
浅谈直升机飞行操纵及控制系统
2015-12-26 15:30徐琼琼
科学家 2015年10期
关键词:直升机
徐琼琼
摘要 直升机飞行操纵系统和飞行控制系统是直升机上重要的两个系统,直升机由于其独特的飞行方式,导致它的操纵方式与固定翼飞机完全不同,直升机飞行控制系统是在飞行操纵系统的基础上通过加装辅助舵机,提高全机的稳定性和操纵性;直升机旋翼的特点决定了直升机具有强耦合,弱稳定的等特性,这也给飞行操纵及控制系统的设计提出了很高的要求。本文简单描述了直升机飞行操纵及控制系统的特点,以及两者之间的交联设计特点及其应用。
关键词 直升机;飞行操纵;飞行控制;交联设计
中图分类号 V2
文献标识码 A
文章编号2095-6363(2015)10-0025-02
1 直升机概述
直升机能够垂直起降,能在空中向前、后、左、右各个方向任意运动,并且还能在一定高度保持悬停,对起落场地质量要求也不高。上述这些特点,使它日益广泛地运用于军事和民用的各个方面。直升机不仅在国民经济各个部门(如农牧渔业、地质、石油、交通、电力和公安等)用作交通运输、施肥灭虫、地质勘探、海上石油开采、消防灭火、应急救生、吊装巡线、城市治安、海关缉私等任务,而且在军事上用作通信联络、边境巡逻、炮兵观测、后勤支援、战地救护、袭击登陆等任务,武装直升机还可执行对地火力支援、攻击地面目标、反坦克、反潜艇、布雷和扫雷、以及与敌方武装直升机进行空战等任务。
按结构型式,可分为如下几种。
1)单旋翼带尾桨直升机。这种直升机的旋翼反作用扭矩靠尾桨推力来平衡。优点是构造简单、操纵系统简单、成本较低。缺点是尾桨造成功率损失,重心定位范围窄,尾部长,尺寸大。直8、直9均为此种型式。
2)共轴式双旋翼直升机。两副旋转方向相反的旋翼安装在一根轴上,旋翼的反作用扭矩互相平衡。共轴式直升机由于机身短,外形好,因而正面阻力小,而且外廓尺寸也小。缺点是操纵系统及传动机构复杂,旋翼有相互干扰,方向稳定性不够。代表机种如前苏联的卡-28。
3)纵列式双旋翼直升机。这种型式的直升机的两个旋翼分别安装在机身前后端。后面的旋翼通常高于前面旋翼的旋转平面。这种型式的优点是纵向稳定性好,重心定位范围广,重量效率高,机身有效容积大,但是传动系统复杂,平飞时诱导损失大,利用旋翼自转进行滑翔降落困难。代表机种为美国的CH-47型直升机。
4)横列式双旋翼直升机。它有两个位于机身两侧并在同一平面内反向旋转的旋翼。这种直升机的优点是操纵性及对纵轴和横轴的稳定性好,两个旋翼存在有利的相互影响,平飞诱导损失小,因此经济性较好,并且能保证乘员乘坐舒适。缺点是构造复杂,操纵系统复杂,迎风阻力大。代表机种如前苏联的米-12。
5)交叉式双旋翼直升机。这种直升机的两个旋翼位于机身两侧,但两个桨毂之间很近。旋翼转轴向外倾斜,旋翼的旋转必须协调以免相碰。两个旋翼的反作用扭矩对直升机的垂直轴平衡,但对横轴的分量则要相加,因此会产生俯仰力矩。这种型式的优点是正面阻力小,外廓尺寸小。但传动系统复杂,桨尖可能碰地,不安全,直升机的平衡复杂。代表机种如美国的K-max。
