
基于DSP的小型船舶直流无刷电机控制系统的设计
2015-12-20 03:50杨立宏
舰船科学技术 2015年6期
杨立宏
(中山火炬职业技术学院,广东 中山528436)
0 引 言
由于永磁技术的飞速发展,DSP 微处理器技术有很大突破,功率器件的开关速度和容量越来越好,功率器件MOSFET 以及IGBT 使得无刷直流电机(BLDCM)的驱动功率越来越大、转速越来越大、输出转矩不断增大、整体性能越来越优越。此外,随着电子元器件的集成度越来越高和数字控制技术的不断发展,全世界的科研人员对BLDCM 开展了大量研究,运用复杂的控制算法实现BLDCM 的高性能控制,使其在电力推进船舶中实现价值[1]。
1 系统设计
直流无刷电机的系统组成如图1 所示,主要包括电机本体、转子位置传感器、逆变器、控制器等,结构比较简单。由于本文所涉及的是大功率的直流无刷电机,如果直流电源不是来自船舶电网,而是由串并联组成的蓄电池网络供电,对每个蓄电池单体选型要求就要比正常情况下要严格的多。
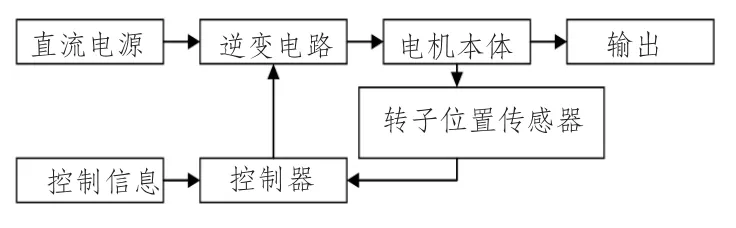
图1 系统组成Fig.1 Components of system
BLDCM 的本体一般都由定子、转子、位置传感器构成。其中定子绕组一般为多组,能够输出多相电压,位置传感器的功能是实时采样转子的位置,并把位置信息反馈回去,形成偏差信号,从而调制出PWM 信号,从而驱动功率开关器件、提供换相信号,也就是把转子的位置信息变换成控制器可以处理的电信号后,再控制定子绕组上的输出电压进行换相。位置传感器有许多种,每一种传感器都有其各自的特性,常见的一般包括电磁传感器、光电传感器、旋转变压器等。逆变器的主要任务是把位置传感器的反馈回来的转子位置信号进行处理后直接驱动功率管,从而控制功率管的饱和导通和截止断开,从而实现把直流电能逆变成交流电能,使得电机可以一直进行运转。
本文所设计的逆变器采用三相逆变器,功率管开关方式为两相导通的星型,总共含有6 个状态。BLDCM 的系统原理如图2 所示,三相全控桥分别为A 相、B 相、C 相,对应的电机本体上也有3 对定子绕组,三相定子绕组的连接方式为Y 形,其中绕组的一端都分别连接到逆变器的3 条桥壁的中点。三相逆变器总共包括6 个功率管,组成3 条桥壁,每条桥壁包括上桥壁和下桥臂2 个功率管。位置传感器为光电传感器,结构比较清晰、成本低廉、占空间体积小、便于安装等优势,光电传感器输出3 路正交信号A,B,Z,通过对这3 路信号进行分析可以判断转子的速度和位置。以DSP 为核心的控制器对反馈的位置信号和速度信号进行分析,从而实现对6 个功率管的开关控制,让直流无刷电机进行换相,最终输出三相的交流方波来驱动电机工作[2]。

图2 BLDCM 的系统原理示意图Fig.2 System schematic diagram of BLDCM
2 硬件系统设计
如图3 所示,硬件系统组成主要由以DSP 为核心的主控模块、外围接口模块、通信模块、逆变模块等构成,此外还包括CAN 总线接口、串口、仿真接口等。以往为控制器主要使用模拟信号院队对控制系统进行研究,驱动控制模块都使用模拟电子元器件。随着科技的不断发展,数字信号处理器(简称DSP)的性能逐步提升,完全取代了以前的模拟信号分析装置的位置。DSP 更能符合应用的需求,运用非常灵活,能够进行准确控制、具有很好的抗干扰能力、处理数据的能力强和效率高以及工作非常可靠,由于BLDCM 的驱动器系统比较复杂,会使用到比较复杂的算法,而DSP 恰好满足要求。只需要进行简单的编程,采用对应的控制算法,就能对电机硬性完美的控制。
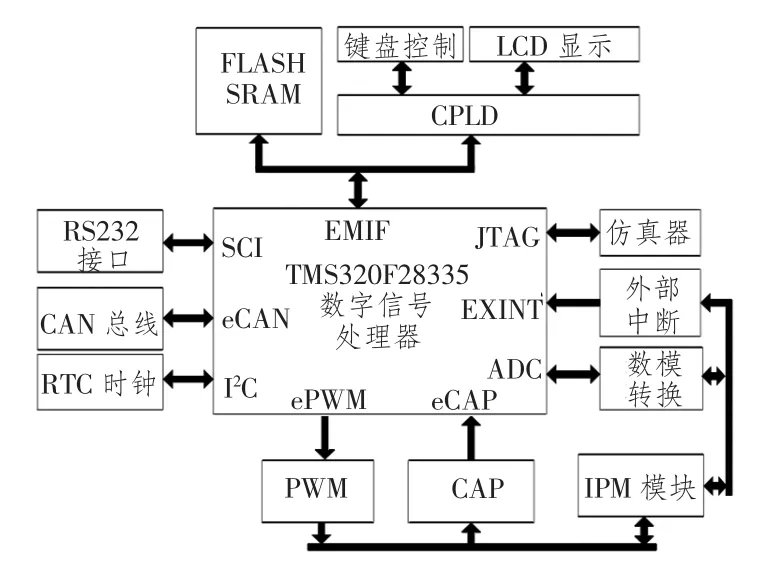
