基于特征结构配置的变稳控制技术研究
2016-02-16 08:13陈林崔彦勇涂慧玲肖成方李玉飞
教练机 2016年3期
陈林,崔彦勇,涂慧玲,肖成方,李玉飞
(中航工业洪都,江西南昌,330024)
基于特征结构配置的变稳控制技术研究
陈林,崔彦勇,涂慧玲,肖成方,李玉飞
(中航工业洪都,江西南昌,330024)
研究了变稳基本原理及变稳控制律设计方法。基于特征结构配置方法,通过设计飞机的纵向和横航向变稳控制律,使原型机模拟目标机的响应特性,并通过Simulink仿真,验证了变稳控制律的跟踪效果。
变稳控制律;特征结构配置;Simulink仿真
0 引言
变稳飞机是一种借助变稳电传系统和可变人感达到改变基本飞机飞行动力学特性、稳定性与操纵性达到模拟其它飞机特性的空中飞行试验平台。通过变稳模拟新机特性可以帮助提早发现缺陷,缩短研制周期,节省开支,并且可用于培训飞行员。西方一直致力于变稳机的研究,包括从单自由度到六自由度,国内研制出的变稳机有BW-1单轴变稳机和K-8V多轴变稳机。
实现空中飞行模拟主要有两种方法:响应反馈法和模型跟踪法。本文运用响应反馈法,并基于特征结构配置设计变稳控制律,以原型机模拟目标机的响应。为两机建立线性小扰动方程,通过Simulink仿真验证变稳控制的跟踪效果。
1 变稳基本原理和设计方法
1.1 变稳基本原理
空中飞行模拟最重要的是保证原型机和目标机间的运动相似,若原型机的运动方程组为:

式中:X表示状态向量,u为控制量,φ为外扰动量。目标机的运动方程为:

则保证控制原型机和目标机运动相似的条件为在相同的初始条件:X(t0)=Xm(t0)下,存在着保证t≥t0时,两机状态向量相等
的控制:u(t)∈G在任何时候

式中,G和Gm为可能的控制范围;F和Fm为可能的外扰动范围。
显然,如何满足X(t)=Xm(t)的控制,从而获得两机运动相似,进而实现相同的动态响应和飞行员感觉,构成了空中飞行模拟的理论基础和关键技术。
1.2 变稳设计方法
变稳控制方法主要有:响应反馈法和模型跟随法,响应反馈法的模拟频带高,系统延迟小,基于目标机自然频率大于原型机的自然频率,因此选择响应反馈作为变稳控制方法,并运用特征结构配置计算其反馈增益矩阵。
设原型机和目标机的线性方程分别如下:

要实现空中飞行模拟,即使原型机响应等效于目标机,可令

由上述整理可得原型机控制律如下:

式中,K=[BTB]-1BT(Am-Ap)为反馈增益,Kq=[BTB]-1BTBm为前馈增益。响应反馈方式简化结构如图1所示。
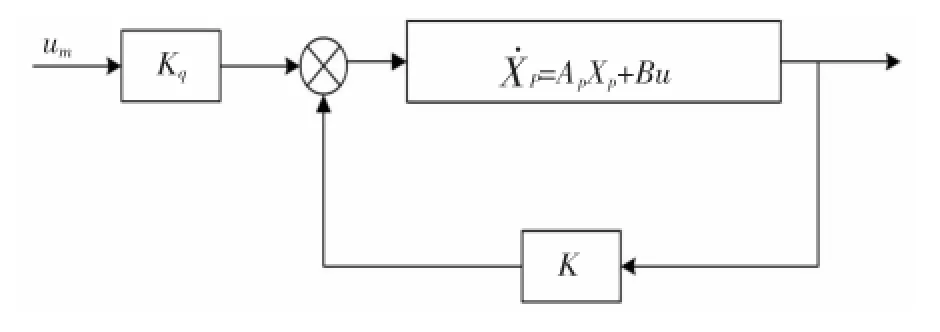
图1 响应反馈结构
由现代飞行控制理论可知,线性定常系统的响应与系统的特征值和特征向量有关。在响应反馈法的基础上,通过特征结构配置使得在对应状态点,原型机和目标机有相同的特征值和特征向量,即可使原型机跟踪目标机的响应,达到变稳的目的。
设线性系统如下:

其中A∈Rn×n;B∈Rn×m;C∈Rr×n;D∈Rr×m;x∈Rn×1。
令反馈控制律为:u=Kpy,将其代入线性系统公式如下:

对于线性系统,若给定需要配置的特征值和对应特征向量为{λi}和{},i=1,2,…,n满足Woonham定理的条件,即可求得唯一的反馈矩阵Kp,使得矩阵G有规定的特征值和特征向量。

设zi是Vi的前m个元素,Z=[λ1z1…λnzn],选择A的前m行生成另一矩阵A1,Kp矩阵的计算公式如下[2]:

2 变稳控制律设计
2.1 纵向变稳控制律设计

模拟目标机的短周期特性,即利用原型机的小扰动方程配置目标机短周期的两个共轭复根以及其对应的特征向量。短周期模态主要特征为迎角α和俯仰角ϑ呈快速的周期性变化,选取α和ωz作为反馈,纵向变稳控制律设计方案如图2所示。
图2中反馈增益矩阵K基于特征结构配置法求得。
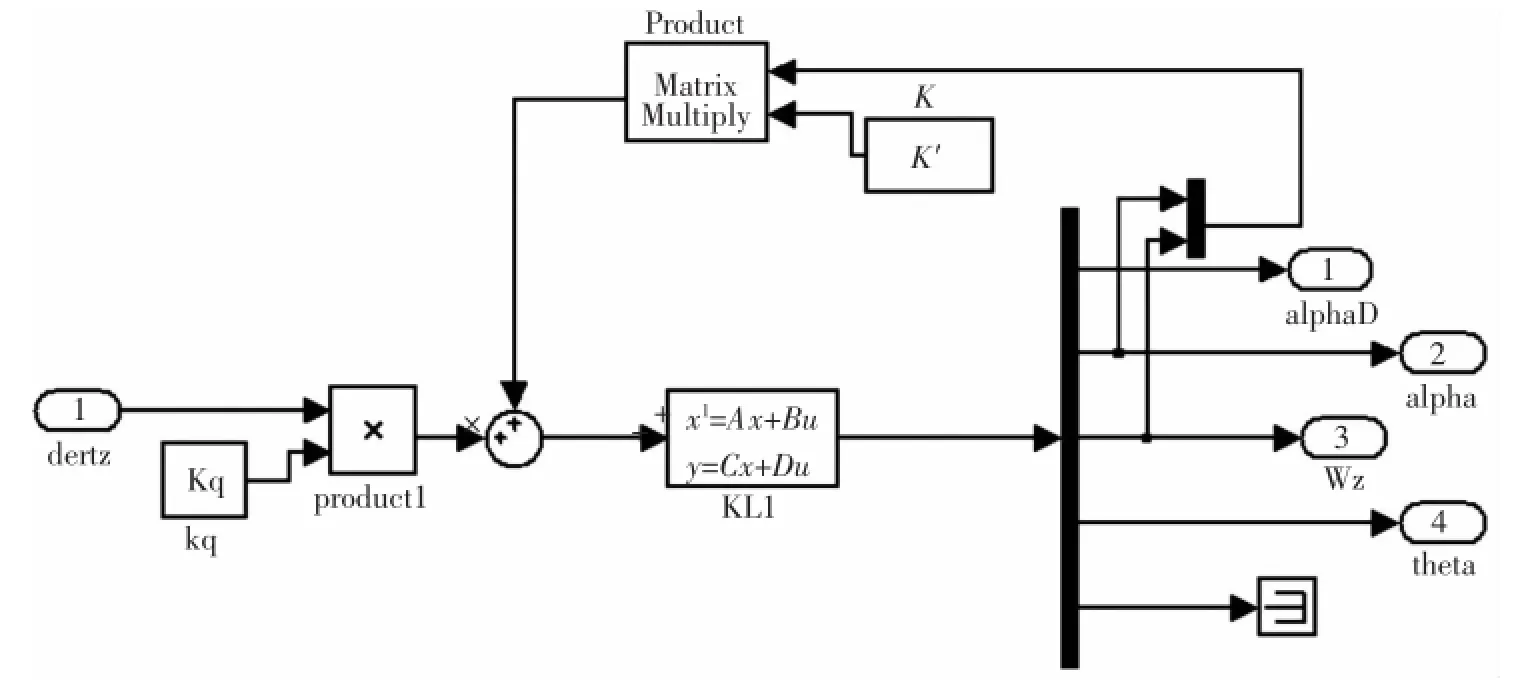
图2 纵向变稳控制律框图