6)倾转旋翼机。这种型式的直升机在起飞时象横列式直升机,起飞后旋翼轴相对于机体向前倾转,旋翼锥体也随之前倒,直升机逐渐转入前飞,过渡到平飞时就象普通的固定翼飞机那样,靠机翼产生升力,靠转轴近于水平的旋翼产生向前的力。代表机种为美国的v-22“鱼鹰”。
2 直升机飞行操纵系统
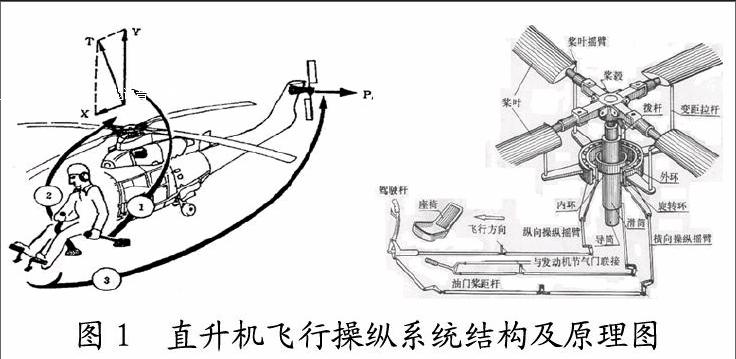
直升机在空中有六个自由度,即沿X、Y、Z三轴的移动和绕这三个轴的转动。稳定飞行时,直升机处于一种平衡状态,作用在它上面的力和力矩合力为零。若要改变直升机的飞行状态,必须对它进行操纵。所谓操纵就是改变作用在直升机上的力和力矩,即打破原来的平衡状态,建立新的平衡状态,直升机操纵具有以下特点。
1)对于直升机的6个运动自由度,只有4个直接的飞行操纵,(注:还有一个操纵是对发动机转速或功率控制),因而对各自由度的控制并非彼此独立。
2)直升机对操纵的响应,各轴间耦合严重(对扰动的响应也是如此),须由驾驶员或SCAS的修正动作予以消除。
3)升降、俯仰、滚转操纵,皆经过旋翼挥舞这一环节,所以直升机响应滞后较大,而且挥舞惯性抑制了对于高频操纵输入的响应,起着过滤器的作用。驾驶员通过飞行操纵系统改变主旋翼和尾桨的桨距角,从而改变直升机的高度、速度和航向,以控制直升机的飞行。总桨距操纵杆能同时改变所有桨叶的桨距角,从而改变主旋翼的升力(FN)的大小。周期变距操纵杆能使主桨叶桨距角产生周期性的改变,来操纵旋翼桨盘的倾斜角,从而控制升力(FN)的方向。脚蹬的作用是改变尾桨的推力(TY)的大小来实现直升机的航向操纵。
由于现代的直升机的铰链力矩一般比较大、飞行品质要求高并且不可逆助力器的技术已经相当成熟,所以通常采用不可逆助力操纵型式;对于铰链力矩较小并且给驾驶员带来的载荷负担很小的直升机,可以考虑采用纯机械操纵系统。
机械飞行操纵系统的线系一般有三种型式:硬式操纵、软式操纵、软硬混合式操纵。直升机纵向、横向及总距操纵系统通常为硬式操纵;航向操纵系统可以为硬式操纵或软、硬混合操纵;助力器之后的线系部分则多为硬式操纵。
3 直升机飞行控制系统
直升机有其独特的优点,能够垂直起落不需要机场跑道,能够空中悬停便于观察和救护,能够任意方向飞行(前飞,侧飞,后飞等)机动灵活。但直升机也存在自身的缺点,如:载重较小,经济性低,振动较大,舒适性差,操纵困难,稳定性差等。
直升机作为控制对象,与固定翼飞机相比具有更复杂的气动特性。如果把固定翼飞机看成六自由度的运动体,那么对直升机而言,还必须考虑旋翼和尾桨对机身的转动,桨叶相对于铰链接头的转动。除此之外,直升机本身还有一系列的特殊飞行状态,例如悬停、垂直起落、自旋等。
由于直升机动特性的不稳定,对电子反馈的依赖性大。目前世界上所有直升机的动特性都是不稳定的,不稳定的程度与直升机结构与飞行状态密切相关。不稳定的程度主要表现在纵向运动,特征根出现一对正实部的复根,表现为长周期运动不稳定。
直升机各控制通道之间存在着严重的气动耦合。由于直升机与固定翼飞机相比有更复杂的气动特征与更特殊的飞行状态,四个控制通道间存在着强轴间的耦合,在悬停状态时更是如此。人工驾驶时必须由驾驶员进行复杂、紧张的控制协调,其驾驶难度比一般的飞机大得多。俯仰与横滚交叉耦合,总距与俯仰,总距与航向之间的交叉耦合已成为直升机影响操纵品质的主要因素。因此解耦设计已成为直升机控制界普遍关注的研究课题。
