
美国航母仪表着舰系统和微波着陆(舰)系统研究
2016-01-23 18:53龚朝辉海军装备部装备采购中心北京100071
雷达与对抗 2015年1期
龚朝辉(海军装备部装备采购中心,北京100071)
美国航母仪表着舰系统和微波着陆(舰)系统研究
龚朝辉
(海军装备部装备采购中心,北京100071)
摘要:概述了仪表着舰(陆)系统的发展情况,着重分析了美国AN/SPN-41仪表着舰系统和微波着陆(舰)系统的工作原理、系统组成和性能以及两个系统的主要区别和特点。
关键词:航母;仪表;微波;着舰
0 引言
目前,世界上飞机着舰(陆)引导设备有雷达着舰系统(GCA)、仪表着舰系统(ILS)、微波着陆(舰)系统(MLS)和差分全球卫星定位系统(DGPS)4类设备。这其中AN/SPN-42和46(V)雷达着舰系统、AN/SPN-41仪表着舰系统及差分全球卫星定位系统均已在美国航母上得到成功应用。
仪表着舰系统和微波着陆(舰)系统的工作原理基本相同。它是利用微波波束扫描技术,在空中由飞机上的接收机/译码器从舰面发射的连续扫描波束中推导出飞机在空间的角度位置数据,并由飞机上的询问器测量舰面应答脉冲延迟时间的方法导出距离数据,因而称为空中导出数据系统。而在雷达着舰系统中,着舰飞机的角度和距离数据直接由舰面上的精密跟踪雷达测量而导出的,所以称为舰面导出数据系统。由此可见,仪表和微波着舰(陆)系统与雷达着舰系统的工作原理、系统组成和特点显然不同。本文重点介绍和分析仪表着舰系统和微波着陆(舰)系统。
仪表着陆系统起源于1929年采用的双信标着陆系统,1949年被国际民航组织正式确定为标准的国际民航着陆系统。20世纪70年代中期,根据航母飞机着舰引导的需求,美国研发了航母仪表着舰系统,并一直沿用至今,即美国现役的航母均装备了该系统。随着电子技术及微波着陆需求的提高,仪表着陆系统后来演变为微波着陆系统,1978年4月国际民航组织又选定微波着陆系统为新一代国际标准着陆系统。20世纪90年代中期随着GPS系统的发展和推广应用,美国成功研发了差分全球卫星定位系统(DGPS)并开始应用于航母上。由于美国选用了DGPS系统,因此微波着陆(舰)系统尚未在航母上得到应用,正处于开发研究阶段。目前,仍使用仪表着舰系统[1-2]。
1 AN/SPN-41仪表着统
AN/SPN-41仪表着舰系统使用了类似微波扫描技术,可在20 km的工作范围内给飞机提供引导信息。20世纪70年代初配装于美国航母。该系统也应用于雷达自动着舰系统中引导驾驶员到AN/SPN-42雷达的捕获窗口。如果SPN-42雷达着舰系统出现故障,SPN-41系统也可用于半自动进近。AN/SPN-41仪表着舰系统主要由两部独立的发射机及天线组成,其中一部为方位角数据发射机及其天线,另一部为仰角数据发射机及其天线。方位发射机及其天线位于母舰甲板尾端下面,备有稳定装置以防横摇和偏航。仰角发射机及其天线位于母舰甲板跑道一侧光学着舰系统后面约100 ft,也有防横摇和升沉的稳定装置。
