雾天图像增强中Retinex算法的细节信息优化
2015-12-28 14:15陈静
物联网技术 2015年12期
陈静

摘 要:为了解决雾天图像增强中的细节信息优化问题,提出了一种新的基于亮度块Retinex算法的雾天图像增强方法。该方法首先采用背景亮度作为激励亮度值对图像的亮度块进行分割,然后采用不同尺度的增强因子对分割块进行增强,在对像素的边缘信息分割之后,再按照一定的比例对块信息进行融合。仿真结果显示:与传统的Retinex算法相比,基于亮度块的图像增强Retinex算法的信息熵较高,增强效果较好。
关键词:Retinex算法;图像增强;细节信息优化;亮度块;信息熵
中图分类号:TP391.41 文献标识码:A 文章编号:2095-1302(2015)12-00-02
0 引 言
图像增强是为了达到人们观察或机器分析和判别的目的从而在原始图像上采取的改进方法[1]。如今,因为人类活动对环境的破坏,导致雾霾现象经常出现。雾天环境下,户外景物的颜色及对比度都发生了退化,计算机视觉系统不能正确对场景中的目标进行检测和跟踪,因此需要对雾天图像作清晰化处理[2-4]。目前,雾天图像处理方法主要分为基于大气退化物理模型[5-7]的方法和增强对比度[8]这两种方法。
Retinex 算法是Land[9]等人在1964年提出的,现已从不同角度有所发展,虽然基于Retinex 算法的增强效果较好,但它忽略了雾天图像亮度较低的特点,使得处理结果色彩暗淡,细节表现力差[10]。为了解决现有的雾天图像增强中的细节处理问题,本文提出了一种基于亮度块的Retinex算法增强图像的细节。首先采用背景亮度作为激励亮度值对图像的亮度块进行分割,然后采用不同尺度的增强因子对分割块进行增强,最后在对像素的边缘信息分割之后,按照一定的比例对块信息进行融合。实验结果表明,与传统的Retinex算法相比,本文算法的信息熵较高,增强之后图像细节更丰富。
1 标准Retinex算法
2 改进的Retinex算法
2.1 亮度块分割
根据心理学韦伯定律,ΔB/B=K, B表示激励强度,ΔB表示最小的显著差别,K是一常数。引入背景强度代替激励强度,不同区域有不同的斜坡,每个区域分割成三个区域:饱和区、中亮度区和低亮度区。高亮度区由于受刺激饱和度的影响称作饱和区。中亮度区随亮度均匀变化,颜色信息丰富,因此人眼确定的主要区域集中在中亮度区。而在低亮度区,人眼很难感知到亮度的变化。
当像素满足B1≤B(x,y)≤B2和T(x,y)/B(x,y)≥T1时,该区域被判定为中亮度区;当像素满足B(x,y)≥B2和T(x,y)/B(x,y)2≥T2时,该区域被判定为饱和区;其它的为低亮度区。按照上述方法将图像的亮度分割为很多区域来实现不同图像分别实施图像增强的目的对对应的参数进行设置,a=0.01, b=0.7,m=0.8,n=1.6。
2.2 亮度块增强
在本文中,原始图像的3个分割区域的亮度定义为:低亮度区I1,中亮度区I2和饱和区I3。Retinex算法的计算过程不采用线性加权的方法而采用亮度区的划分结果,在不同的尺度σ上进行有针对性的Retinex 增强,从而集成了不同尺度高斯函数的优点。
由于中亮度区的视觉效果最好且更适合人眼观察效果,因此本文以中亮度区的处理为例。首先,采用尺度为σ2的高斯函数进行滤波操作得到区域的输入系数,然后从图像中减去输入系数得到反射系数,从而实现对亮度区的增强。将原始图像S用亮度I来表示,则可以用如下公式表示:
其中,F2(x,y)是尺度为σ2的高斯函数, I2(x,y)是分割之后亮度区的像素,与中亮度区的计算类似, 余下的饱和区和低亮度区同样采用独立处理方法进行处理,分别采用不同的高斯滤波器在不同的尺度上进行运算以实现不同亮度区的亮度增强,公式表达如下:
其中,Fk(x,y)是尺度为σk的高斯函数,Ik是不同的亮度区,k=1,2,3。*代表仅应用在对应亮度区Ik, k=1,2,3的高斯模版的中心核。
通过上述对不同亮度区的分别处理得到其对应的亮度区反射系数R1(x,y),R2(x,y)和R3(x,y),从而实现图像增强。
2.3 块信息融合
定义所有区域经过不同尺度处理之后的结果为:I'1,I'2,和I'3。选择区域中心像素点O(x,y)作为中心点,区域周边大小为N×N的方形窗口作为模版,窗口中低亮度区、中亮度区及饱和区的比例分别表示为p1, p2和p3,则信息融合的比例公式如下:
其中,N通常取奇数如3和5,以3×3的窗口为例,矩阵的中心点代表未知图像的亮度点。随着窗口选择的细化,计算量也随之增大。将最终结果的I'(x,y)与原始图像的H, S分量相结合就得到我们需要的增强结果。该算法只处理图像的亮度信息,因此,与原图像相比,增强的图像在颜色和饱和度上的失真较少,且视觉特征也得到了提高。
3 实验仿真
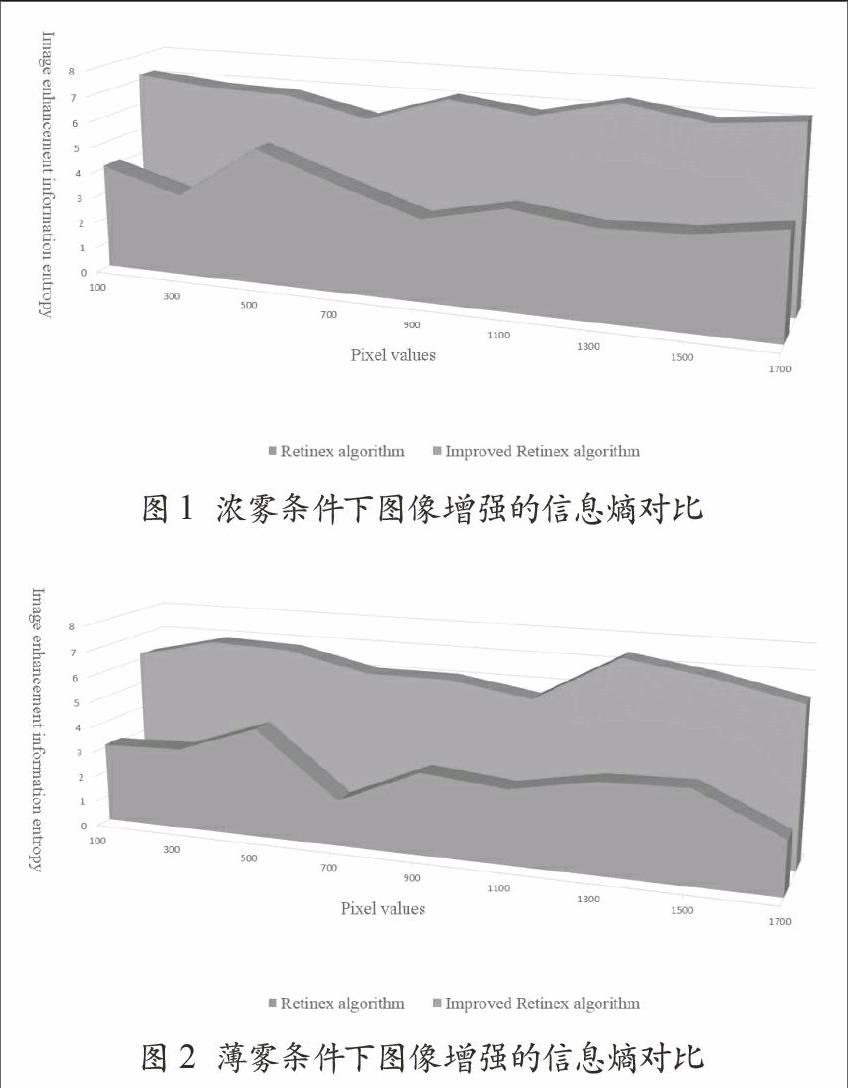
为了验证本文所提算法的有效性,进行了仿真实验并与传统的Retinex算法作比较。在浓雾和薄雾的实验条件下,比较了采用两种算法增强之后图像的信息熵,实验结果如图1和图2所示。
由图1和图2可以看出,与传统的Retinex算法增强相比,采用本文提出的Retinex算法进行增强后图像的信息熵更大,因此通过采用改进的Retinex算法进行图像增强,图像的细节更加丰富。
4 结 语
针对雾天图像增强中存在的细节优化问题,提出了基于亮度块分割的改进Retinex算法图像增强算法,采用背景亮度作为激励亮度值对图像的亮度块进行分割,然后采用不同尺度的增强因子对分割块进行增强,最后在对像素的边缘信息分割之后,按照一定的比例对块信息进行融合。仿真结果显示:与传统的Retinex算法相比,本文提出的基于亮度块的图像增强Retinex算法的信息熵较高,增强之后图像细节更丰富。
参考文献
[1] 赵宏宇,肖创柏,禹晶,等.基于WLS的Retinex单幅夜间彩色图像增强方法[J].北京工业大学学报,2014,40(3):404-410.
[2]储召辉,汪荣贵,方帅.基于Retinex理论的小波域雾天图像增强方法[J].计算机工程与应用,2011,47(15):175-179.
[3]王多超,王永国,董雪梅,等.贝叶斯框架下的单幅图像去污算法[J].计算机辅助设计与图形学学报,2010,22(10):1756-1761.
[4]罗会兰,林家彪.一种基于多尺度Retinex算法的图像去雾方法[J].计算机应用与软件,2013,30(4):58-60.
[5] Oakley JP, Satherley BL.Improving image quality in poor visibility conditions using a physical model for contrast degradation [J]. IEEE Transactions on Image Processing, 1998, 7(2): 167-179.
[6] NARASIMHAN SG, NAYAR SK.Contrast reato-ration of weather degraded images [J].IEEE Transactions on Patten Analysis and Machine Intelligence, 2003,25(6): 713-724.
[7] NARASIMHAN SG, NAYAR SK. Vision and the atmosphere[J].International Journal of Computer Vision, 2002, 48(3): 233-254.
[8] 陈志斌,张超,宋岩,等.灰度拉伸Retinex在大动态范围烟雾图像增强中的应用[J].红外与激光工程,2014,43(9):3146-3150.
[9] Land E H, McCann L J. Lightness and retinex theory[J].Journal of the Optical Society of American,1971,61(1):1-11.
[10]刘佳嘉,周超.一种基于色彩恒常理论的薄雾图像增强方法[J].科学技术与工程,2013,13(13):3774-3778.
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
航天返回与遥感(2022年2期)2022-05-12
燃气涡轮试验与研究(2021年6期)2021-08-01
海洋信息技术与应用(2020年4期)2021-01-18
中国生物医学工程学报(2019年5期)2019-07-16
测控技术(2018年3期)2018-11-25
电子测试(2017年12期)2017-12-18
北京航空航天大学学报(2017年3期)2017-11-23
雷达学报(2017年6期)2017-03-26
池州学院学报(2015年3期)2016-01-05