多灰度级格雷码三维测量方法
2016-01-19 11:48孟凡辰陈德运王莉莉于双于
哈尔滨理工大学学报 2015年5期
孟凡辰++陈德运++王莉莉++于双++于晓洋


摘要:针对两灰度级格雷码三维测量方法存在编码图案多、测量效率低的问题,研究多灰度级格雷码的三维测量方法,与两灰度级格雷码方法相比,该方法采用多个灰度级形成编码图案,同等条件下能有效减少编码图案数量、明显提高测量效率.通过m幅Ⅳ(N∈Z,N≥3)灰度级格雷码图案将被测空间分为Nm个区域,编码图案中的条纹平行、宽度相同.根据格雷码编码图像将,v灰度级格雷码转换为Ⅳ进制数,进而转化为十进制数,从而得到编码图像中每个像素点在编码图案中所对应的区域序号,并结合光学三角法的数学模型得到被测表面的三维坐标,实验结果表明,该方法对深度距离为850~1150mm平面的方差小于2 mm2,测量误差小于2mm,最大绝对误差小于5mm,该方法适用于具有复杂和不连续表面的被测对象,测量结果能较好地体现被测表面的细节特征,
关键词:三维测量;结构光;两灰度级格雷码;多灰度级格雷码;格雷码多值化
DOI: 10.15938/j.jhust.2015.05.019
中图分类号:TP391
文献标志码:A
文章编号:1007-2683(2015)05-0097-06
0 引言
视觉三维测量技术是三维测量领域的重点发展方向,其中结构光法作为一种主动式三维测量方法具有成本低、分辨率高和速度快的优势并最具实用性.时间编码结构光三维测量方法具有高准确度、高分辨率等优点,具有广阔的应用前景,目前,时间编码主要分为数字时间编码和模拟时间编码两类,数字时间编码与模拟时间编码相比,测量准确率较低,但其抗干扰能力较强.数字时间编码主要分为两灰度级码和两灰度级格雷码,传统的数字时间编码结构光需要一定数量的编码图案才能达到较高的测量准确度和采样密度,本文针对被测物处于静态的场合,研究编码图案较少的多灰度级格雷码三维测量方法,该方法与两灰度级格雷码方法相比,保留了高抗干扰能力的优点,同等条件下减少了编码图案的数量,明显提高了测量效率.
1 三维测量系统组成及测量原理
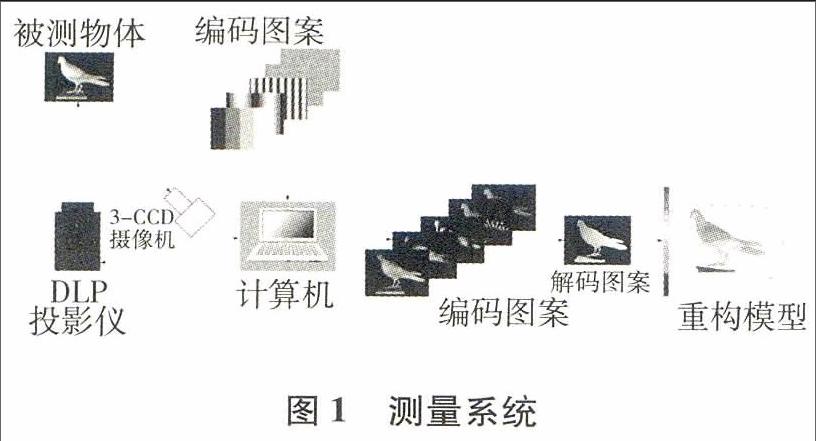
基于本文方法的三维测量系统如图1所示,主要由投影仪、数码摄像机及计算机组成.通过计算机生成编码图案并控制投影仪依次将编码图案投射到被测物表面上;投射在被测物表面上的编码图案受其表面形状调制而改变;计算机控制数码摄像机采集编码图像并进行解码,然后根据摄像机和投影仪之间的位置姿态参数并通过光学三角法获得被测表面的三维信息,
三维测量系统的测量原理如图2所示.图2中,0为投影仪的镜头中心,M为摄像机镜头中心,基线OM=B;P为被测表面上的一点,其位于物理坐标系XYZO内,点P0为物点P在像坐标系X0Z0Y0O0中的像平面X0Z0Y0内的像点,面XOZ共面,光线OP在XOZ面上投影OP'与OX轴的夹角为a,称之为投射角,点P'为物点P在XOZ面上的投影点,摄像机镜头光轴X0Z0与基线OM之间的夹角为Po,摄像机的镜头焦距OoM=f,光线MP与XOZ面的夹角为γ,β卢为光线MP在XOZ面上的投影MP'与基线OM之间的夹角,点p'0为像点P0在光轴O0X0上的投影点.摄像机在水平方向的视场角为2β1,在垂直方向的视场角为2β2,摄像机像面水平方向Xo上的像素序号记为n,总像素数为2N,摄像机像面在垂直方向Y0上的像素序号记为m,总像素数为2M.
