
动态力校准技术评述
2015-12-23 07:16尹肖,王宇,杨军
计测技术 2015年2期
动态力校准技术评述
尹肖,王宇,杨军
(中航工业北京长城计量测试技术研究所,北京100095)
摘要:动态力校准技术应用日益广泛,其测量结果的精度要求越来越高,因此对动态力校准技术的研究具有十分重要的意义。本文简单介绍了实际工程中动态力校准技术的应用与需求,指出了动态力校准技术研究的重要性,总结了目前动态力校准的主要体系,并对各种动态力校准方法的原理、主要特点以及校准装置进行了分类介绍。
关键词:动态力;校准;力传感器;激励源
中图分类号:TB935文献标识吗:A
doi:10.11823/j.issn.1674-5795.2015.02.02
收稿日期:2015-03-18
基金项目:国家“十二五”技术基础科研项目(JSJC2012205B002)
作者简介:尹肖(1989-)男,硕士,从事动态力校准方面的研究;王宇(1978-)高级工程师,博士,研究方向为力学量动态校准、动态激励源设计与性能评价方法研究。
Review of the Calibration Technique for Dynamic Force
YIN Xiao,WANG Yu,YANG Jun
(Changcheng Institute of Metrology & Measurement,Beijing 100095,China)
Abstract:The calibration technique of dynamic force is widely used,and the measurement accuracy becomes increasingly demanding.It is important to study the calibration technique of dynamic force.This article introduces application and demand of the calibration technique in practical engineering,points out the importance of the study,sums up the main system of the calibration for dynamic force,and describes the principles,main characteristics and devices of dynamic calibration.
Key words:dynamic force;calibration;force sensor;excitation source

0引言
动态力是随时间变化的力,通常采用各种力传感器进行动态力测量。目前,对绝大多数力传感器仅进行静态校准,由此导致动态力测量准确度很低(有时测量误差甚至达到实际力值的几倍)。因此,针对力传感器的动态校准具有十分重要的意义。本文总结了国内外动态力校准技术的发展现状,介绍了动态力校准的各种方法以及相应装置,并就动态力校准技术的发展给出了具体建议。
1动态力校准技术的应用与需求
动态力校准技术在实际工程中的应用范围不断扩大,几乎涉及到建筑工程、交通运输、机械加工、仪器仪表等各个领域,特别是在飞行器和武器装备研制与生产过程中,动态力测量的需求更是不断增加。主要领域包括:
1)飞行器控制。嫦娥工程飞行器空间对接试验中,需要根据测量的动态力值进行姿态调整从而实现对接,动态力是关键的控制参数;战略导弹及其它飞行器采用舵机进行飞行控制,动态力是重要的反馈量,力值的相位准确与否直接关系到飞行控制的精度。
2)武器系统试验。各种火炮、导弹发射过程中,武器各部位动态力测量对提高武器系统的性能和可靠性具有重要意义;新型飞机及导弹空气动力学试验中,动态力是重要的被测量;武器系统威力、人员及设施安全防护试验中,动态力是主要参数之一。
3)材料性能试验。材料机械性能试验中,试件的各类疲劳及冲击试验需要测量动态力。
4)生产过程质量控制。机械装配过程压装力的控制;焊接、铆接过程力的监测;高精度机械加工过程力的监测与控制等对提高产品质量具有重要意义。许多零部件在完成加工或组装后很难进行全面质量检测,在产品加工过程中进行质量控制是非常重要的。在生产过程中进行动态力测量不仅可以提高加工水平和效率,而且对提高产品质量、降低成本具有重要意义。
2动态力校准体系
动态力校准经过几十年的发展,出现了相对完备的校准体系,从实际应用中主要可以分为绝对法(激光干涉)校准[1]、比较法校准[1]、现场校准。
1)绝对法(激光干涉)校准
绝对法(激光干涉)是通过激光多普勒系统直接测量安装在被校传感器上的质量块上表面,当质量块受到振动或冲击作用时,通过激光干涉仪来确定运动体速度随时间的变化情况,其复现的加速度量值直接溯源到计量的基本量——时间和长度,再利用质量作为可靠的中间量,就可完成动态力的绝对复现。此过程中有关的运动量与被校传感器的输出完全无关,该测量过程符合计量学对绝对法的定义和要求。在完成力值复现后,通过比较将力值传递给被校传感器,可以对被校传感器的计量性能和动态特性做出完整客观的评定。力传感器绝对法校准框图如图1所示。