首先,不加入变稳控制律,原型机和目标机输入相同的平尾阶跃指令,响应如图3所示。
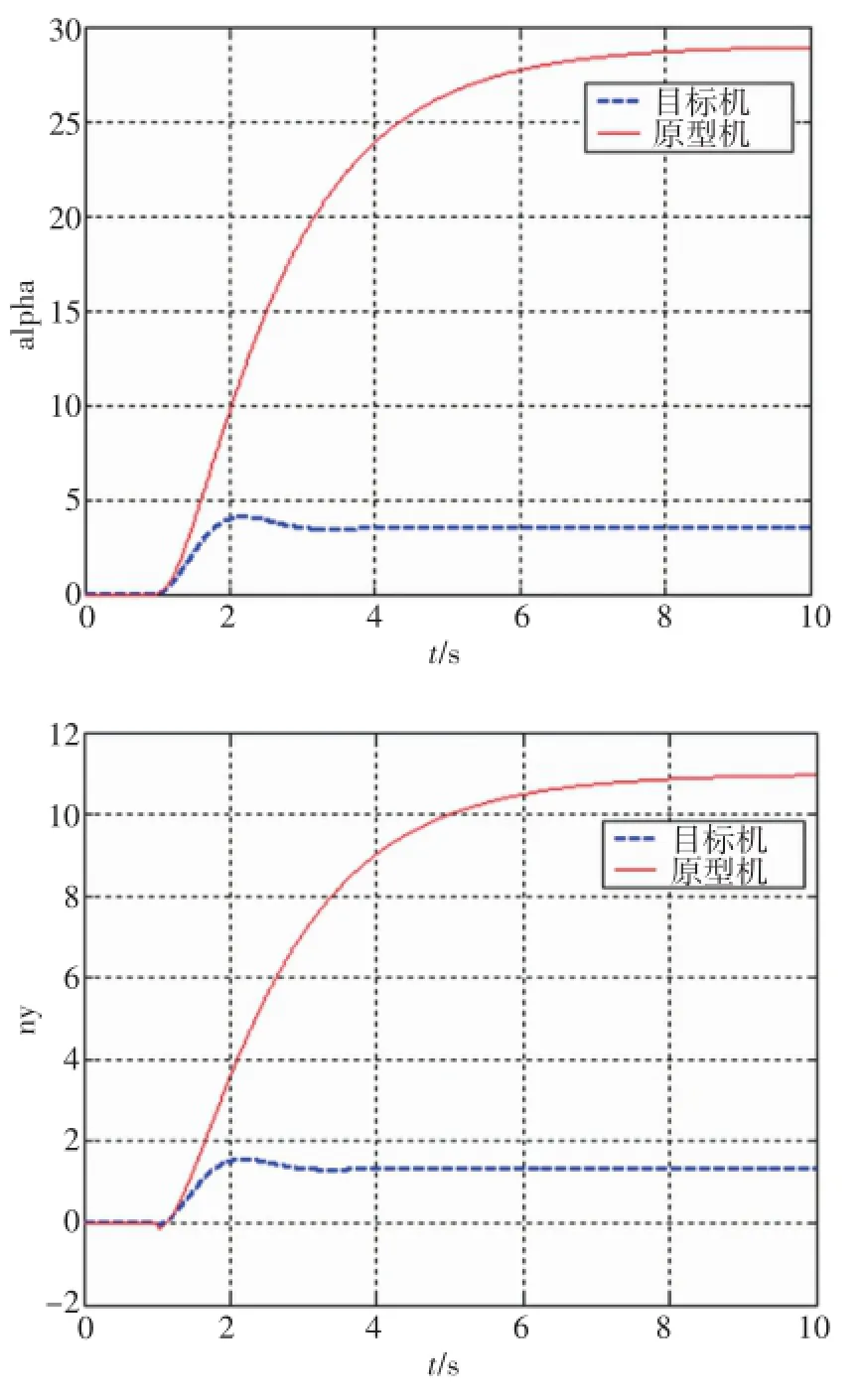
图3 飞机本体纵向响应对比曲线
由图3可知:在相同的纵向舵面输入下,原型机和目标机的响应差异很大,根据前述反馈增益矩阵K和前向增益值Kq的设计结果,原型机加入变稳控制律,变稳机和目标机输入相同的平尾阶跃指令,仿真曲线如图4所示。
由仿真曲线可知,加入变稳控制律后,变稳机能完全跟踪目标机迎角和法向过载响应。
2.2 横航向变稳控制律设计
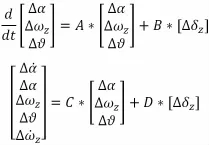
