高空挂拆接地线自动机械手
2015-12-22 07:32马庆龙熊超段军鹏
云南电力技术 2015年3期
马庆龙,熊超,段军鹏
(1.云南电网有限责任公司楚雄供电局,云南 楚雄 675000;2.深圳广明科技有限公司,广东 深圳 518100)
高空挂拆接地线自动机械手
马庆龙,熊超,段军鹏
(1.云南电网有限责任公司楚雄供电局,云南 楚雄 675000;2.深圳广明科技有限公司,广东 深圳 518100)
以某500 kV变电站20米高空挂拆接地线为例,介绍了一种用于高空挂拆接地线的自动机械手的设计原理,用机械手代替传统人工操作来挂拆接地线,降低风险和对人体的伤害。
机械手;挂拆接地线;自动化
0 前言
装拆接地的操作是电气中危险性较大的操作,将机器人技术与装拆接地操作结合起来,克服在高空装拆接地操作的弊端就日益显得突出。以下从实用出发,分析探讨如何通过机械手的运用进行挂拆接地操作。
1 自动挂拆接地线机械手设计
建立500 kV高雅输电线路高空挂拆接地线的作业模型,研制新型机器人挂拆接地线可视化平台,由机械手代替人工作业,由可视化手持智能终站控制无限机器人进行作业支持矢量地图,3D卫星地图,支持多用户监视,彻底改变传统人工装拆500 kV高压线路接地线的危险性大的工作,缩短停电检修时间,降低风险和对人体的伤害。
2 硬件设计
机械手采用三坐标工作原理:分别为X轴,Y轴,Z轴三个方向,这样可以有效的控制机械手工作的可调节性;传动结构我们采用滚珠丝杆,直线导轨,密封角接触轴承,连接器,同步带和同步带轮,保证精确传动,准确定位,可有效的代替人工作业,同时也避免人工的触电风险。电机采用的是57步进电机和配套的驱动器,完成全部行程,在可控制的情况下,2~3分钟内完成全部行程,在高空作业的机械手,可以在无风险的前提下完成机械手挂接线工作,同时,设计了可随时分离的电动夹具,快速夹具夹住高压线可进行分析和检测,机械手的操作采用手持无线控制。
其工作过程是57步进马达接收到工作信号后转动-带动马达连接套转动-带动梯形丝杆转动-可活动夹口上下运动可对高压线进行夹住和方开;另外一个57步进马达和一个传感器负责对电动夹具进行左右旋转30度的工作,对于左右旋转的度数可在程序里设定。
机械手的设计套缸式升降平台 (如图1)采用PLC,实现机电一体化控制,平台配置双轴倾角传感器,有超重、倾斜、安全锁、自动化特定功能,采用进口密封件,动力系统采用3 kW直流电机,可根据客户的工作领域设置,拥有直立式操作平台,电控操作手柄,液压转向机构,液压支腿,液压升降系统,配置双液压泵驱动,使设备升降速度更稳定可靠。
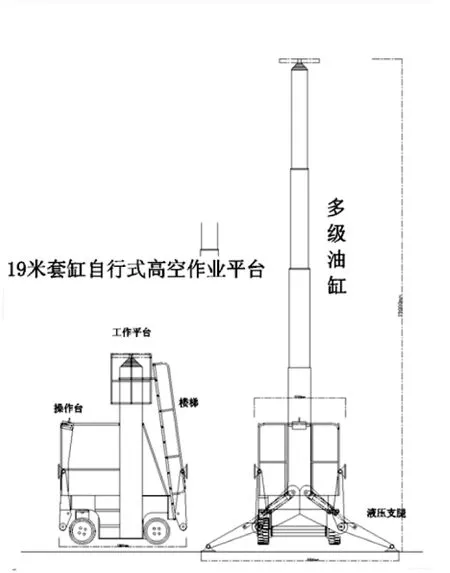
图1 高空自行式套缸升降机机械图
3 软件设计
无线视频设计拟采用OpenWrt-RT5350嵌入式Linux,Android应用的界面技术,应用开发的一项重要内容就是开发一个提供友好用户图形界面的应用程序Android移动终端如果提供了硬件解码的功能,这个框架就会优先调用硬解码,如果Android移动设备硬件没有提供硬解码功能,则会自动调用FFmpeg的软解码 (如图2)。

图2
在解决高空挂拆接地线机械手设计中的现场实施监控中,拟采用目前较为流行的H.264视频压缩与现场实际情况相结合的算法,以确保高速准确的通信。
TMS320DM365处理器提供一个硬件实现的H.265压缩部件。TMS320DM365通过采集到MT9P031传感器的原始数据,将图像和时序配合,组成一帧图像。将实时图像压缩,减少后续对网络的传输压力。本设计选用TMS320DM365,针对网络传输720P每秒30帧的数据要求。
本系统是网络产品范畴,而TMS320DM365具有MAC,外扩一片PHY就组成了完整的网络传输物理接口。本方案选用KS8001L作为以太网的PHY。网络通过RJ45网络变压器将信号引入KS8001L,经过KS8001L内部MII接口,将信号转换为TMS320DM365处理器的MII信号输入。实现网络功能。同时,TMS320DM365的Linux嵌入式操作系统内,建立了一个实时图像的Web? server。通过以太网网络互联。实现终端对TMS320DM365的Web访问,实现的实时图像的传输。同时在终端,根据实时图像,控制挂线机器人动作,指令通过以太网发送给TMS320DM365处理器,TMS320DM365处理器接收到控制指令解析。TMS320DM365通过RS485总线,将控制信息发送至挂线机器人的控制器,以实现挂线机器人的工作动作控制。
