
基于队列行驶的混合动力汽车节能预测控制方法研究
2016-01-27 07:43余开江许孝卓胡治国
系统仿真技术 2015年3期
关键词:混合动力汽车
余开江, 许孝卓, 胡治国, 王 莉
基于队列行驶的混合动力汽车节能预测控制方法研究
余开江, 许孝卓, 胡治国, 王莉

1引言
混合动力汽车是我国目前处理能源危机和环境污染的有效途径之一。随着高速公路的不断建设,车辆的速度不断提高,然而车辆的空气阻力与车速的平方成正比,高速行驶的车辆阻力大部分都是空气阻力。文[1]中提出了基于固定车间距的燃油车辆的队列行驶控制策略,这种控制策略没有考虑新能源汽车队列行驶的情况,而且也没有考虑车间通讯技术的运用,充分利用全部工况信息,设计混合动力汽车预测控制算法,能够有效提高车辆的燃油经济性。
文[2]中提出了基于模型预测控制的混合动力汽车能量管理策略,策略中对车辆的速度模式进行了预测,显著提高了车辆的燃油经济性。由于混合动力汽车可以使用排量更小的发动机,调节发动机工作点,使车辆工作于电动模式,回收再生制动能量为蓄电池充电,使其可以大幅度提高车辆的燃油经济性和降低排放[3~4]。文[5]中采用动态规划算法求解混合动力汽车的模型预测控制问题,预测了车辆的驱动转矩,并运用等效油耗最小控制方法对预测控制算法进行了改进。文[6-8]中利用道路坡度信息预测车辆的未来工况,提出了基于查表方法的道路坡度模型,提高了车辆的燃油经济性。文[9]提出了基于简化系统模型的混合动力汽车模型预测控制方法。文[10]提出了基于跟车模型的3自由度系统模型的混合动力汽车模型预测控制方法。文[11]提出了基于蓄电池电量使用最大化的混合动力汽车模型预测控制方法,并应用于实际的通勤车辆。
本文结合混合动力汽车队列行驶的实际,针对混合动力汽车能够利用电机调节发动机工作点的特点,采用简化的系统结构模型,提出了基于队列行驶的混合动力汽车模型预测实时控制系统,并成功应用于计算机仿真,取得了显著的成效,为混合动力汽车队列行驶系统的成功实施奠定了基础。
2系统模型
假设队列行驶系统中有两辆混合动力汽车,它们分别为自车和前车。每一辆混合动力汽车包含5大动态部件,如图1所示。它们是发动机,蓄电池,2个电机和车轮。行星齿轮作为动力分配装置既有速度耦合器的作用,又有电子无极变速器作用。根据车辆机械耦合和电子耦合关系,可以列写系统动力学方程。对动力学方程解耦,最终可以获得系统的状态空间模型,如式(1)所示[12-14]:
x=[p1v1w1SOC1p2v2w2SOC2]

(1)
式中,x为状态量,u为控制量。参数p1,v1,w1和SOC1为自车的位置,速度,考虑延迟的驱动加速度和蓄电池荷电状态。参数p2,v2,w2和SOC2为前车的位置,速度,考虑延迟的驱动加速度和蓄电池荷电状态。参数u1,u2,Pbatt1和Pbatt2为自车的驱动加速度,前车的驱动加速度,自车蓄电池的充放电功率和前车蓄电池的充放电功率。参数ρ,CD1,CD2,A1,A2,m1,m2,g,μ,θ1和θ2是空气密度,自车空气阻力系数,前车空气阻力系数,自车迎风面积,前车迎风面积,自车质量,前车质量,重力加速度,滚动阻力系数,自车道路坡度和前车道路坡度。VOC,Rbatt和Qbatt是蓄电池开路电压,内阻和容量。