横航向有两个可控自由度(副翼和方向舵),无直接侧力控制面,通过方向舵不能完全模拟目标机的侧力导数,航向运动不能被完全跟踪,文中主要设计跟踪横向响应。横航向的三个模态分别为:荷兰滚模态、滚转模态和螺旋模态,三个模态对应有四个特征值以及对应的特征向量,若其特征值和特征向量能够被完全配置,原型机可以得到和目标机相同的模态特性,然而由于无直接侧力控制,四个特征向量不能被完全配置,因此在选取需要配置的特征向量时舍弃次要因素,使跟踪效果更加理想。三自由度横航向小扰动方程如下:
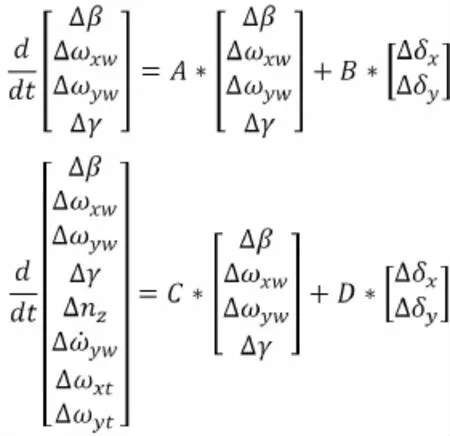