两部天线都是采用机械扫描方式工作,方位天线产生一个2°的波束,在着舰甲板跑道中线±10°范围内扫描。仰角天线产生1.3°的波束,在水平面上0°~10°范围内扫描。发射机通过天线向空中发射一双编码脉冲,脉冲对的间隔用于区分方位、仰角以及方位角的正负。连续的两个脉冲对之间的间隔按方位角或仰角角度编码。向母舰进近的飞机上装有AN/ARN-63接收机/译码器,它所接收的微波信号上调制有脉冲对,角度数据含在其中。译码器对脉冲进行译码,产生的角度偏差数据在飞机的双针指示器上显示出来,为飞机着舰提供引导数据。
仰角天线仅在水平面上0°~10°的范围内发射,但实际扫描通过20°圆弧(水平面上15°和水平面下5°)。同样,方位天线也仅在30°扫描的中间20°时发射(跑道中心线每边15°)。再次扫描末端的“停滞时间”允许天线倒置回扫行程的方向。但是,每个天线仅在一个扫描方向辐射。这样,通过分开天线异相的180°,一个天线将在另一个天线返扫时辐射并且所有信号发射通过一个无线电信道。然后,机载设备上的角度译码器在方位和仰角信号间分时,每次方位角和仰角的单个存储器更新,接收到并译码一个合适的波束。
方位和仰角扫描波束在航母舰尾20 km处形成一个大约7 km宽、3.5 km高的SPN-41系统的捕获窗口。一旦进近飞机通过这个窗口,它就捕获目标并将飞机引入SPN-42雷达的波束中。为了安全起见,作为一种理想方式,当SPN-41将飞机引入SPN-42雷达窗口时,也同时引入菲涅尔透镜光学着舰系统范围内。每次扫描波束掠过进近飞机时,飞机上的设备接收并处理编码信号,提供数据给仪表显示。因为每个波束每秒完成3.3次扫描,则飞机可以连续接收这个飞行路线,使飞机返航时保持进近路径的正确方向。因为引导信息直接发送到飞机上使用,所以不需要数据链和航母的话音通信,这样就可以减轻飞行员、航母空中交通管制中心已经很繁忙的通信信道的工作量。AN/SPN-41仪表着舰系统的主要性能指标如下:
·作用距离:40 km(有报导为93km)
·工作频率:15412~15688 MHz(含10个频率)
·峰值功率:2.2 kW,发射形式:脉冲位置调制
·天线形式:方位角天线为抛物面反射体仰角天线为抛物柱面反射体
·波束宽度:方位天线:水平2°,垂直10°仰角天线:水平40°,垂直1.3°
2 微波着陆(舰)系统
微波着陆(舰)系统是在仪表着舰系统基础上发展的新型着陆(舰)系统,是利用“往”、“返”扫描波束到达的时间差来进行角度计算的。由于系统工作在微波频段,又采用了波束扫描技术,因此该系统称为时间基准波束扫描微波扫描着陆系统,通常称为微波着陆(舰)系统[3]。
2.1系统组成及功能
微波着陆(舰)系统主要包括地面(舰面)设备和机载设备。地(舰)面设备主要包括方位引导设备、仰角引导设备以及精密测距设备。机载设备主要由接收机、精密测距设备和天线组成,其中方位引导设备主要由扫描天线、数据天线、发射机、系统接口单元、天线稳定装置以及控制机柜等组成。仰角引导设备在组成上除天线(含稳定装置)不同外,其余均在硬件上可以做到与方位引导设备互换。