图1 力传感器绝对法校准方框图
2)比较法校准
比较法校准是通过标准加速度计测量质量块的加速度,利用质量作为可靠中间量,实现动态力值的复现,将复现的力值与被校力传感器的测量结果进行对比来得到校准结果。用该方法校准时质量块作用在被校力传感器上,产生动态信号,此时标准加速度测量系统与被校力传感器测量系统同时响应,并记录下动态力值。该方法易受到标准加速度计自身误差的影响,因而其校准不确定度的要求不易得到满足;该方法测量比较简单方便,主要适用于校准精度要求不太高或者实地校准条件较复杂的情况。力传感器比较法校准框图如图2所示。
3)现场校准
动态力现场校准是利用现场条件,将仪器或设备的待测力部位接入标准力传感器进行测量,将其与仪器设备自带的力传感器的测量结果进行对比来得到校准结果。现场校准主要适用于仪器较大或较精密不易移动的情况。下面以疲劳试验机的现场校准[2]为例作简单介绍。对动态力的现场校准实际就是对试样实际承受的力值与试验机自带的传感器所显示的力值的偏差进行动态力校准,这也是疲劳试验机动态力校准的主要目的。产生力值误差的主要原因是:试样与试验机自带传感器之间的单元也有一定质量,该质量在动态载荷作用下会在试验机自带的传感器上产生附加惯性力。在对疲劳试验机进行动态力校准时,会根据疲劳试验机的频率范围及力值测量范围来选取标准力传感器,因此选择的力传感器刚度较高、力值较大、中低频特性较好。用疲劳试验机动态力校准装置进行的现场校准如图3所示。

图2 力传感器比较法校准方框图

图3 用疲劳试验机动态力校准装置进行的现场校准
3动态力校准方法及装置介绍
目前根据校准装置的激励源的不同可将动态力校准方法分为脉冲式动态力校准、稳态正弦动态力校准、阶跃式动态力校准。
3.1脉冲式动态力校准
脉冲式动态力校准是利用脉冲信号宽的幅频特性研究被校力传感器的动态特性,而脉冲信号是通过各种激励源产生的,最典型的一类为半正弦脉冲信号。国内外许多计量机构和大学都建立了不同的脉冲式动态力校准装置,下面对几种具有代表性的校准装置进行介绍。
1)中国计量院的脉冲力校准装置
中国计量院在上世纪80年代采用自由下落的重锤与力传感器碰撞的方式产生波形为半正弦的动态力,并使用标准加速度计进行脉冲力值测量,该装置可以产生500 N~1 MN的脉冲式动态力输入。近些年,中国计量院研发了可以产生500 N~200 kN的脉冲式动态力输入的新装置[3],其力值上升时间大于等于0.3 ms,扩展不确定度为2%(k=3),基本结构与原装置相似,如图4所示。新装置用激光干涉仪取代了标准加速度计,并安装在装置的顶端;新装置具有自动调整落锤对中、可以适应不同大小尺寸标准落锤的能力,其自动化水平也较老装置有所提高。

图4 200 kN激光绝对法动态力校准装置
2)德国PTB的脉冲力校准装置
德国PTB在2003年建立了瞬态动态力校准装置[4],2012年对其进行升级改造时,利用激光干涉绝对法进行动态力校准,校准装置[5]如图5所示。该校准装置可以产生持续时间约为0.5 ms且力值为20 kN的最大瞬态脉冲。两质量块安置在气浮轴承内,其中一质量块在运动发生器作用下与安装在另一质量块上的力传感器发生对中碰撞,他们的速度变化由按V形放置的两组激光测振仪分别测出,此时力传感器所受的动态力可溯源到质量和加速度。该装置消除了安装精度、质量块制造、气浮轴承自身的精度所导致的横向运动分量,因此可以认为被校力传感器只受质量块与气浮轴承之间产生的摩擦力及激励源产生的脉冲力。德国PTB在2010年研究完成了250 kN力冲击校准装置[6],如图6所示,其主要工作原理与20 kN瞬态动态力校准的原理类似。

