
RTLinux 中MUAV 机载计算机系统的设计方案
2016-01-09 14:16孙中廷
电脑知识与技术 2015年30期
孙中廷
摘要:微型无人机(MUAV)集计算机、电子、通信技术于一身,应用于多个领域。该文主要研究微型无人机机载计算机系统。基于系统的实时性要求,提出基于RTLinux的硬实时操作系统的MUAV硬件设计方案。分析多路传感器数据融合技术及MUAV飞行姿态解算的原理及算法。
关键词:MUAV;机载计算机系统;RTLinux;多传感器信息融合;姿态解算
中图分类号:TP212 文献标识码:A 文章编号:1009-3044(2015)30-0194-03
Design Scheme of Airborne Computer System for MUAV in RTLinux
SUN Zhong-ting
(Xuzhou Electromedchanical Engineering Department of Jiangsu United Vocational College, Xuzhou 221011,China)
Abstract: MUAV consisting of technology of computer, electronics and tele-communication is widely applied in various field. The paper mainly focus on analysis of an airborne computer system. Given the necessity of instantaneity, the hardware design of system based on RTLinux hard real-time operation system is proposed. Further, analysis of data fusion of multisensors and resolving of MUAV flying position is presented in paper.
Key words: MUAV; airborne computer system; RTLinux; data fusion of multisensors; position resolving
1 概述
无人机(UAV)是一种无人驾驶,具有自动导航、定位功能,并完成一系列飞行任务的飞行器。MUAV较UAV体积较小、质量轻,在多数领域发挥作用[1-2]。例如,凭借着其灵巧的机体结构,MUAV可以为意外事故的搜救和营救方面发挥作用;MUAV还可以实现对交通状况的检测,辅助工作人员完成相关任务。MUAV控制系统是MUAV能够完成其工作任务的核心,控制系统主要包括机载计算机系统和地面控制系统。MUAV需要按照规定的时序完成相应的动作,并且需要对外部环境的改变做出及时的调整[3]。
基于以上论述,嵌入式硬实时操作系统符合控制系统及时性、多任务的需要。 RTLinux是Linux的拓展。相比较Linux,RTLinux的硬件实时性能更加完善,内核稳定,运行速度快。较之普通的计算机系统,该操作系统可以专门执行特定的任务,实现操作任务的自动重复。RTLinux不仅在无人机领域发挥着重要作用,也在数控领域发挥其特性[4-6]。
2 系统设计
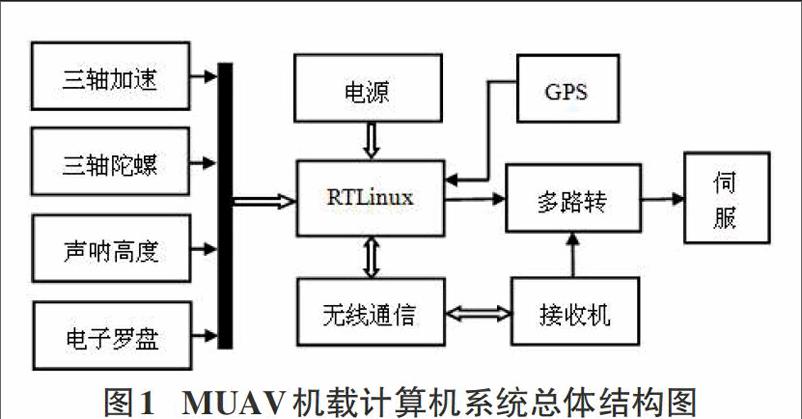