方位和仰角扫描天线均采用相控阵(电子扫描)天线,其基本单元由辐射阵元、功率分配器和移相器以及监测装置组成。方位和仰角天线均安装在稳定平台上,以保证在航母纵横摇时方位和仰角天线在规定的范围内稳定扫描。方位天线发射一个水平面窄、垂直面宽的扇形波束,仰角天线发射一个水平面宽、垂直面窄的扇形波束。方位数据天线和仰角数据天线在功能、性能以及安装形式等方面都是相同的,即在方位天线辐射阵面左右各再增加一个辐射纵列单元实行数据天线的功能。它的水平面覆盖可达到±20°,垂直面方向图是余割平方,主要用来向覆盖区内播发方位/仰角前导码、基本数据字和辅助数据字等数据信息。
发射机主要由频率合成器、DPSK调制/解调器、功率放大器及电源组成,可工作在工作频段内波道中的任何一个波道上。精密测距设备主要由发射机、接收机、天线及控制与监测单元组成,工作在962~1213 MHz频段。它与机载设备采用询问和应答方式,为着舰飞机提供距离信息。
微波着陆系统工作在5 GHz频段,作用距离为40 km,方位和仰角的测角精度为±0.06°,方位角覆盖范围为80°,仰角覆盖范围为15°。
2.2系统基本工作原理
系统工作时,方位引导设备提供飞机进场方位和基本数据;仰角引导设备提供仰角引导信息,其信号在时间上与方位引导设备同步,保证分时工作时序;精密测距设备提供连续的距离信息。方位引导设备向指定方位±40°范围的空域发送方位扫描波束;仰角引导设备向该空域-1°~15°范围发送仰角扫描波束。机载接收处理器单元接收每一个信号,并结合地面发送来的基本数据、辅助数据和距离信息,基于“往”、“返”扫描波束到达的时间差,计算出方位角和仰角以求得飞机相对跑道中心线某点的位置。由于飞机进场的数据由机上导出的,所以亦称为“机上导出数据”系统。
微波着陆(舰)系统的测角原理如图1所示。由此图可导出测角的基本计算公式为

式中,T0为零度时间的往返扫描脉冲的时间间隔(单位为μs),V为天线波束扫描速度(单位为°/μs)。上述参数中,T0为常数,V为已知数(设计指标)。由此可见,只要测量出往返扫描脉冲时间差t,即可求解出θ值(角度值)。
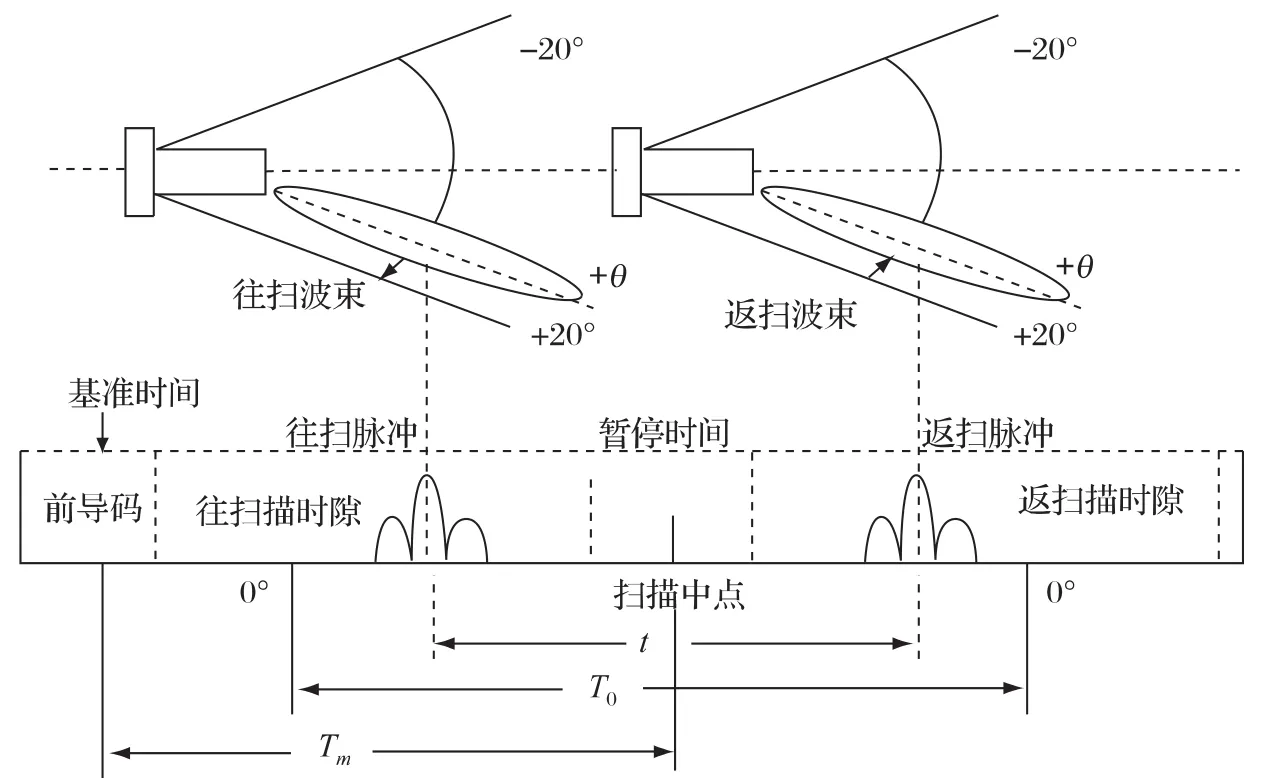
图1 微波着陆(舰)系统的测角原理
微波着(舰)陆系统采用时间基准扫描波束信号格式,利用时分多路传输特点,对一个功能(仰角、方位、反方位、数据等)提供一个独立的时间间隔,并在C频段同一频率上发送。在信号格式的前导码中,设置相应的功能识别码,以告诉接收机后续信息的类型。前导码发向指定的覆盖区,包括一段未被调制的射频载波捕获周期,接收同步码(巴克码)和功能识别码。接收机检测同步码和功能识别码来设置电路,正确处理其后的信息。角度功能时,其后的信息是提供接收机计算方位角和仰角的高方向性的连续扫描的扇形波束;数据功能时,其后的信息是用差分相移键控方式调制的数字信息流。以此描述特定的微波着舰设备或进场程序。当一个功能处理完毕,接收机就等待下一个前导码,加以重复进行。
微波系统数据又分为基本数据和辅助数据两种。基本数据功能为机载系统的基本角度处理过程提供用于直线进场所需的微波着陆系统比例覆盖范围、最低下滑道、天线波束宽度、天线位置及其他项目等数据。辅助数据功能为机载系统和机组人员提供执行高级进场程序所需的数据,如跑道状态、气象及其他补充信息等,它又具有数字和字符两种形式。
2.3微波着陆系统上舰需解决的关键技术
针对航母的特点,微波着陆系统上舰应用于航母着舰系统时,需首先解决微波系统集中配置、天线小型化、母舰运动的补偿等关键技术。