车辆的燃油经济性评价采用威兰氏线性模型,如式(2)所示。
(2)
式中mf为燃油消耗率。参数Preq为车辆需求功率。cf为常数参数。
3模型预测控制策略
基于队列行驶的混合动力汽车能量管理模型预测最优控制策略的步骤为:首先检测自车和前车状态,包括位置,速度和加速度信息,其次运用所建立的数学模型和公式化控制策略求解最优控制问题,最后应用所求得的最优控制序列的第一个控制量于系统。由于模型预测控制为区间最优控制,所以其求得的最优控制量是数量为预测区间除以采样间隔的序列。最优控制序列的第一个控制量与实际状态最接近,所以一般采用它来作为实际的控制量。
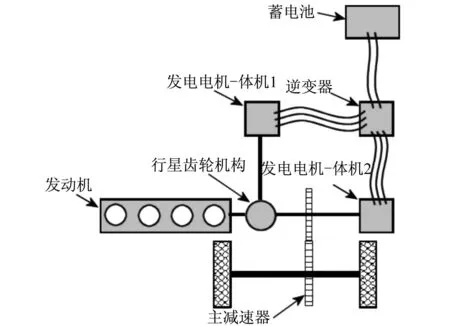
图1 功率分割式混合动力汽车结构Fig.1 Configuration of the power-split plug-in hybrid electric vehicle
模型预测控制的基本原理为:在每一个采样时刻,根据预测模型对系统未来代价函数进行预测,通过对未来预测区间内的性能指标进行优化,并根据实测对象的输出进行反馈校正,将控制策略设计转化为 优化过程,通过求解相应预测区间的优化问题得到控制序列,并将序列的第一个控制量作用于系统,实现反馈控制,之后在下一个采样时刻,将预测区间向前推进一步,不断重复该过程。总结来说其包括三部分:预测模型,滚动优化和反馈控制。通过对未来系统输入的预测可以实现对系统的实时最优控制。
本控制策略的特色有两点。第一,随着汽车导航,数字化地图,车间通信技术和智能交通系统的发展,利用道路交通状况,对混合动力汽车速度模式进行最优化。第二,前方有车辆的情况下,传统的固定车间距的控制算法现在还是主流,车间距离在最小值以上浮动的控制策略,提高了车辆速度变化的自由度,使混合动力汽车燃油经济性的提高有了可能。上述两大特色在控制策略设计中评价函数里有相应体现,为混合动力汽车系统性能提高提供了更大可能性。
预测模型在已在上部分论述。
最优控制问题定义如式(3)所示。
(3)
式中T为预测区间。参数Pbatt1min,Pbatt1max,Pbatt2min,Pbatt2max,u1max,u1min,u2max和u2min为控制量约束。
评价函数定义如式(4)所示。
L=wxLx+wyLy+wzLz+wdLd+
weLe+wfLf+wrLr
Lz=0.0874(m1w1v1/1000-Pbatt1)/
0.0874(m2w2v2/1000-Pbatt2)/
Ld=(SOC1-SOCd)2+(SOC2-SOCd)2

Lf=(-ln[SOC1-0.6]-ln[0.8-SOC1])+
(-ln[SOC2-0.6]-ln[0.8-SOC2])
(4)
式中SOCd是目标蓄电池荷电状态。vd是车辆目标速度,它取值为车辆最优等速燃油经济性速度。wx,wy,wz,wd,we,wf,和wr是权重系数。dd为最低车辆间距,评价函数设置使其在最低车辆间距以上浮动,从而增加控制自由度,提高车辆燃油经济性。障碍函数用于处理系统状态约束等。
最优控制问题中的非等式约束通过引入虚拟输入ud转化为等式约束
(5)
式中umax代表控制量输入的极限值。
为求解上述最优控制问题,哈密尔顿函数定义如下:
(6)
式中λ代表协状态,μ代表拉格朗日乘数.