图5 德国PTB 20 kN瞬态动态力校准装置

图6 德国PTB 250 kN力冲击校准装置
3)日本研究的脉冲力校准装置
日本GUNMA大学研究人员研制了基于质量块碰撞与激光干涉测量的脉冲式动态力发生装置[7]。其主要结构包括三部分:一个基于线性气浮导轨支撑的移动质量块、用于安装被测传感器的基座和激光测量系统,结构图如图7所示。其原理与德国PTB基本一致,都是将脉冲式动态力溯源到质量、长度和时间三个基本量,通过标准的质量块对被测传感器施加脉冲力激励,再通过激光干涉技术对冲击过程进行测量,进而得出施加脉冲力大小,系统对被测传感器的动态响应进行评价。日本研究人员研制的这套系统也是通过质量块碰撞被测传感器产生脉冲式动态力,通过激光测量系统进行数据分析,该装置还可以在添加其他配件后产生正弦式及阶跃式的动态力。

图7 日本研究的脉冲式动态力装置
4)中航工业计量所正在建立的脉冲力校准装置
根据现有的脉冲力发生器的原理以及使用一套脉冲力发生装置很难覆盖项目研究的全部力值范围,在设计脉冲力校准装置时,考虑到了根据不同的量程范围、采用不同原理的大小两套脉冲力发生器。其中:小幅值脉冲力发生器采用气动上抛质量块的冲击方法,力值范围控制在100 N~2 kN,如图8(a)所示;大幅值脉冲力发生器采用自由落锤冲击方法,力值范围控制在2~120 kN,如图8(b)所示。激光干涉测量系统采用激光多普勒测速原理,直接测量质量块、锤体的运动参数(位移、速度、加速度),通过对脉冲力发生器的动力学分析,转化为力的变化;安装在砧体或基座上的被校力传感器(测试系统)感受力脉冲,其输出电信号被同步采集。电信号的输出峰值与激光干涉测量系统测试计算得到的力脉冲峰值进行比较即可得到被校力传感器(测试系统)的动态灵敏度。
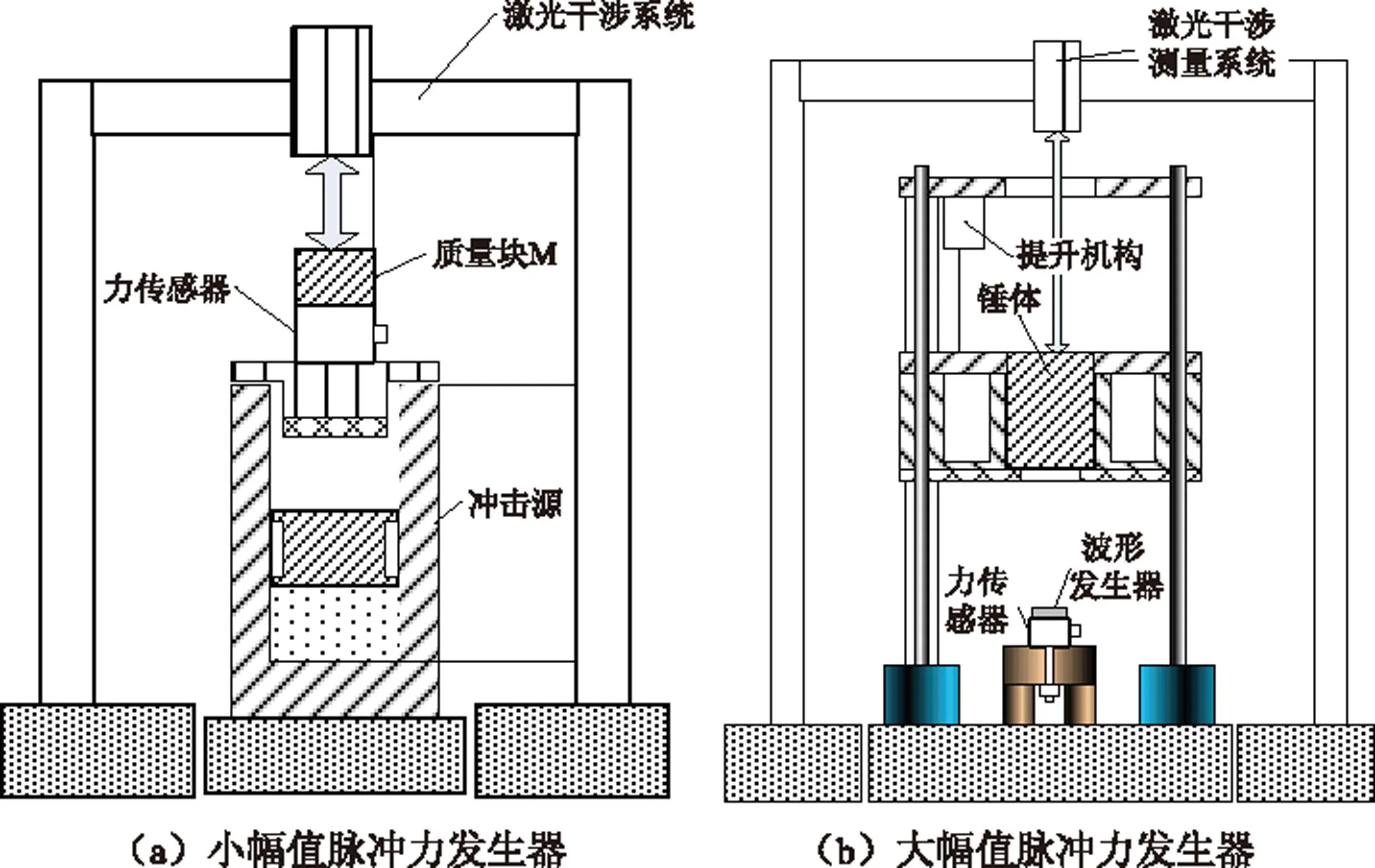
图8 中航工业计量所在研的脉冲力校准装置
3.2稳态正弦动态力校准
稳态正弦动态力校准是以振动台为激振力源产生正弦力信号,通过扫频的方法得出力传感器的动态特性[8]。标准正弦信号由信号源产生,通过改变信号源输出的幅值及频率来得到不同的标准正弦信号,其经功率放大器放大后推动振动台工作。被校力传感器一端安装在振动台台面上另一端连接负载质量块,可以通过安装在质量块上的标准加速度计或隔振平台上的激光干涉仪来测量质量块的加速度。
各国的稳态正弦力校准装置的工作原理基本上是一致的。中航工业计量所在“十一五”期间研制了基于激光干涉法的10 kN正弦力校准装置[9],频率范围20~2000 Hz,力值范围1 N~10 kN,如图9(a)所示;德国PTB在JRP项目中研制了三套力值范围不同的正弦力校准装置[10],频率范围10~1000 Hz,如图9(b)所示;西班牙CEM和法国LNE也在JRP项目中共同研制了一套正弦力校准装置[10],频率范围10~1000 Hz,如图9(c)所示。