MUAV机载计算机系统的任务是采集MUAV的飞行姿态及位置信息、对采集的数据进行融合并根据算法进行处理。此外还有,控制飞行器的飞行姿态及路线、实现飞行器的起飞与着陆、与地面控制器实现数据通信[7]。系统任务将决定系统结构,MUAV机载计算机系统的结构如图1所示。
由图1可知,MUAV机载计算机系统主要由传感器、以RTLinux操作系统为核心的控制器、伺服舵机(执行机构)、通信部分组成。微型无人机在飞行时,控制器通过传感器获取无人机的飞行姿态以及位置,之后通过多传感器信息融合技术求解飞行器的飞行姿态,从而控制伺服舵机,实现MUAV的自主飞行。无线通信完成了机载计算机系统和地面控制基地的信息传递,进而完成地面导航及飞行姿态记录。伺服舵机既可以由RTLinux操作系统控制,又可以由地面控制器控制。系统通过多路转换通道完成其一方对伺服舵机的控制,增加MUAV控制系统整体的稳定性和可靠性。
MUAV机载计算机系统运算量庞大、系统复杂、任务多、实时性要求高,控制系可采用以RTLinux硬实时操作系统为核心的主控模块。PC-104主控板体积小、集成度高、功能齐全满足系统设计要求[8-9]。研华 PCM-4153 PC104 CPU模块具备:功耗低、系统频率可达800MHz、内涵看门狗程序、带有128M闪存和256N内存。并支持DDR内存、10M双网卡、RS-232 RS485/422及USB2.0协议等多种串口通信协议,可以实现PC104到PC104Plus的拓展、自带AC97声卡接口、具备24位的TFT LCD显示屏。PCM-4153 PC104处理速度高达800MHz,满足MUAV系统实时性较高的需求。PCM-4153 PC104的多种通信协议及通信接口满足系统三轴加速度传感器、陀螺仪、声呐高度计、电子罗盘和GPS等传感器的连接与信号传递[10]。因此,不论从系统处理速度上,还是功能拓展上,PCM-4153 PC104都是一款理想的RTLinux平台。
MUAV机载计算机系统的传感器有三轴加速度传感器、陀螺仪、声呐高度计、电子罗盘和GPS。三轴加速度传感器和陀螺仪完成MUAV加速度及角速度的测量。 LSM9DS0是美国Sparkfun公司研制的一种集三轴加速度、三轴陀螺仪、三轴磁力计为一体的传感器模块。该模块灵敏度高,可在125度的温度范围内完成测量,稳定性高,是一款符合系统设计要求的传感器模块。声呐高度计负责测量MUAV的高度信息,与三轴加速度传感器和陀螺仪一起完成机体的姿态以及高度的检测任务。GPS通过串口与控制器连接,实现对MUAV的坐标及速度的采集。由于GPS自身性能的不稳定,其只能提供粗略的坐标信息及速度信息,辅助其他传感器对MUAV坐标信息的采集。电子罗盘则实现MUAV的准确定位,用来弥补GPS的定位信息的误差。同时电子罗盘可以检测无人机的姿态,是理想的导航传感器和姿态传感器。
伺服舵机作为执行机构,根据控制器传来的控制信号旋转相应的角度。无人机上使用五个舵机,分别对应浆角总距输入、横向周期变距输入、纵向周期变距输入、尾舵浆角输入和风门输入。系统通信可采用Cisco Aironet 340的无线通信。该系列产品工作在2.4GHz,采用IEEE802.11b标准,允许4种比特率的数据传递速度,有较高的安全性和灵活性,可与PC104相连。此外,该系列无线接入点和无线工作组网桥不仅可以用控制台实现控制,还可以通过web对其实现控制,灵活方便。
3 多传感器信息融合
MUAV机载计算机系统集计算机、电子、通信技术于一身,是个学科交叉型的智能系统。MUAV飞行姿态的采集,坐标定位及导航需要三轴加速度传感器、陀螺仪、声呐高度计、电子罗盘、GPS等传感器的信息融合与解算。因此,多传感器信息融合技术是MUAV系统能够飞行并完成指定任务的基础。