最优控制量u,拉格朗日乘数μ,协状态λ的驻点条件是:

(7)
式中t0是初始时间,x0是初始状态。
上述驻点条件可以转化为:
(8)
(9)
方程(8)等价于:

(10)
如果雅可比矩阵FU非奇异,则
(11)
上述差分方程可以由广义最小残量方法求解.这是一种连续广义最小残量方法。因为没有必要用迭代方法求解雅可比矩阵和线性方程,这种方法计算量很小,能够满足实时最优控制的要求。本解法在参考文献[15]中有详细论述,在此不在赘述。
在每个采样时刻,首先,测取前车位置,自车位置,前车速度,自车速度,前车加速度,自车加速度,前车蓄电池荷电状态和自车蓄电池荷电状态等实时状态信号,其次,利用全球定位系统和智能交通系统预测未来一定区间车辆及周围环境的状态,再次,根据建立的车辆模型和最优控制问题,利用上述数值快速解法求解预测区间内的最优控制序列。应用预测区间内的最优控制序列的第一个控制量于车辆。之后在下一个采样时刻,将预测区间向前推进一步,如此循环往复,实现在线最优控制,如图2所示。

图2 模型预测控制策略流程图Fig.2 Flowchart of the model predictive control strategy
4仿真与分析
本算法采用计算机仿真进行验证。混合动力汽车参数采用丰田普锐斯混合动力汽车的数据。道路坡度信息采用实测数据。采用文献1中的固定车间距控制作为对比方法。
空气阻力系数与车间距的关系采用以下多项式来近似(参照图3)。
Ci(d(t))=ci1d7(t)+ci2d6(t)+ci3d5(t)+
ci4d4(t)+ci5d3(t)+ci6d2(t)+ci7d(t)+ci8
(16)
式中ci1-ci8为常数参数。
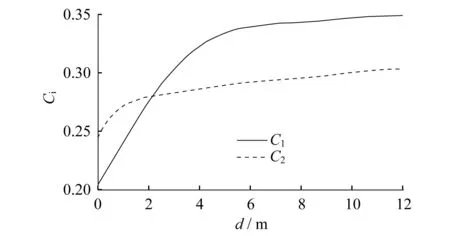
图3 空气阻力系数和车间距的近似关系Fig.3 Approximation of C1 and C2 with respect to the spacing d