图3 硬件系统组成Fig.3 Components of hardware system
目前,DSP 的品种繁多,其选型至关重要。DSP 经过综合考虑,本文最终采用TI 公司的TMS320C2000 系列的芯片,因为船舶的工作环境比较恶例,工况比较多,控制系统更加复杂,此款芯片可以把所有复杂的数字控制算法都做到一个体积很小的芯片里,其很强的数据分析能力和控制效果使得其在船舶推进电机中凸显出来。如DSP 芯片28335 除了具备以上优点之外,它的内核有浮点处理模块,使得复杂的控制算法能够轻松实现。通过结合船舶电力推进电机的应用背景,本文最终选择28335 作为直流无刷电机的主控制器。
此款DSP 的脉冲宽度调制模块包括6 个子功能模块,并且一个通道能够输出2 路PWM 调制信号。驱动器中逆变全桥包括6 个功率管,任何一个桥臂上的上桥臂功率管和下桥臂功率管的驱动信号都互补,即上桥臂的开关状态为1,对应的下桥臂的开关状态必须为0,必须杜绝短路事故的发生。DSP 引脚的电流输出能力很弱,一般情况下不能够直接驱动负载,因此输出的脉冲信号都要通过驱动电路把其进行放大,才能驱动负载,本文最终选择的驱动芯片为通用的功率管驱动芯片74HC245。
IPM 是目前使用比较方便的一种集成功率模块,它把电机驱动系统和主控系统集成在一起,能够给电机进行智能供电,具有使用方便、大大缩短电机控制器产品的研发周期的优点,把电机功率模块、控制模块以及各种保护模块都集成在一起,不但结构比较简单,而且成本比较低廉,此外电机控制器的整体性能得到了很强的提升,综合考虑,逆变电路采用集成芯片,其主要IR2264 和功率MOS 管IRF3206 组成。
二极管分别与电容构成三路斩波电路进行升压,二极管的作用是避免电流反过来流,因为电机既是电动机也是发电机,电容的作用是把电能进行存储,在输出的PWM 信号的频率比较大的情况下,升压电路的最终输出电压为输入电路两端的电压和电容两端的电压之和,从而把输入电压进行提升。升压电路的作用是把输入电压进行放大后传递给驱动芯片,使其能够非常稳定地控制功率开关器件工作。六路PWM 信号分别输出到三相逆变电路中的功率MOS 管的栅极。其中每相都由2 个功率管进行控制,功率管输出信号与输入信号是反向的,从以上分析可以得出DSP 引脚输出的六路PWM 信号需要通过许多电路的分析和处理后,最终才能驱动功率管[3]。
DSP 包含6 个加强的捕捉模块,每个捕捉模块都包括一个以时间为基准的计数器,4 个以时间为标签的捕捉寄存器,4 个状态排序器,他们都能够单独实现各种信号的捕捉功能。直流无刷电机控制系统首先要对3 个定子绕组上的定子电流和位置传感器的信号进行采样反馈,然后交给DSP 去处理。DSP 可以提供2 个八通道的A/D 转换模块。此外,直流无刷电机控制系统要对定子电流、直流总线电压以及总线电流进行采样,检测三相定子电流用来分析输出的转矩,并对其进行控制,直流总线电压采样电路和直流总线电流采样电路的作用是对系统进行保护。一旦发生总线电流过大、总线电压过高以及电压不够的情况,就立马将电源进行断开操作。
本文亦使用线性的ABS154 电流传感器来进行电流检测。ABS154 为一种线性度很高的一款电流传感器,它的内部包括准确的低偏移的霍尔传感器模块,可以把和采样的交直流按照一定的比例进行输出,有点包括电磁噪声非常低、响应速度非常迅速、转换精度高、能够隔离的电压很大、便于运用等。如果需要和上位机进行通信,需要把DSP 上的SCI接口进行转换,然后才能和上位机上的RS232 接口进行通信。多机通信通过CAN 总线接口,用于多个推进电机之间的通信,比如同步、协调等[4]。RTC时钟模块,提供整个系统的工作时序,类似于一个时间,每个单位时间内改执行什么操作,从而使得整个系统按部就班进行运作。