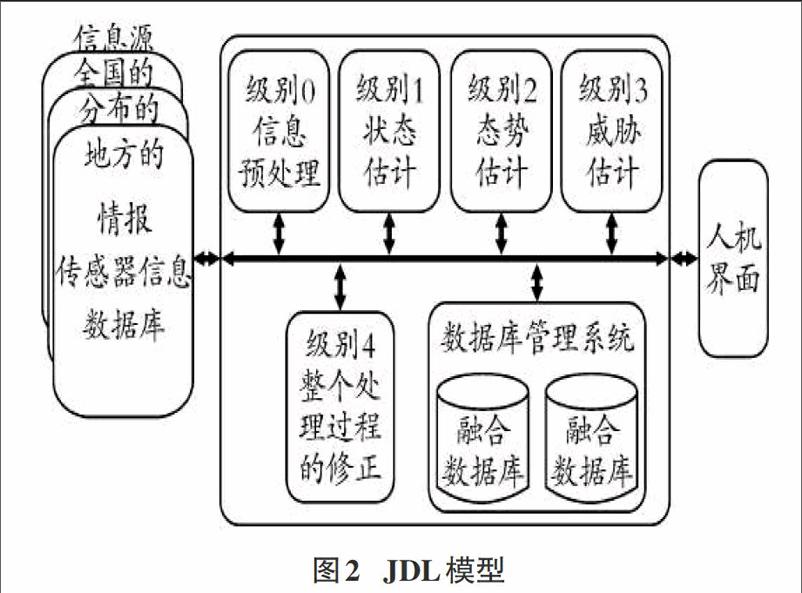
传感器信息融合是一个推理和决策的过程。Waltz定义该技术为:对多传感器提供的数据或信息进行关联,得到优于单一传感器信息的推理和身份估计。Wald将其定义为:联合来自不同信息源数据的处理方式的基本框架,其目的是优化信息的质量。总之,多传感器融合是将多个传感器收集来的大量数据进行压缩、分类、分析,提取有用信息进行融合,从而获取所需的数据和状态。多传感器融合的概念首先在美国军事领域提出,并由国防部构建了JDL模型。模型结构图如图2所示。
该模型包含四个阶段:预处理、状态估计、态势估计和威胁估计。模型首先整合全国各地的传感器信息,将其中的特征信息进行提取,提取方式有标准化、归一化、压缩等。其次,进一步处理传感器信息,明确个体的身份及状态。根据一定方法,对数据进行估计,判断其个体是敌是友。最后对分类信息进行类似于神经网络学习的自修正,以完善威胁估计的准确度。JDL模型使多传感器信息融合的原理更加清晰明了,为之后技术的拓展做铺垫。
多传感器信息融合重点在于数据的处理与重组。它的原理及步骤是:首先,收集多个传感器的数据。对于MUAV来说,即通过RTLinux平台,采集三轴加速度传感器、陀螺仪、声呐高度计、电子罗盘和GPS的数据。其次,提取传感器收集到数据的特征向量,并判定其状态。判定方法有聚类分析、向量机、判别分析等。关联每个传感器经过处理后的特征向量,并用融合算法获得对目标的综合评述。对于MUAV来说,即完成其姿态解算,及位置信息的获取任务。
多传感器信息融合可分为三个层次:数据层、特征层、决策层。数据层不对传感器采集的信息进行任何处理,直接对大量数据做融合处理,之后进行特征向量的提取及判别分析。特征层将提取采集数据的特征向量,并对其实现融合,最后做分析判断。决策层将对数据处理的整体结果做融合。数据层的融合信息保留程度最全面,但是数据量限制了整个融合判定的速度,为处理器带来负担,影响系统整体的实时性要求。特征层的融合相对数据的处理量较小,但存在数据信息的缺失现象。决策层的融合,处理速度快,系统响应时间短,但有用信息遗失较为严重,一定程度上造成目标分析的失真。
对于MUAV机载计算机系统多传感器信息融合的部分而言,融合层次结构及融合算法将决定信息处理的响应速度。常用的信息融合算法有贝叶斯准则、证据理论、模糊集理论、神经网络等。贝叶斯准则是基于先验概率的一种数学方法。证据理论侧重于对不确定模型的构建及推理。模糊理论是基于分类的估计。神经网络模拟人体神经系统的工作过程,可以完成对对象的分类及自我修正。不同算法适用于不同的系统,系统选择不同的层次及结构也会导致算法的运行效率及最终结果的准确程度。因此,MUAV机载计算机系统需要灵活的设计信息融合部分的结构、层次及算法,以保证一定的系统响应速度及实时性。
4 姿态解算
MUAV的姿态解算是MUAV控制系统的核心部分。MUAV姿态角需要实时检测并且及时调整。控制器通过MUAV的飞行姿态确定下一步的控制方式,保证飞行的连续性,并完成指定任务。MUAV飞行姿态解算本质是将机载传感器采集到的机体坐标系内加速度和角速度转换到以大地为静止坐标系的空间内,并从中求解飞行器三个姿态角。设以机体为坐标系的角速度为[xp],[yp],[zp]以大地为坐标系的角速度为[xo],[yo],[zo]。机体和大地坐标系之间的转换关系为捷联矩阵T。则
[xoyozo=Txpypzp] (1)
矩阵T则由MUAV的姿态角(俯仰角[θ]、倾斜角[γ]、偏航角[φ])的三角函数组成。