2.3.1集中配置技术
由于航母甲板狭窄,因此不可能像陆地机场那样采用分散配置方位、仰角引导设备和测距台,必须将这些设备集中配置在甲板跑道的一侧。采用集中配置会带来两个问题:一是坐标变换问题,二是集中配置引入的误差问题。
坐标转换能解决将飞机相对于方位天线相位中心的方位角,相对于仰角天线的仰角和相对于测距天线相位中心的斜距换算到相对于着舰点的方位角、仰角和斜距问题。坐标转换技术的核心是找到一种算法建立数学模型,并进行仿真计算,以保证算法的精度和在全覆盖范围内的快速收敛性。集中配置时方位、仰角和测距天线的位置数据的精度对微波着舰系统的精度会带来影响,则需研究配置位置的误差和传送位置的方法给系统带来的影响。
2.3.2天线小型化技术
微波着陆系统的天线上一维相扫的相控阵天线,陆上采用的方位和仰角天线由60单元组成。尺寸分别是2 m和4 m。当该系统应用于航母飞机着舰时,由于航母空间尺寸的限制,要求尽可能缩小天线尺寸,以求安装和选址的方便。但是,天线口径尺寸的缩小会引起系统性能(主要是测量精度)的降低。因此,需要进行专题研究,在确保微波着舰系统性能满足航母着舰要求的前提下进行天线小型化设计,以满足安装要求。
2.3.3航母运动补偿技术
相对飞机着陆而言,飞机着舰的最大区别在于飞机将降落在运动平台上。由于航母甲板在飞机着舰的过程中是不停地运动,因此微波着舰系统的方位和仰角也随之产生侧倾、俯仰、偏离的运动,同时天线的相位中心随着甲板运动面产生位移。由此可见,航母甲板的运动给微波着舰系统带来了附加的方位和仰角误差。根据计算机仿真计算分析,母舰横摇将产生方位误差±0.18°,仰角误差±0.1°;母舰纵摇将产生仰角误差±1.0°(纵摇不会产生方位的附加误差),此误差值将引起微波着舰系统的总误差值超出着舰引导精度要求。为了消除航母甲板运动对着舰精度的影响,目前最直接和方便的方法就是采用天线稳定装置。天线稳定装置可采用两轴机械稳定平台,它是根据敏感的船体摇摆角速度信号、角信号对船摇进行有效隔离,保证方位、俯仰扫描天线安装位置水平。两轴稳定平台采用的直接驱动和角位置测量技术,减去了驱动齿轮链和角度测量齿轮链,消除了机械回差,保证了伺服系统低速平稳和高精度性能。
3 仪表着舰系统与微波着陆(舰)系统的主要区别及特点
仪表着舰系统与微波着陆(舰)系统基本工作原理相同,均是机上导出数据系统,即飞行员根据机上导出的数据自主控制飞机着舰。两个系统的主要区别为:仪表着舰系统是采用机械扫描天线技术,而微波扫描系统则采用了电子扫描天线技术;仪表系统是舰面直接发送角度编码脉冲,飞机上译码导出角度数据。而微波系统是利用“往”、“返”扫描波束到达的时间差,由机上导出角度数据;仪表系统工作频率为15412 ~15688 MHz(Ku波段),而微波系统工作频率为5031 ~5090 MHz(C波段)。
仪表着舰系统的特点是着舰精度较高,设备简单成本低;其缺点是对机场安装地敏感,覆盖区狭窄,仅能提供单一的直线进场引导,易受调频广播干扰。该系统的典型代表为美国的AN/SPN-41仪表着舰系统,目前已大量装备美国航母。微波着陆(舰)系统的特点是引导容量大、精度高,并可实行计算中心进场、折线进场和曲线进场;其缺点是设备量大,安装场地要求严。该系统已在陆地机杨上得到广泛应用,但目前美国航母上还尚未装备,正处于研究开发阶段。