图9 各国稳态正弦力校准装置
3.3阶跃式动态力校准
阶跃类力信号和脉冲类力信号类似,但阶跃式动态力校准方法的可校频带更宽,因为阶跃信号在较宽的频率范围内都有频谱分量。除此之外,阶跃式动态力校准可以实现较大的动态力幅值,且该力源易于实现,尤其是负阶跃力。阶跃力校准装置一般通过脆性梁的瞬间断裂获得正阶跃或负阶跃力[11],例如直压式落锤冲击或剪切式卸载的方法等。
浙江大学研制的1200 kN标准负阶跃力源系统[12]是一种比较具有代表性的阶跃式动态力校准装置,该装置采用直压式落锤冲击卸荷法来产生负阶跃力,如图10所示。在该装置中可以将落锤在不同高度落下,来改变其冲击能量,以此来产生不同力值及频率的阶跃力信号,再通过激光干涉仪测量动态激励力,同时用数据采集卡采集力传感器输出电压,将获得的波形数据进行时域和频域分析,以此来获得被校力传感器的动态特性。

图10 浙江大学研制的1200 kN标准负阶跃力源系统
北京航空航天大学研制的196 kN动态力校准装置[13]是另一种阶跃力校准发生装置的代表,如图11所示。该装置通过压力控制系统对液压油缸进行加压,油缸内的压强变大推动活塞杆对托板进行加力,这个力通过支撑块、脆性材料以及压块最终传递到力传感器,在这个力传递的过程中脆性材料会受到弯曲载荷,此时力传感器受到的是静态力。这套装置产生负阶跃力的原理是通过脆性材料片发生断裂使力传感器受到的力会突然变为零。该校准系统中力传感器实际应受到的力值可以通过压力表测量液压油缸内的压力得到。