LCD 显示器是把需要监控的参数进行显示,便于操作人员进行操作,是一种可视化的人机界面。键盘控制模块是一种输入设备,操作人员可以把信息通过此输入进去。FLASH 静态存储器是对DSP 内部存储器容量的一种扩充,使得数据的存储有更多的空间。外部中断模块是对外部信号进行实时中断,它跟普通输入和输出引脚的主要区别在于其响应速度非常快,甚至可以忽略掉响应时间。其中,键盘控制模块和液晶显示模块都是CPLD 实现与DSP 通讯的,FLASH 静态存储器是直接通过DSP 的EMIF 与DSP 实现通信的,CAN 总线接口是通过eCAN 来实现通信的。RTC 时钟模块是通过I2C 总线接口来实现通信的。DSP 内置了PWM 模块,能够直接输出PWM 信号,PWM信号首先利用光耦进行强弱电隔离,然后传递给功率管的驱动芯片,最终驱动功率管进行工作。值得注意的一点是,IPM 模块必须与电机的负载进行匹配,因为船舶在海上航行时,工况特别多,电机的负载会随着天气的变化而变化。数字信号控制器作为直流无刷电机控制系统的控制核心,集中管理协调各个模块工作,它能够在很短的时间内快速地处理大量的信息,功能非常强大,能够满足电机控制的要求。
3 软件系统设计
直流无刷电机控制系统不仅要负责电机的驱动工作,还要完成所有辅助工作,比如和上位机之间通信,电机工作过程中所有参数的监控等。此外,还包括控制器在突发状况下能够主动做出判断并进行正确的处理,避免整个直流无刷电机的控制系统不能正常工作。
考虑到船舶上推进电动机的控制系统对程序的以上所述的要求,本文提出了一种建立以实时操作系统为基础的多个任务调节系统,也就是把实时的操作系统转接到控制系统里面,并把其建设成软件的编写流程,把电机的控制系统里所有需要采样的信号进行检测,然后采用算法进行计算,并通过DSP 输出的脉冲信号对功率管进行控制。
为了满足船舶推进电机的要求,把直流无刷电机的控制系统植入现代流行的控制算法,具体过程如下所述:把模糊PID 算法依据设定的转速大小和传感器反馈回来的实际转速的偏差和变化速率进行实时控制,模糊PID 算法在DSP 中实现,然后控制引脚输出PWM 控制信号,并通过采样的每相定子电流信号和定子的反电动势信号来对直流无刷电机的输出转矩进行控制,实现过程需要进行查表,然后通过数字信号处理器DSP 去控制6个功率MOS 管进行开关操作。通过以上对直流无刷电机的控制系统进行详细的分析,软件系统包括:
1)启动操作。这由操作系统决定。
2)与上位进行通信。把直流无刷电机的实际状况的信号反馈给DSP,DSP 再把信息传达给上位机,最后上位机根据此信息再下达响应的控制命令,包括改变船舶的行驶方向、航行速度、船舶的启动与停止等。
3)键盘的输入操作和液晶显示操作。不能和上位机进行通信时,对直流无刷推进电动机的运行参数进行设置并显示。
4)模糊PID 算法的操作。通过速度偏差和速度的变化率进行模糊PID 控制,输出脉冲宽度调制信号。
4 实验结果与分析
以数字信号处理器DSP 为控制核心的控制板和以功率开关管MOS 管为驱动核心的驱动板共同构成的硬件实验装置如图4 所示。程序的编写平台是在德州仪器公司出品的CCS 软件开发平台,其不仅给出了配置功能,还提供了对所编写程序进行分析的工具,软件编写人员可以很方便地DSP 的程序进行开发、软件调试、在线调试等,大大缩短了开发周期。实验装置的目的是检测本文所涉及的直流无刷电机控制系统是否满足设计的要求[5]。
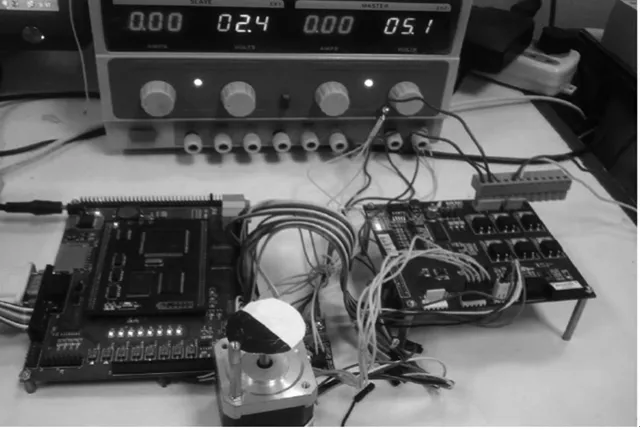
图4 硬件实验装置Fig.4 Hardware experimental device