根据光学三角法,由图2可推导出被测点P的三维坐标计算公式为式中:P0、β1、β2、B为预先标定的常数;n、m、N、M由编码图像直接得到;投射角a需要根据编码图像进行解码获得.
2 多灰度级格雷码的编解码原理
多灰度级格雷码在两灰度级格雷码的基础上,通过增加灰度级数量来进行编码从而减少投射图案的数量,提高编码效率.该方法通过m幅Ⅳ(NEZ,N≥3)灰度级格雷码图案将被测空间分为NM个区域,编码图案中的条纹平行、宽度相同,下面以四灰度级五位格雷码为例说明多灰度级格雷码条纹编解码原理,由投影仪向被测表面按时序投射如图3所示的5幅编码图案,通过亮、浅灰、深灰、暗四灰度级将被测空间分为45=1024个区域.其中亮区域对应码值3,浅灰区域对应码值2,深灰区域对应码值1,暗区域对应码值0,0、1、2、3所对应的灰度值分别为0、85、170、255.四灰度级五位格雷码的编码规则如图4所示.解码时,将编码图像上的某个像素点作与其空间被测点相对应;将该像素点中心作为图像采样点位置,该像素点在5幅编码图像中的码值按时间序列组合,得到该像素点的区域编码值,由此确定该像素点在编码图案上的所在区域,进而建立空间被测点、编码图像像点和编码图案像点的对应关系.
图4 四灰度级五位格雷码编码规则
图3中某个空间被测点P对应于编码图像上的红色像素点,在5幅编码图像中的码值分别为“0”、“0”、“0”、“0”、“0”、“3”,则该点的区域编码值为“00003”,首先将格雷码转换为四进制码“00003”,进而转换为十进制码,得到该像素点的区域序号k=3,K为整数.
多灰度级格雷码属于一种Ⅳ进制码,任意两相邻码值之间只有1位不同,反映到解码过程中,即任意图像采样点在各幅编码图像中最多只有一次处于条纹边缘,因此其码值最多只有1位被误判,在解码过程中需通过式(2)将多灰度级格雷码转换成Ⅳ进制码,其中G'=G'1.G'2 G'3 -G'm表示Ⅳ灰度级格雷编码;B'=B'1,B'2,B'3- - - B'm表示其对应的Ⅳ进制编码.根据式(3)将获得的Ⅳ进制码转换为十进制码,即采样点在编码图案中所对应的区域序号k.
若要将被测空间分为1024个区域,采用两灰度级格雷码需要10幅编码图案,而采用四灰度级格雷码需要5幅编码图案,相对于两灰度级格雷码,多灰度级格雷码减少了编码图案幅数.m幅N灰度级格雷码编码图案可将被测空间分为Nm(N∈Z,N≥3)个区域,m幅两灰度级格雷码编码图案可将被测空间分为2m个区域,Nm>2m,因此,在编码图案相同的情况下,相对于两灰度级格雷码,多灰度级格雷码具有较高的测量分辨率.
3 投射角的求取
准确获得投射角α是光学三角法的关键,即将多灰度级格雷码解码值转换为对应的投射角,投影仪的投射中线与光轴OX的夹角为α0,投影仪的水平视场角为2α1,m幅多灰度级格雷码编码图案用N灰度级将投射空间划分为,Nm个区域,格雷码空间范围为[0,Nm0-α1,α0+α1).图5为四灰度级两位格雷码解码值与投射角的转换关系,两幅编码图案用四灰度将投射空间划分为42=16个区域,格雷码空间范围为[0,15].式为多灰度级格雷码解码值所对应的投射角求取公式中:Ⅳ为格雷码的灰度级数;m为格雷码编码图案的数量;k为格雷码解码值.根据式(6)可得四灰度级五位格雷码解码值所对应的投射角求取公式为
4 多灰度级格雷码多值化
4.1 格雷码编码图像归一化
结构光测量系统投射的编码图案和拍摄的编码图像只包含灰度信息,复杂的测量环境,被测表面的反射率不均匀,环境光对被测表面的照射不均匀以及被测表面形状的不规则等因素都对会所拍摄的编码图像中各像素的灰度值进行调制,致使各像素的灰度值的变化范围不一致,因此,在对编码图像进行多值化之前,需要对编码图像进行归一化来减小外部因素对编码图像中各像素的灰度值的调制影响,
下面以四灰度级格雷码为例对编码图像归一化进行说明,在投射四灰度级格雷码编码图案的基础上,再附加投射“全亮”、“浅灰”、“深灰”、“全暗”4幅图案,“全亮”即编码图案中各像素点为白色(灰度值为255);“浅灰”即编码图案中各像素点为浅灰色(灰度值为170),“深灰”即编码图案中各像素点为深灰色(灰度值为85),“全暗”即编码图案中各像素点为黑色(灰度值为0).利用式(8)对四灰度级格雷码编码图像进行归一化来修正外界因素对编码图像中各像素的灰度值的影响,即
式中:IK(i,j)、IH(i,j)、IL(i,j)分别为格雷码编码图像、“全亮”、“全暗”图像中像素点(i,j)的灰度值;Jk(i,j)为格雷码编码图像归一化后像素点(i,j)的强度值,Jk(i,j)在[0,1]范围内变化,