4 结束语
飞机着舰是一个紧张、复杂、危险大的高风险过程。为了确保飞机安全着舰,航母着舰系统应同时实现飞机上主动和舰面监视控制两大功能,即飞行员利用仪表或微波着舰系统,在飞机进近的过程中做到飞行员主动掌握飞机偏离标准下滑线的情况,自主地操纵飞机到正确下滑路径上来;同时,舰面引导官利用雷达着舰系统,及时掌握飞机的位置、偏差和姿态以及着舰速度,以便指挥飞行员减少失误,并最终决断是否放弃着舰、拉起复飞。由于仪表或微波着舰系统与雷达着舰系统的联合使用,既能实行机上主动又能保证舰面主动指挥引导,则大大提高了飞机着舰的可靠性和安全性,因此两种着舰系统的联合使用为发展航母着舰系统提供了值得借鉴的良好技术途径。
参考文献:
[1]郑德芳.航空母舰舰载机着舰文集[C].西安:中国电子科技集团公司第二十研究所,2004.
[2]王建农.世界舰船雷达手册[M].南京:南京船舶雷达研究所,1991.
[3]张宝会.微波着陆系统简介[M].宝鸡:陕西长岭电子科技有限责任公司,2004.
Research on ILS and MLS of a US aircraft carrier
GONG Zhao-hui
(Equipment Procurement Center of Navy Armament Department,Beijing 100071)
Abstract:The development of the instrument landing system(ILS)is discussed,and the working principles,the system composition,the performances as well as the main differences and features of the ILS and the microwave landing system(MLS)of the US AN/SPN-41 are emphatically analyzed.
Keywords:aircraft carrier; instrument; microwave; landing
作者简介:龚朝辉(1971-),男,高级工程师,研究方向:雷达总体技术。
收稿日期:2014-12-14
文章编号:1009-0401(2015)01-0007-04
文献标志码:A
中图分类号:TN959.2
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
仪器仪表用户(2022年4期)2022-04-01
仪器仪表用户(2022年3期)2022-03-04
学与玩(2018年5期)2019-01-21
电子制作(2018年10期)2018-08-04
红领巾·探索(2018年12期)2018-01-26
电子制作(2017年13期)2017-12-15
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2016年3期)2016-02-28