在电流环和速度环的2 个闭合回路中都应用模糊PID 算法对速度偏差和转矩偏差进行调节,PID 算法是最经典的控制算法,需要对它的比例系数、积分系数以及微分系数进行严格的选取,需要通过大量的实验,但与模糊算法之后,可以在线对这3 个系数进行自动调节,最后确定比例系数为0. 4、积分系数为0. 12、微分系数为0. 19,直流无刷推进电机的输出转速和转矩曲线如图5 和图6 所示,其中图5 为负载发生变化情况下的直流无刷电机的转速和输出转矩的响应曲线,图6 为负载发生变化情况下的直流无刷电机的转速和输出转矩的响应曲线,可以看出,整个系统的静态性能和动态性能良好,响应时间短,稳态误差很小,一个参数变化时,另一个参数能够很快恢复正常。

图5 负载变化时,电机的响应曲线Fig.5 Response curve of the motor when load changes
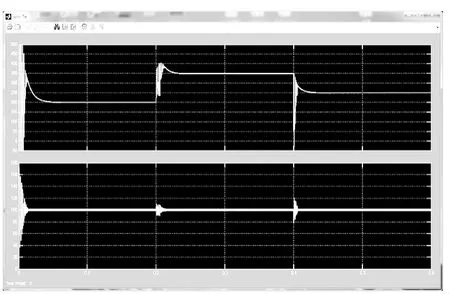
图6 速度变化时,电机的响应曲线Fig.6 Response curve of the motor when speed changes
5 结 语
DSP 的运算能力比较强,能够实现比较复杂的控制算法,因此本文通过DSP 运用模糊PID 算法来控制无刷直流电机,对高性能的推进电机在电力推进船舶中的应用进行探索。实验证明,基于DSP 的PID 算法在小型船舶直流无刷电机控制系统中的实际运行效果良好,能够提高电机性能,能够输出更优越的转矩和转速。
[1]王国伟. 基于DSP2812 的无刷直流电机控制系统研究[D].合肥:安徽大学,2010.
[2]芮江,由大伟.舰船综合电力推进技术的现状和发展趋势[J].舰船科学技术,2010,32(4):3 -6.RUI Jiang,YOU Da-wei. Survey and preview on warship integrated electric propulsion [J]. Ship Science and Technology,2010,32(4):3 -6.
[3]葛俊峰.基于DSP 的无刷直流电机控制系统设计[J].赤峰学院学报(自然科学版),2015(1):47 -48.
[4]汤建华,赵乌恩,杨子龙.船舶综合电力推进技术发展思路研究[J].舰船科学技术,2010,32(5):133 -138.TANG Jian-hua,ZHAO Wue-en,YANG Zi-long. Research on ship′ integrated power system development notion[J].Ship Science and Technology,2010,32(5):133 -138.
[5]韩俊青.小型船舶直流无刷推进器控制系统[J]. 舰船科学技术,2015,37(3):151 -154,159.HAN Jun-qing. Research and design of control system for DC brushless propulsion motor on the small ship[J]. Ship Science and Technology,2015,37(3):151 -154,159.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
九江学院学报(自然科学版)(2022年2期)2022-07-02
机电信息(2022年9期)2022-05-07
宁夏电力(2022年1期)2022-04-29
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年6期)2022-01-17
计算机仿真(2021年11期)2021-12-10
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电子制作(2019年10期)2019-06-17