MUAV俯仰角[θ]、倾斜角[γ]、偏航角[φ]与不同参考系内的角速度的关系可以简单理解为坐标旋转。即机体坐标系的xyz轴依次按照俯仰角[θ]、倾斜角[γ]、偏航角[φ]旋转,则可以得到地面坐标系xyz以及对应角速度。由数学推导可得
[T=cosγcosφ-sinγsinθsinφ cosγsinφ+sinγsinθcosφ -sinγcosθ -cosθsinφ cosθcosφ sinθsinγcosφ+cosγsinθsinφ sinγsinφ-cosγsinθcosφ cosγcosθ](2)
设[T=t11 t12 t11t21 t22 t23t31 t32 t33]
则
俯仰角[θ]=[sin-1t23] (3)
偏航角[φ]=[cos-1t22cosθ] (4)
倾斜角[γ]=[cos-1t33cosθ] (5)
因此,通过矩阵T可求解出飞行器的三个姿态角,并且实现两个坐标系的转换。
矩阵T有多种求解方法。较常用的算法有欧拉法、四元数法和方向余弦法。欧拉法基于三角函数的原理,经由三个方程求解矩阵元素。四元数法基于理论力学的思想,引入变量“转动四元数”从而避开欧拉法复杂的三角方程求解,并由四个微分方程得到矩阵元素。方向余弦法需要求解更多方程个数,但方程复杂程度也远低于欧拉法。
5 结束语
MUAV机载计算机系统是一个实时性要求非常高、运算量庞大、功能复杂的系统。本文主要研究以RTLinux为核心的机载计算机系统,提出了基于RTLinux的硬实时操作系统的硬件设计方案,分析多路传感器数据融合技术及MUAV飞行姿态解算算法。
参考文献:
[1] 王琪, 黄毅, 李利翔. 某中近程小型UAV飞行控制系统硬件平台设计[J]. 世界产品与技术, 2013(4):47-50.
[2] 邵玮, 祝小平, 周洲,等. 改进的UPF方法及其在MUAV组合导航中的应用[J]. 飞行力学, 2013(31).
[3] 王凤朝, 黄树采, 韩朝超. 多传感器信息融合及其新技术研究[J]. 航空计算技术, 2009, 39(1):102-106.
[4] 王日俊, 白越, 续志军,等. 基于扰动观测器的机载云台扰动复合补偿方法[J]. 光电子·激光, 2015(1).
[5] 陈国, 边庆, 范超. 一种新型无人机小型化飞行器管理计算机的设计实现[J]. 电子技术与软件工程, 2014(14)0185-186.
[6] 邵玮, 祝小平, 周洲,等.改进的UPF方法及其在MUAV组合导航中的应用[J]. 飞行力学, 2013(31).
[7] 罗泽勇. 一种小型无人机的机载计算机软件系统设计[J]. 东北师大学报:自然科学版, 2015,47(1):64-70.
[8] 王晶东,于化东,李妍.小型无人机载光电稳定平台框架结构研究[J].机械科学与技术,2014(10).
[9] Zhang W, Wan W. Research and Application of Data Fusion Technology in Smart Manager & Control Platform in Sub-station[J]. Electrical Engineering, 2014,15(2):48-52.
[10] Liang Z D, Hua-Ying L I, Guan J. The Research of MUAV SINS/GPS Integrated Navigation System[J]. Science Technology & Engineering, 2013.