实验结果如图4和图5所示。模型预测控制方法车速变化结果如图4所示。第一行为实际的道路坡度信息,第二行为车辆速度,第三行为蓄电池的荷电状态,第四行为车间距。通过预测未来道路坡度信息,车辆能够提前加速或者减速,利用车辆在坡道上行驶的动能节省燃料。车间距迅速收敛,减少了空气阻力。模型预测控制方法的动力分配结果如图5所示。第一行为空气阻力消耗的功率,第二行为空气阻力系数,第三行为瞬时油耗,第四行为累积油耗。通过预测未来道路坡度信息,车辆的空气阻力系数得到优化,有效提高了燃油经济性。
表1为两种控制策略下的车辆燃油经济性数据对比。和传统的混合动力汽车数据对比,混合动力汽车的燃油经济性有了显著提高。
本算法的计算速度很快。仿真时间为360s,而计算时间只需41s。单位采样间隔下的计算时间只有采样间隔的九分之一左右。所以本算法是有可能实现实时最优控制的。
5结束语
本文提出了基于降阶系统模型的混合动力汽车队列行驶模型预测控制系统。本系统在计算机仿真平台中成功应用,可以实现实际道路条件下车辆队列行驶过程的优化控制,显著提高了车辆的燃油经济性,并满足系统的实时最优控制要求,具有很高的应用价值。
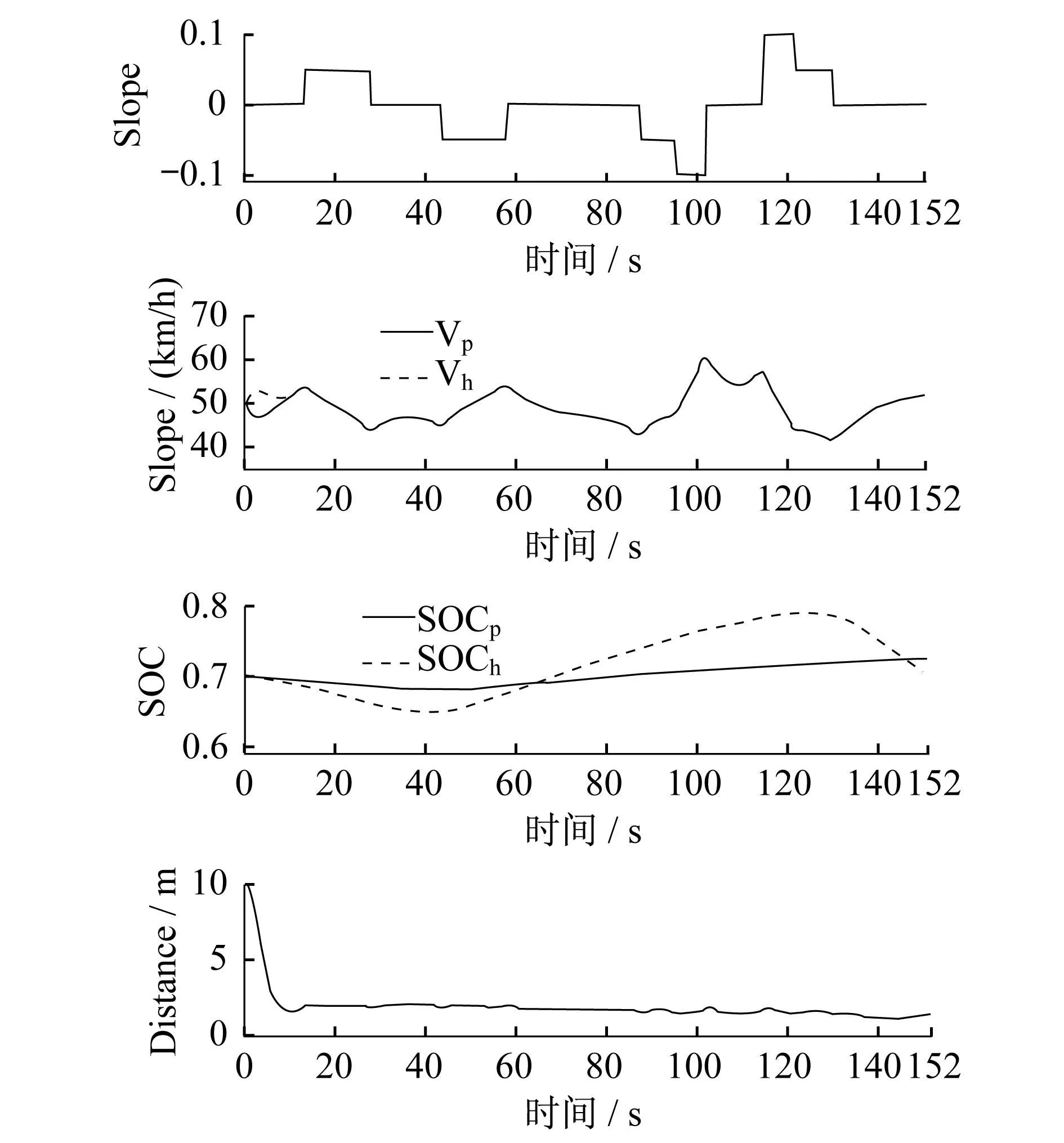
图4 模型预测控制速度模式结果Fig.4 Simulation results of the speed profile using the model predictive control method
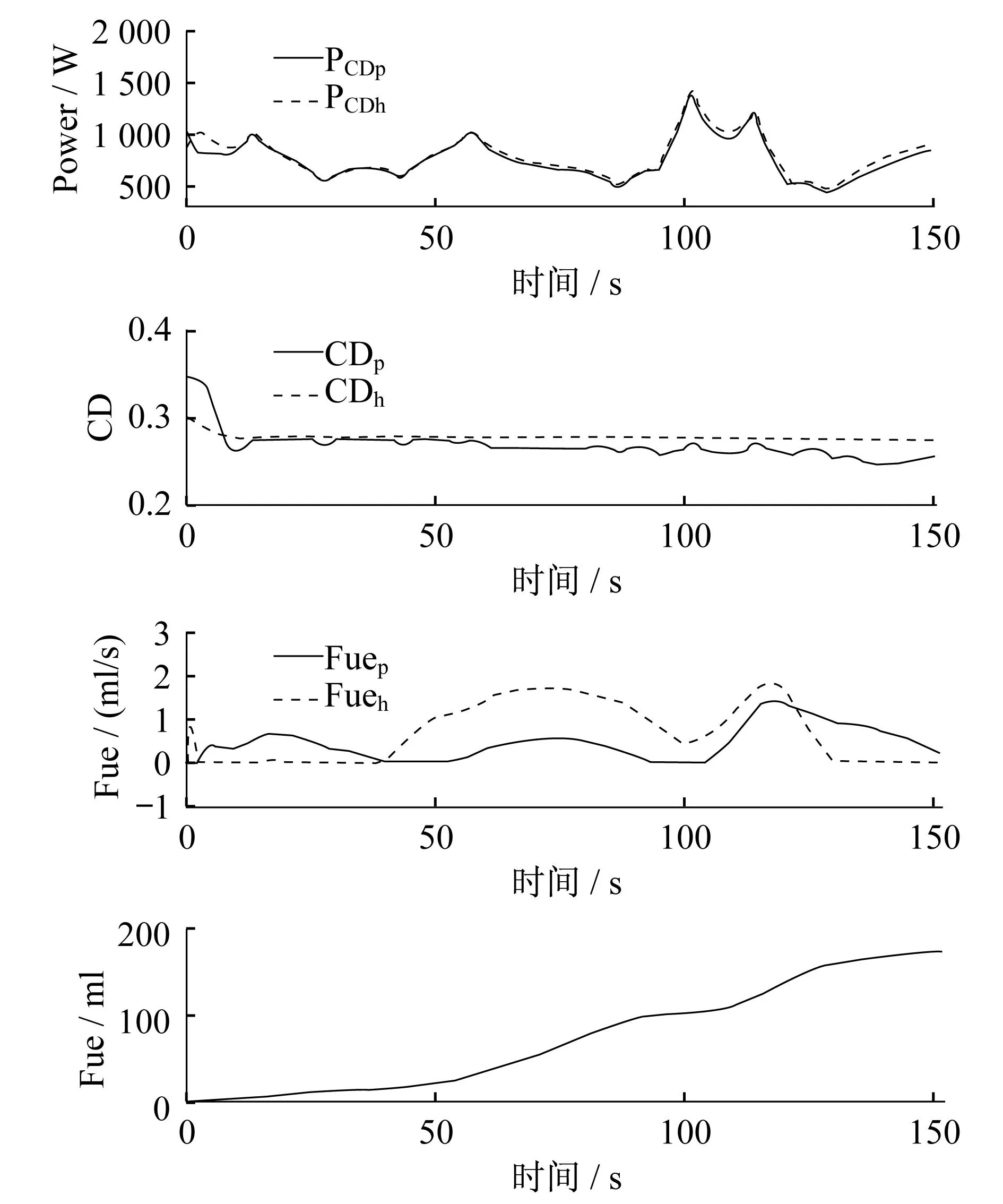
图5 模型预测控制动力分配结果Fig.5 Simulation results of the power-split profile using the model predictive control method

表1 燃油经济性对比
参考文献:
[1]Swaroop D,Hedrick J K,Chien C C,et al.A comparison of spacing and headway control laws for automatically controlled vehicles[J].Vehicle Syst.Dynamics J.,1994,23(8):597-625.
[2]Koot M,Kessels J T B A,de Jager B,et al.Energy management strategies for vehicular electric power systems[J].IEEE Transactions on Vehicular Technology,2005,54(3):771-782.
[3]Sciarretta A,Guzzella L.Control of hybrid electric vehicles[J].IEEE Control Syst.Mag.,2007,27(2):60-70.
[4]Moura S J,Fathy H K,Callaway D S,et al.A stochastic optimal control approach for power management in plug-in hybrid electric vehicles[J].IEEE Trans.Control Syst.Technol.,2011,19(3):545-555.
[5]Borhan H,Vahidi A,Phillips A M,et al.MPC-based energy management of a power-split hybrid electric vehicle[J].IEEE Trans.Control Syst.Technol.,2012,20(3):593-603.
[6]Hellstrom E,Aslund J,Nielsen L,Design of a well-behaved algorithm for on-board look-ahead control[C].In:Proceeding of IFAC World Congr.,Seoul,Korea,2008.
