,本文首先采用混沌粒子群算法离线优化PID 控制器参数。为进一步提高控制器对内部参数和外部干扰变化的适应性,将二维云模型控制与PID 控制相结合,设计了自适应云模型PID控制器。仿真结果表明所设计船舶动力定位控制器具有良好的控制效果。
1 船舶动力定位系统非线性模型
对于动力定位船舶,由于纵摇、横摇和垂荡运动对船舶水平面内的定位影响较小,通常只需考虑纵荡、横荡和首摇3 个自由度的水平面运动[2]。建立如图1 所示的船舶运动参考坐标系,OEXEYE为大地坐标系,OXY 为随船坐标系,随船坐标系的原点在船舶重心处。定义OEXEYE下的船舶位置和首摇角η=(x,y,ψ),OXY 下的速度向量υ=(u,v,r)。
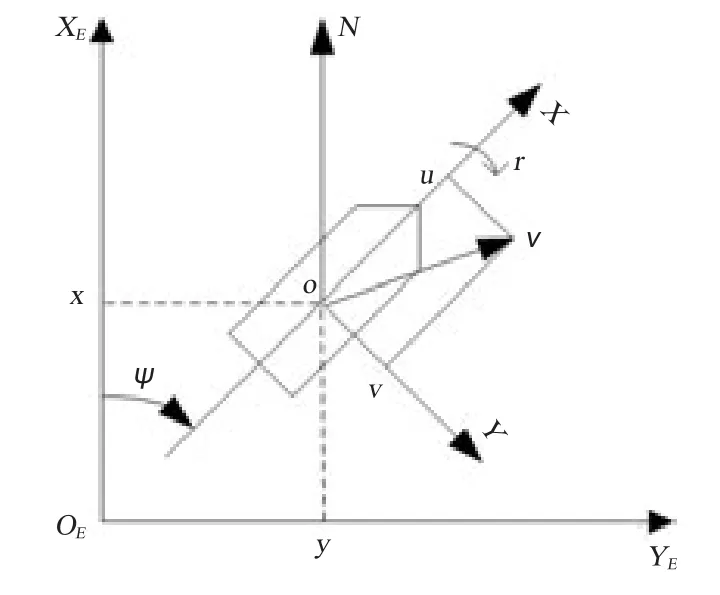
图1 船舶水面运动坐标系Fig.1 Reference frames of ship surface movement
由于船舶动力定位属于低速船舶运动控制,当只执行位置保持功能时,速度值很小,因而科氏力-向心力和非线性阻尼可以忽略[3]。船舶动力定位低频数学模型为:
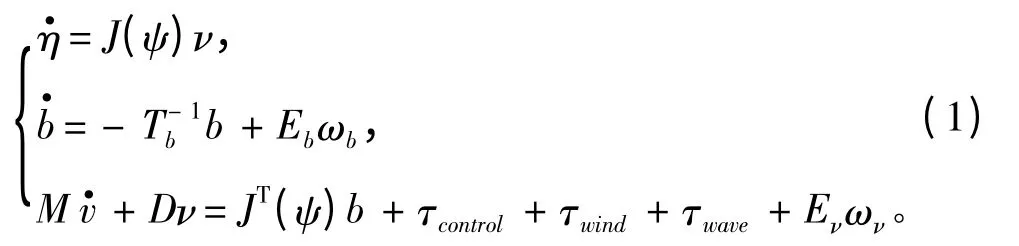
式中:b 为缓慢变化的偏差项,包括低频流干扰、二阶波浪力干扰和其他未建模干扰力;Tb为偏差b 的时间常数;Eb为环境扰动力的幅值;ωb为零均值高斯白噪声向量,表示b 的模型不确定性;τcontrol,τwind,τwave分别为控制作用、风和一阶波浪的干扰作用;Eν为系统噪声的幅值;ων为零均值高斯白噪声向量,代表其他未建模干扰作用。
此外,一阶波浪作用力τwave还可以波浪诱导船舶运动的形式加入到船舶低频运动模型中。一阶波浪诱导船舶运动的状态方程可表示为:

式中:ξw=[xw,yw,ψw,uw,vw,rw]T为纵荡、横荡和首揺方向上的一阶波浪诱导位移和速度向量;ηw=[xw,yw,ψw]T为波浪诱导船舶位移向量;ωw为零均值高斯白噪声向量。
将式(1)和式(2)结合,则可得到动力定位船舶运动的非线性数学模型:
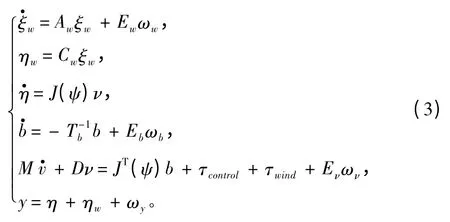
式中y=[x,y,ψ]T为船舶位置和艏揺角的测量值;ωy为零均值高斯白噪声,表示测量噪声。
2 利用CPSO 整定PID 控制参数
2.1 标准粒子群优化算法(PSO)
PSO 算法是Kennedy 和Eberhart 受鸟群觅食行为启发于1995 年提出的一种全局优化算法,通过种群中粒子间合作与竞争产生的群体智能指导优化搜索[4]。其数学描述如下:假设N 个粒子在D 维搜索空间中以一定的速度飞行,粒子i 的当前位置为xi=(xi1,xi2,…,xiD)、速度为vi=(vi1,vi2,…,viD),个体最优位置为pbesti= (pbesti1,pbesti2,…,pbestiD)。设f(x)为最小化的目标函数,则个体当前最优位置和全局最优位置gbest(t)可分别由式(4)和式(5)确定。
粒子速度与位置的更新方程为:

式中:ω 为惯性权重;ωmax和ωmin分别为最大、最小惯性权重;t 为当前迭代次数;T 为最大迭代次数;c1和c2为学习因子;r1和r2为[0,1]内随机数。
2.2 混沌粒子群优化算法(CPSO)
混沌是非线性系统中较为普遍的现象,它是由确定性方程得到的具有随机性的运动状态,混沌运动的遍历性使得混沌变量能在一定范围内按自身规律不重复地历经所有状态[5]。CPSO 是指在粒子群算法中加入混沌变量,针对PSO 的不足之处进行改进:一是PSO 初始种群通常为随机选取,当解空间较大时一般不能保证初始粒子均匀分布于整个解空间,导致PSO 全局搜索能力减弱,加大了算法陷入局部最优的可能。针对PSO 这一缺点,CPSO 首先根据混沌确定性方程产生一组混沌向量,再依据向量间欧式距离从中提取分布均匀的混沌向量映射到解空间作为粒子初始位置。二是“早熟”是PSO 面临的最大问题,当粒子在搜索过程中遇到局部最优值,易使所有粒子均飞入该局部极值点而导致算法停滞。混沌算法由于其遍历性特点很容易跳出局部最优解,当适应值连续数代不更新或更新不明显时,CPSO 将在以gbest(t)为中心、R 为半径的空间邻域内进行混沌迭代,并随机取代部分粒子以增加种群粒子的多样性。

式中:xmax和xmin分别为解空间的上下界;ρ 为混沌搜索的收缩因子。为减小混沌搜索范围,增加搜索精度,在CPSO 迭代过程中ρ 取1.0 ~0.3 线性递减。
式(10)描述的Logistic 映射是最典型的混沌系统,但图2 不同混沌映射的遍历性分析仿真研究表明:Logistic 方程产生的混沌变量轨道点分布不均匀,而式(11)描述的混沌映射F 具有更好的遍历性;选用多个初值分别进行混沌迭代产生多条混沌轨道,其混沌遍历性要优于单条混沌轨道。图中单轨道映射为单个初值迭代2000 次得到的混沌向量,多轨道映射为50 个不同初值迭代40 次得到的混沌向量。显然多轨道F 映射的遍历性最好,本文CPSO算法采用多轨道F 映射进行混沌迭代。