除了对格雷码编码图像进行归一化之外,还需要通过式(9)对“浅灰”、“深灰”图案进行归一化,即式中:IM1(i,j)、IM2(i,j)分别为“深灰”、“浅灰”图像中像素点(i,j)的灰度值;J'M(i,j)、J"M(i,j)分别为“深灰”、“浅灰”图像归一化后像素点(i,j)的强度值,J'M(i,j)、J"M(i,j)均在[0,1]范围内变化,且J'M(i,j)
4.2 格雷码编码图像多值化阈值的选取
编码图像多值化是在将归一化图像转换成多值图像,N灰度级格雷码编码图像需要N-1个阈值来进行多值化.下面以四灰度级格雷码为例对编码图像多值化进行说明,编码图像四值化是在将归一化图像转换成暗、深灰、浅灰、亮四值图像.格雷码编码图像四值化采用局部阈值法,即将“深灰”图像归一化后的像素点的强度值与零取平均作为该像素点的阈值1,将“深灰”、“浅灰”2幅图像归一化后的同一像素点的强度值取平均作为该像素点的阈值2,将“浅灰”图像归一化后的像素点的强度值与1取平均作为该像素点的阈值3,根据式(10)对编码图像进行四值化,即
5 测量实验与结果分析
m幅多灰度级格雷码编码图案用Ⅳ灰度级将投射空间划分为nm个区域,当nm为固定值时,多灰度级格雷码的灰度级数Ⅳ越大,编码图案数量m越小,同时,随着多灰度级格雷码的灰度级数越多,抗干扰能力越低;对编码图像进行解码时图像采样点灰度级判断次数增多、判断难度增大,易带来解码误差,影响测量准确度.综合考虑,本文采用四灰度级五位格雷码进行实验.
测量系统实验装置由DLP投影仪(AcerH7531D)、3-CCD摄像机(HITACHI HV-F22)以及计算机组成,实验中,投影仪水平视场角2a,设置为40°,编码图案的分辨率设置为1024×768摄像机的水平视场角2β1和垂直视场角2β2分别设置为40°和30.651°,摄像机的镜头焦距f设置为49.455mm,摄像机的分辨率设置为1360x1024,投影仪的镜头中心与摄像机镜头中心之间的距离B设置为400mm,摄像机镜头光轴与X轴之间的夹角Po设置为70°.
本文针对尺寸为200×300mm2的标准平面进行测量实验,将标准平面垂直于深度方向放置于一维移动台上,一维移动台沿深度方向从850mm位置处开始依次移动75mm直到1150mm位置处,每个位置处进行一次测量,标准平面测量结果如表1所示,,其中,标准深度值为标准平面的深度值,平均测量值为被测平面上所有采样点的深度测量值的平均值,平均测量误差为平均测量值与其标准深度之差,方差为被测平面上所有采样点的深度测量值与其测量平均值差值的平方和的均值,测量误差为平均测量误差平方与其方差之和的平方根,最大绝对误差为所有采样点的深度测量值与平均测量值之差的绝对值的最大值.图6为采用四灰度级格雷码测量方法的深度值为1000mm的标准平面的每个采样点的深度测量值与其标准深度的差.
由表l及图6可知,在850~1150mm深度测量范围内,采用四灰度级五位格雷码测量标准平面的方差小于2.5mm2,测量误差小于2mm,最大绝对误差小于5mm该方法不存在粗大误差
为了进一步验证本文方法,采用四灰度级五位格雷码对表面复杂的花瓶进行了测量实验,图7(a)为被测花瓶,图7(b)为投射了四灰度级格雷码编码图案的图像,图7(c)为被测花瓶的测量结果.
通过对比图7(a)和图7(c)可知,根据测量结果重构的花瓶的三维表面光滑、细腻,准确地反映r被测表面的三维形貌,较好地体现了被测表面的细节特征,具有良好的视觉效果.实验结果验证了本文方法的有效性和可行性.
6 结论
本文研究了多灰度级格雷码三维测量方法,组建了测量系统,阐述了该方法的编解码原理,陔方法与两灰度级格雷码三维测量方法相比,在相同测量分辨率的情况下,采用多个灰度级形成编码图案,有效减少了编码图案的数量,明显提高了测量效率,针对多灰度级格雷码解码时的多值化问题,给出了多灰度级格雷码多值化的方法.采用四灰度级五位格雷码对标准平面和表面复杂的花瓶进行了测量实验,实验结果表明,对深度距离为850~1150mm标准平面的方差小于2mm2,测量误差小于2mm,最大绝对误差小于5mm,对表面复杂的花瓶的测量结果较好地体现了被测表面的细节特征,验证了本文方法的有效性和可行性.需要值得注意的是,当格雷码的灰度级数Ⅳ较大时,该方法的抗干扰能力降低,对编码图像进行解码时图像采样点灰度级判断次数增多、判断难度增大,易带来解码误差,影响测量准确度.如果该问题发生时,可以应用更好的硬件系统来解决此问题,