[7]Kamal MAS,Mukai M,Murata J,et al.Ecological vehicle control on roads with up-down slopes[J].IEEE Trans.Intell.Transp.Syst.,2011,12(3):783-794.
[8]Deguchi Y,Kawabe T.HEV charge/discharge control system based on navigation information[J].SAE,2004-21-0028,2004.
[9]YuKaijiang,Mukai M,Kawabe T.Model predictive control of a power-split hybrid electric vehicle system[J].Artificial Life and Robotics,2012,17(2):221-226.
[10]Yu Kaijiang,Mukai M,Kawabe T.Performance of an eco-driving nonlinear MPC system for a power-split HEV during car following[J].SICE Journal of Control,Measurement,and System Integration,2014,7(1):55-62.
[11]Yu Kaijiang,Mukai M,Kawabe T.A battery management system using nonlinear model predictive control for a hybrid electric vehicle[C].Japan:7th IFAC Symposium on Advances in Automotive Control,2013.
[12]Ehsani M,Gao Y,Emadi A.Modern electric,hybrid electric,and fuel cell vehicles:fundamentals,theory,and design,2nd edn[M].CRC press,Boca Raton,pp 138-144,2009.
[13]Liu J M,Peng H.Modeling and control of a power-split hybrid vehicle[J].IEEE Trans Control Syst.Technol.,2008,16(6):1242-11251.
[14]Rotenberg D,Vahidi A,and Kolmanovsky I.Ultracapacitor assisted powertrains:modeling,control,sizing,and the impact on fuel economy[J].IEEE Trans Control Syst.Technol.,2011 19(3):576-589.
[15]Ohtsuka T.A continuation/GMRES method for fast computation of nonlinear receding horizon control[J].Automatica,2004,40(4):563-574.
余开江男(1985-),河南焦作市人,博士,讲师,主要研究方向为车辆控制,模型预测控制。
许孝卓男(1981-),河南焦作市人,硕士,讲师,主要研究方向为特种电机物理场分析、优化设计研究。
(河南理工大学,河南 焦作454000)
摘要:针对传统混合动力汽车控制方法不考虑队列行驶对车辆能量管理影响的问题,本文提出了基于队列行驶的混合动力汽车节能预测控制智能优化策略。通过建立混合动力汽车系统的降阶模型,并采用连续广义最小残量方法求解模型预测控制问题。运用计算机进行仿真,仿真结果验证了系统模型的有效性,以及所设计的模型预测控制算法大幅度提高混合动力汽车的燃油经济性的能力和实时控制性能。
关键词:模型预测控制; 混合动力汽车; 队列行驶
Research on Model Predictive Control Strategies for Hybrid Electric Vehicles Based on Vehicle PlatooningYUKaijiang,XUXiaozhuo,HuZhiguo,WangLi
(Henan Polytechnic University,Jiaozuo,454000,China)
Abstract:This paper proposed model predictive control intelligent optimization strategies based on vehicle platooning for hybrid electric vehicles to deal with energy management problems without consideration of vehicle platooning in conventional control strategies.The reduced order system model was developed.The model predictive control problem was solved using continuation/generalized minimum residual method.The simulation was conducted using computers.The results showed that the proposed model is effective,and the proposed model predictive control method can improve fuel economy significantly and can be implemented in real-time.
Key words:model predictive control; hybrid electric vehicles; vehicle platooning
基金项目:国家自然科学基金(51405137);河南省高等学校重点科研项目(15A470014);焦作市2014年科技计划项目(2014110013);河南理工大学博士基金(60807/010);河南理工大学创新型科研团队支持计划基金(T2015-2)
中图分类号:U 469.72; TP 273.1
文献标识码:A
猜你喜欢
现代电子技术(2017年6期)2017-04-10
山东工业技术(2017年6期)2017-03-28
山东工业技术(2017年6期)2017-03-28
青春岁月(2017年4期)2017-03-14
大陆桥视野·下(2016年11期)2017-02-28
汽车工程学报(2016年5期)2017-01-16
汽车工程学报(2016年6期)2017-01-11
科技与创新(2015年23期)2015-12-08
现代电子技术(2015年22期)2015-12-02
科技与创新(2015年17期)2015-09-11