该系统由图像传感器、TMS320DM365处理器、网络、机器人控制器接口、辅助电源等组成。
同时,如何进行大型步进电机的精确控制,以及机器人手臂的动作精度控制,如何确保系统的实时性和精确性,需要较为复杂的智能神经网络PID控制算法,目前此算法还在试验当中。
4 结束语
1)电动通用机械手,相对于专用机械手,通用机械手的自由度可变,控制程序可调,因此适用面更广。
2)采用电机传动,动作迅速,反应灵敏,能实现过载保护,便于自动控制。工作环境适应性好,不会因环境变化影响传动及控制性能。阻力损失和泄漏较小,不会污染环境。同时成本低廉。
3)通过对传动系统工作原理的概述,节省了大量时间和避免了不必要的重复劳动,同时做到了图纸的统一规范。具有可靠性高、改变程序灵活等优点,无论是进行时间控制还是行程控制或混合控制,都可通过设定程序来实现。可以根据机械手的动作顺序修改程序,使机械手的通用性更强。
[1] 郭洪红,贺继林等.工业机器人技术 [M].西安电子科技大学出版社,2006.
[2] 陈仲爽.自动生产线装卸工件机械手设计 [D].铜陵学院学士论文, [3] 黄贤新.工业机器人机械手设计 [J].装备制造技术,2012(3):220-222.
[4] 冯新刚,张新予,杜小兵.基于机井救援的机械手设计[J].煤矿安全,2011(6):88-89
[5] 张海英,陈子珍,翟志永.基于PLC的无聊搬运机械手设计 [J].制造业信息化,2010(9):83-84
[6] 日本三菱公司.三菱PLC编程说明书 [Z]
马庆龙,男,工程师,云南电网有限责任公司楚雄供电局。
席立平,男,深圳广明科技有限公司。
Design of Automatic Mechanical Handing Ground in High-altitude
MA Qinglong,XIONG Chao,DUAN Junpeng
(1.Chuxiong Power Supply Bureau,Yunnan Power Grid,Chuxiong,Yunnan 675000,China;2.Shenzhen Guangming science and Technology Co.Ltd.,Shenzhen,Guangdong 518100,China)
.This paper takes the Yunnan power grid 500 kV substation 20 meters altitude peacehanging and disassembling grounding line as an example to introduce a kind ofhanging and disassembling design principle of automatic mechanical hand ground wireis used for high altitude,handheld intelligent terminal operations byvisualization of vector map contol infinite robot,3D satellite map,support for multiple users to monitor,manipulator to replace the traditional manual operation to hang downground,reduce the risk and the harm to the human body.
manipulator;hanging?down?grounding wire;automation
TM75
B
1006-7345(2015)03-0081-02
2015-1-9
猜你喜欢
保健与生活(2022年7期)2022-04-08
环球时报(2022-02-28)2022-02-28
金沙江文艺(2022年2期)2022-02-20
金沙江文艺(2021年10期)2021-10-08
云南画报(2021年1期)2021-06-11
装备制造技术(2020年4期)2020-12-25
小天使·一年级语数英综合(2019年2期)2019-01-10
小天使·一年级语数英综合(2018年11期)2018-11-23
制造技术与机床(2018年11期)2018-11-23
小学阅读指南·低年级版(2018年5期)2018-11-02