图11 北京航空航天大学的196 kN动态力校准装
除此之外,北京理工大学在2006年“动态力值校准新技术新方法研究”中实现了100 kN负阶跃力下力传感器动态性能测试[14]。中航工业计量所在“七五”、“八五”期间采用负阶跃力实现力传感器动态特性研究[15-16],阶跃式动态力标准采用快速卸荷的方法产生负阶跃力[17],其最大力值可以达到1.2 MN,负阶跃力的下降时间为10μs至100μs。合肥工业大学等也对阶跃力校准技术进行了一些有价值的研究[18]。
4结论
本文通过对实际工程中动态力测量技术应用与需求的例举,说明了动态力校准技术的重要性。在此基础上,本文归纳了动态力校准技术的校准体系,重点介绍了动态力校准方法及校准装置,并从各装置中发现存在且需要改善的问题。
正弦力校准中由于质量块的大小及形状会影响加速度分布[19],会对加速度的测量产生0.5%以上的误差;在不同激励条件下,会因为激励或加载装置等结构的不同使获得的传感器灵敏度存在较明显的差异;动态力现场校准的需求日益增多,但由于校准环境复杂、现场不确定因素多,导致动态力现场校准发展缓慢;随着动态力校准所涉及领域的扩大,现有装置的可校准力值及频率已无法达到实际要求。根据当前动态力校准技术发展所存在的这些问题,本文认为应重视以下几个方面的研究:质量块大小形状以及加速度分布的研究;传感器灵敏度一致性问题的研究;现场校准技术的研究;校准的力值范围及频率响应范围的扩展。
参考文献
[1] 曾利民,尚贤平,杨莹,等.加速度冲击校准研究[J].工业计量,2012,22(3):1-4.
[2] 胡刚,杨宗英.基于振动分析的单轴疲劳试验机动态力误差的研究与试验[J].船舶工程,2012,34(2):73-76.
[3] 孟峰,张跃,李涛,张智敏,张伟.脉冲式动态力校准装置的研究[J].船舶工程,2012,34(S2):77-79.
[4] Kobusch M,Bruns T.The new impact force machine at PTB[C]//Proc.of XVII IMEKO World Congress.Dubrovnik,Croatia:IMEKO,2003,263-267.
[5] Kobusch M,Link A,Buss A,et al.Comparison of Shock and Sine Force Calibration Methods[C]// Proc.of IMEKO 20th TC3,3rd TC16 and 1st TC22 international conference .Merida,Mexico:IMEKO,2007.
[6] Thomas Bruns,Leonard Klaus,Michael Müller,The 250 Kilonewton Primary Shock Force Calibration Devic at PTB[C]// Proc.IMEKO 2010 TC3,TC5 and TC22 Joint Conference. Pattaya,Thailand:IMEKO,2010.
[7] 孟峰,张跃,张智敏,等.脉冲式动态力校准装置发展动态[J].计量技术,2011,(5):47-50.
[8] 何闻.标准动态力发生装置国内外研究现状[J].机电工程,1999,(2):47-49.
[9] 张力.激光干涉法进行正弦力校准研究[J].计量学报,2005,26(4):337-342.
[10] Bartoli C.Traceable dynamic measurement of mechanical quantities:Objectives and first results of the European Project[C]// Proc.of IMEKO World Congress.Busan,Korea:IMEKO,2012.
[11] 商佳尚,王宇.动态力校准中需要规范的若干问题[J].计测技术,2014,34(2):1-5.
[12] 何闻.大力值宽频带标准负阶跃力的产生机理和计量技术的研究[D].杭州:浙江大学,1997.
[13] 黄钦俊,王效葵,李行善,等.力传感器的动态重复性、线性度与性能改进的研究[J].计量学报.1995,16(1):58-67.
[14] 张训文,肖跃华,郭红日,等.100 kN气动助推式负阶跃力校准装置[J].测试技术学报,2004,18(S0):89-92.
[15] 周小宁.用动力学方法分析力传感器动态标定装置[J].航空计测技术,1994,14(2):12-15.
[16] 殳伟群.从负阶跃响应到二阶系统传递函数[J].航空计测技术,1992,12(1):21-25.
[17] 国家质量技术监督局.JJF1053-1996负荷传感器动态特性校准规范[S].北京:中国计量出版社,1996.
[18] 徐科军.冲击响应法动态标空中激励信号的研究[J].合肥工业大学学报,1995,18(3):102-107.
[19] 王宇,张力,张立喆,等.正弦力校准中质量块加速度分布影响的理论修正研究[J].计测技术,2010,30(3):1-4.