图2 不同混沌映射的遍历性分析图Fig.2 Ergodicity analysis of different chaos mapping
2.3 CPSO-PID 算法流程
ITAE 是时间乘以误差绝对值积分的性能指标,在评价系统动态性能方面以其较好的实用性和选择性得到了广泛应用。由于动力定位控制系统同时采用3 个智能PID 控制器,所以目标函数选择为:
其中ω1,ω2,ω3为加权系数。
适应度函数确定后便可以对参数{Kp1,Ki1,Kd1,Kp2,Ki2,Kd2,Kp3,Ki3,Kd3}进行寻优,在满足约束条件下目标函数值最小时所对应的参数即为最优控制器参数。算法具体步骤为:
步骤1 初始化。
1)初始化参数:设定种群规模N、最大迭代次数T、选择阈值δ、迭代概率P 及PSO 算法的相关初始参数。
2)初始化粒子群:①用映射F 对多个不同z0=(z01,…,z0D)(z0i∈(0,1),D 为解空间的维数)同时迭代得到一组混沌向量zi= (zi1,…,ziD);②根据式(13)计算任意2 个混沌向量间的欧式距离△,当△<δ 时除去其中一个;③按式(14)将zi扩展到解变量的取值区间得到位置向量xi=(xi1,…,xiD),计算适应值并提取最好的N 个作为粒子初始位置;④随机初始化N 个粒子的速度向量。
3)pbesti初值为粒子当前位置,gbest 初始值为初始粒子的全局最优位置。
步骤2 根据式(6)计算ω,按式(7)更新当前粒子的速度,并执行式(15)。

步骤3 根据式(8)更新当前粒子的位置,并按式(16)对超出边界的粒子进行变异操作。

步骤4 将xi(i=1 -N)依次作为动力定位控制器参数进行仿真,并按式(12)计算适应值。
步骤5 先按式(4)更新pbesti,再按式(5)更新gbest。
步骤6 判断算法是否停滞,若停滞则执行步骤7,否则转步骤8。
步骤7 按照式(11)生成N×P 个D 维混沌向量Yi=(Yi1,…,YiD)(Yij∈[-1,1],j = 1 - D),执行式(17)将混沌向量变换到式(9)设定的解空间范围内,随机取代原种群中的N × P 个粒子。

步骤8 检查终止条件,若t <T 则返回步骤2;否则终止迭代并输出gbest。
3 自适应云模型PID 控制器设计
针对上述动力定位系统非线性模型,结合智能PID 控制器的特点,设计了如图3 所示的船舶动力定位控制器。为简单起见,控制纵荡、横荡和首揺3 个方向运动的智能PID 控制器分别记为C1,C2和C3。每个智能PID 控制器由粒子群寻优模块和自适应云模型PID 控制器构成,自适应云模型PID 控制器利用二维云模型控制在线修正PID 控制参数,二维云模型推理模块以误差e 和误差变化率ec为输入可以满足不同时刻PID 参数整定的要求。

图3 动力定位控制系统原理框图Fig.3 Architecture of dynamic positioning control system
3.1 云模型概念
云模型是一种实现定性概念与定量数据相互转换的不确定性转换模型,它用均值(Ex)、熵(En)和超熵(He)等3 个数字特征将概念的随机性与模糊性融为一体[6]。设U 是一个用精确数值表示的定量论域,C 为U 上的定性概念,若定量值x∈U,且x 是定性概念C 的一次随机实现,x 对C 的确定度μ(x)∈[0,1]是有稳定倾向的随机数,则x 在U 上的分布称为云模型[7]。

3.2 二维云模型推理映射
二维云模型控制器实现的输入输出控制本质上是一种多输入单输出映射关系,该映射由一组云模型推理规则IF X1and X2,THEN Y 来完成,其中X1和X2是规则前件,表示为(Ex1,Enx1,Hex1)和(Ex2,Enx2,Hex2);Y 为 规 则 后 件,表 示 为(Ey,Eny,Hey)。如 果 已 知 云 模 型(Ex1,Enx1,Hex1)和(Ex2,Enx2,Hex2),并有特定输入x1= x10和x2=x20,则称为二维X 条件云模型,记为CGX1,X2;如果已知云模型(Ey,Eny,Hey),并有特定输入μ(x)=μ(x0),则称为Y 条件云模型,记为CGY。
二维X 条件云模型为:

式中:R2(A1,A2,A3,A4)为服从正态分布的二维随机函数,A1和A2为期望值,A3和A4为标准差。
Y 条件云模型为:


式中:R1(B1,B2)为服从正态分布的随机数,B1为期望值,B2为标准差。
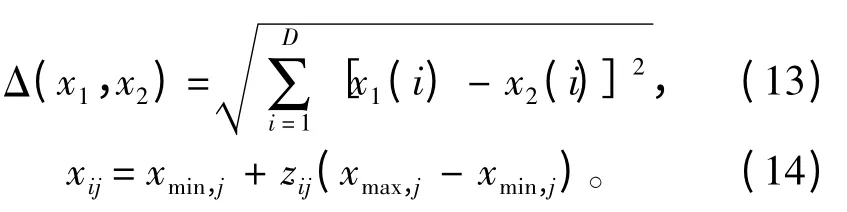
二维云模型映射器的结构如图4 所示,其由二维云模型多规则推理和加权平均处理2 部分组成。设规则库中的规则数为L,二维输入x1和x2刺激不同规则的前件部分CGX11,X21~CGX1L,X2L,产生不同的μ1j~μLj值,再经规则后件云发生器CGY1~CGYL处理,产生大量的云滴drop(y1jk,μ1j) ~drop(yLjk,μLj)。这些云滴经过加权平均处理后,最终得到与输入x1和x2相对应的定量输出值y,即(x1,x2)到y 的映射。
图4 二维云模型映射器Fig.4 2 -D cloud model mapping processor
在本文二维云模型控制器设计中,输入均为(e,ec),输出分别为PID 控制参数的变化ΔKp,ΔKi和ΔKd。二维云模型推理结构为Rij:IF X1i和X2j,THEN Yk;i = 1 - I,j = 1 - J,k = 1 - K。令I =J = K = 7,输入云模型和输出云模型定义如下式:
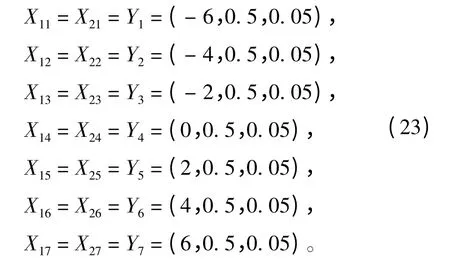
3.3 云模型控制规则库
用矩阵形式表示二维云模型推理规则,有R={Rij},其中Rij为二维控制规则IF X1i和X2j,THEN Yk,k=Rij。参数ΔKp,ΔKi和ΔKd自整定的规则库均有49 条控制规则,具体见式(24)。
经过二维云模型不确定规则推理,输出ΔKp,ΔKi和ΔKd,并按式(25)在线整定PID 控制参数。

式中:Kp0,Ki0和Kd0为利用CPSO 寻优得到的PID控制参数初始值;ΔKp,ΔKi,ΔKd为二维云模型推理模块根据海况变化和被控对象状态自适应调整的结果。
4 仿真研究
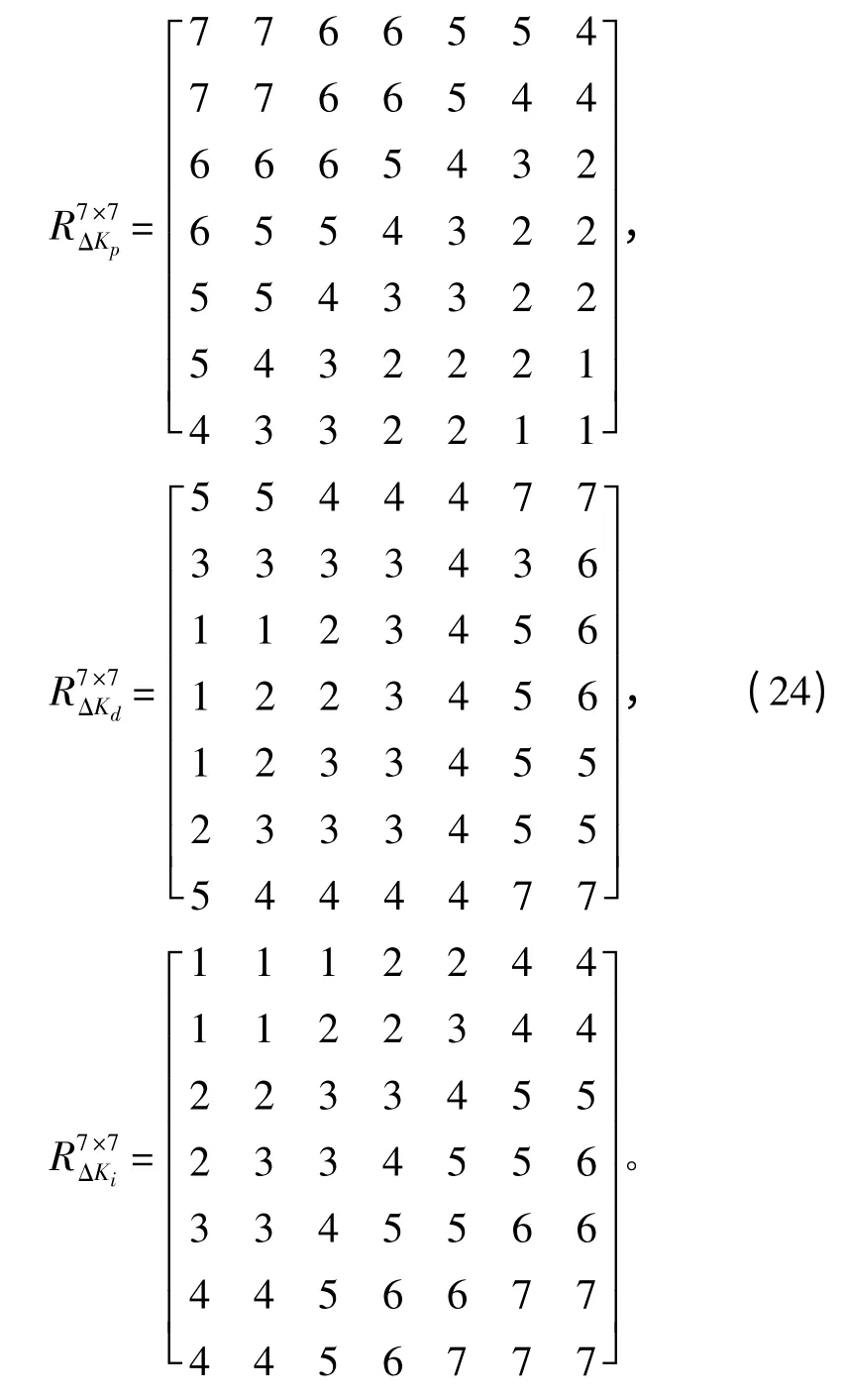
现以1 艘供给船为受控对象在Matlab7.0 环境下进行仿真研究,该供给船的质量m=4.591 ×106kg,船长L=76.2 m,船宽B=18.8 m,无量纲惯性矩阵和阻尼矩阵[8]分别为:

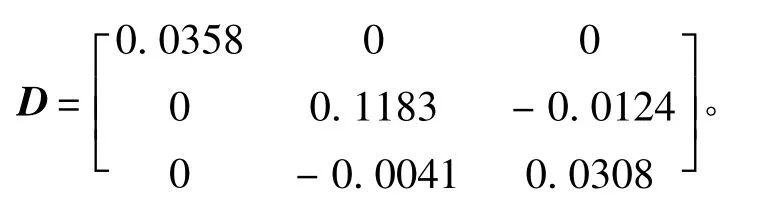
针对上述对象,利用CPSO-PID 设计方法对控制器的参数进行优化。取粒子数N = 40,最大迭代次数T = 50,迭代概率P = 0.2,ωmin= 0.4,ωmax=0.9。控制参数优化结果为:{Kp1= 0.236 9,Ki1=0.000 3,Kd1=1.495 4,Kp2=0.285 8,Ki2=0.000 6,Kd2=1.217 2,Kp3= 0.396 6,Ki3= 0.000 5,Kd3=1.292 6},寻优过程曲线如图5 所示。设置二维云模型控制器的量化因子Ke=0.1,Kec=0.5;驱动因子K1= 0.01,K2=0.000 1,K3=0.02。
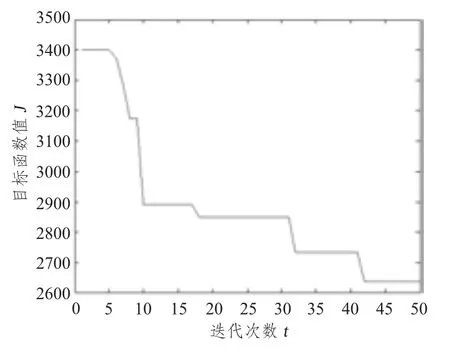
图5 CPSO 优化PID 的收敛曲线Fig.5 The CPSO-PID convergence curve
为验证所设计的船舶动力定位智能PID 控制器性能,将其在以下2 种海况条件下控制的船舶3 自由度运动效果与传统PID 控制器的控制效果进行对比。在理想海况和4 级海况下:有义波高Hs= 2 m,平均风速10 m/s ,风向角在0° ~360°内随机变化。假设船舶的初始位置为(0 m,0 m,0°),定位点为(50 m,40 m,10°),取仿真时间为500 s,仿真结果如图6 和图7 所示。