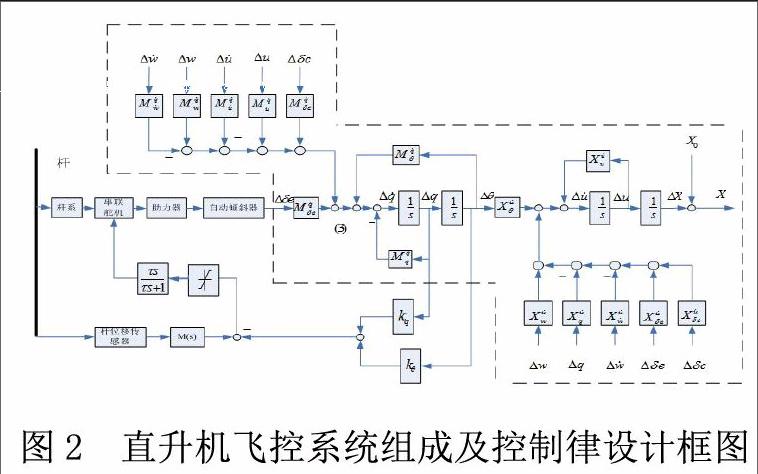
直升机飞控系统通常由计算机、串联舵机、并联舵机和操纵台组成,其控制原理是使用组合导航系统测量直升机的姿态、姿态角速率、线加速度等飞行参数,使用大气速度系统测量直升机的空速、气压高度和垂直速度等飞行参数,这些参数送入飞控计算机进行控制率解算,再经过伺服回路驱动串联、并联舵机操纵液压助力器实现俯仰、横滚周期变距、尾桨变距和总距,使得直升机产生抬(低)头、左(右)滚转、左(右)偏航力矩,从而控制直升机。
典型的直升机飞控系统组成及控制律设计如图所示。
4 直升机飞行操纵及控制系统交联设计
现代直升机上,除机械人工操纵系统外,一般还有飞控系统(阻尼器、增稳系统或控制增稳系统)来改善直升机的操稳特性以及自动驾驶仪来减轻驾驶员负担和保证飞行安全。
飞控系统通常采用串联舵机作为其执行机构,串联舵机串联安装于机械杆系之中,置于助力器之前,人工操纵时作为一根普通拉杆使用,增强控制时它的工作杆伸缩带动其后面的线系和助力器运动,实现桨叶变距,而其前面的线系直至驾驶杆都保持位置不动。串联舵机与后面的线系、助力器、桨叶以及直升机组成通常所称的“内回路”。
飞控系统通常采用并联舵机作为其执行机构,并联舵机与整个机械杆系并联安装,它工作时将带动整个机械杆系连同驾驶杆一起运动。并联舵机与机械线系、助力器、桨叶以及直升机组成通常所称的“外回路”。
另外,增强系统和自动驾驶仪也可以将其执行机构(串联舵机和并联舵机)与助力器相复合在一起,组成复合舵机。
飞行操纵系统与飞行控制系统的区别与联系主要体现在以下几点。1)从功能上划分,飞行操纵系统实现驾驶员对直升机的开环操纵;飞行控制系统实现对直升机的闭环控制;2)从物理实现上划分,飞行操纵系统以机械液压为主;飞行控制系统:以电信号为主(模拟、离散、数字)。但飞行控制系统最终的变距实现必须借助与飞行操纵系统,所以两者之间就存在交联问题。
对于电传或光传飞控系统,由于物理实现上均是以电信号为主,所以从物理部件上已经很难将飞行操纵系统和自动飞控系统分开。其区别主要是功能上的,一般划分为主飞控系统和自动飞控系统,其实现均是通过传感部件、计算部件、执行部件等完成。
5 结论
本文对直升机飞行操纵系统和飞行控制系统进行简单综述,并且对两者之间的交联设计特点进行详细阐述了,希望能对初级入门的工程师具有一点参考意义。
猜你喜欢
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
小猕猴学习画刊(2022年12期)2022-02-06
军民两用技术与产品(2021年2期)2021-04-13
百科探秘·航空航天(2018年4期)2018-05-14
中国军转民(2017年8期)2017-12-13
百科探秘·航空航天(2017年10期)2017-11-08
创新作文(小学版)(2016年31期)2016-03-11
幼儿100(2016年36期)2016-02-28
海峡姐妹(2015年3期)2015-02-27