图6 理想海况下控制系统仿真Fig.6 Simulation of DP control system in ideal sea conditions

图7 四级海况下控制系统仿真Fig.7 Simulation of DP control system in the 4th-level sea conditions
理想海况下,传统PID 控制在纵荡、横荡和首揺3 个方向上响应的超调量和调节时间分别为5.52%,5.48%,9.10%和189 s,162 s,135 s;智能PID 控制在3 个方向上的响应曲线平滑无超调,调节时间为28 s,13 s,20 s。4 级海况下,传统PID 对外界干扰较敏感,响应曲线在经过很大的超调和振荡后收敛于目标值,而智能PID 表现出稳定的收敛性,调节时间也从200 s,134 s,83 s 缩短为102 s,109 s,50 s。可见智能PID 控制器在调节时间、超调量、稳态精度上都有很大的提高,对外部干扰和内部参数变化具有较强的鲁棒性,不仅能够满足控制要求,其控制效果也明显优于传统PID。
5 结 语
近年来我国船舶工业和海洋事业处在高速发展时期,船舶动力定位仍是一大研究热点。本文在对PSO 算法和云模型控制理论深入研究的基础上,提出了基于CPSO 算法和二维云模型推理的PID 控制器优化设计方法。所采用的云模型控制将人自然语言表达的定性控制经验转换到语言控制规则中,能够直接实现从定量到定性、再从定性到定量的控制过程,控制策略简明,通用性强。CPSO 算法除了具有简单易行、计算效率高、收敛速度快等优点外,最重要的是其遍历性特点能够带领种群跳出局部极值,全局收敛能力强。所设计的智能PID 控制器较大程度地提高了系统的动静态性能,具有一定的实用借鉴价值。
[1]赵大威,边信黔,丁福光.非线性船舶动力定位控制器设计[J].哈尔滨工程大学学报,2011,32(1):57 -61.ZHAO Da-wei,BIAN Xin-qian,DING Fu-guang.Design of a nonlinear controller for dynamic ship positioning[J].Journal of Harbin Engineering University,2011,32(1):57-61.
[2]WANG Li-yun,XIAO Jian-mei,WANG Xi-huai. Ship dynamic positioning systems based on fuzzy predictive control[J]. Telkomnika-Indonesian Journal of Electrical Engineering,2013,11(11):6769 -6779.
[3]谢业海.海况变化时的船舶定点定位切换自适应控制研究[D].哈尔滨:哈尔滨工程大学,2013.XIE Ye-hai. Switching adaptive control on station keeping operations of ship under varying sea states[D]. Harbin:Harbin Engineering University,2013.
[4]李立礼,王强,王晓霄.改进粒子群优化算法在PID 参数整定中的研究[J]. 计算机工程与应用,2009,45(25):240 -241,245.LI Li-li,WANG Qiang,WANG Xiao-xiao. Research on tuning PID parameters based on improved particle swarm optimization algorithms[J]. Computer Engineering and Applications,2009,45(25):240 -241,245.
[5]陈如清,俞金寿.混沌粒子群混合优化算法的研究与应用[J].系统仿真学报,2008,20(3):685 -688.CHEN Ru-qing,Yu Jin-shou. Study and application of chaos-particle swarm optimization-based hybrid optimization algorithm[J]. Journal of System Simulation,2008,20(3):685 -688.
[6]李众,杨一栋.一种新的基于二维云模型不确定性推理的智能控制器[J]. 控制与决策,2005,20(8):866 -872,877.LI Zhong,YANG Yi-dong. A novel intelligent controller based on uncertainty reasoning of two-dimension cloud model[J]. Control and Decision,2005,20 (8):866 -872,877.
[7]李德毅,杜鹢.不确定性人工智能[M]. 北京:国防工业出版社,2005:143 -145.LI De-yi,DU Yi.Artificial intelligence with uncertainty[M],Beijing:National Defense Industry Press,2005:143-145.
[8]王丽娜.船舶动力定位系统控制器的设计与仿真[D].大连:大连海事大学,2012.WANG Li-na. Controller design and simulation of dynamic positioning system [D]. Dalian: Dalian Maritime University,2012.
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
昆明医科大学学报(2022年1期)2022-02-28
煤气与热力(2021年12期)2022-01-19
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年13期)2020-01-14
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
飞碟探索(2015年8期)2015-10-15