图4 变稳机纵向响应跟踪曲线
横航向中荷兰滚模态表现为飞机的滚转角γ和侧滑角β作周期性振动,滚转模态是参数为滚转角γ的非周期运动,螺旋模态代表了一种滚转和偏航的非周期性运动。因此在横航向的变稳控制律中选择β、ωxw、ωyw和γ作为反馈。横航向变稳控制律回路设计方案如图5所示。
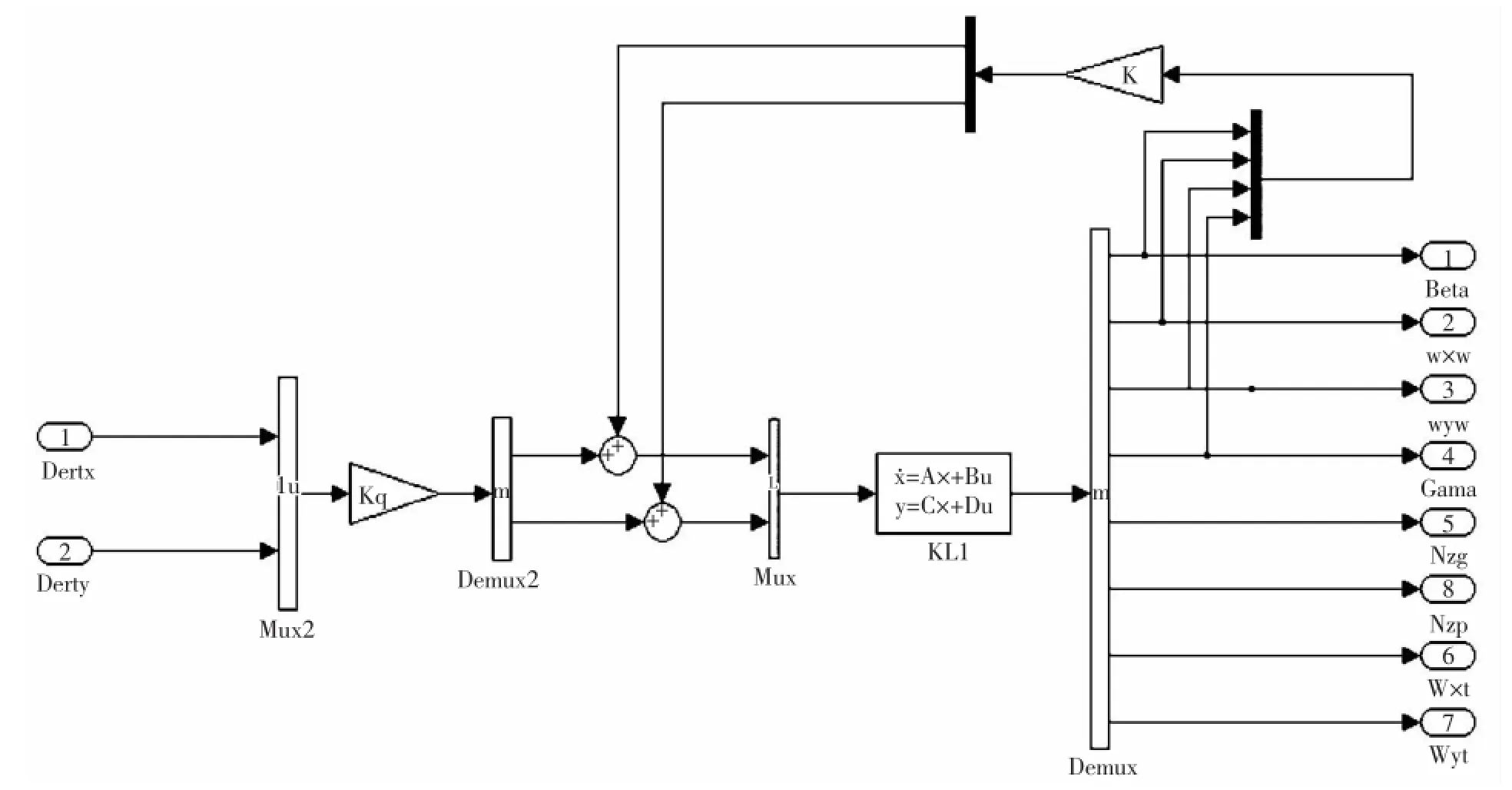
图5横航向变稳控制律框图
图5 中反馈增益矩阵K由特征结构配置求得。
横航向选取适当变稳状态点,根据两者横航向状态空间矩阵计算得出反馈增益矩阵及前向增益为:
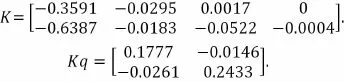
首先,不加入变稳控制律,原型机和目标机输入相同的副翼阶跃指令,响应曲线如图6所示。
原型机和目标机输入相同的方向舵阶跃指令,响应曲线如图7所示。
由两机本体横向响应对比曲线知,输入相同的阶跃指令后原型机副翼效率大于目标机的副翼效率,由两机本机航向响应侧滑角曲线知,原型机较目标机侧滑角衰减较快,偏航阻尼更大。为使原型机跟踪目标机的响应,需设计变稳控制律降低原型机的偏航阻尼,根据前述反馈增益矩阵K和前向增益值Kq的设计结果,原型机加入变稳控制律,变稳机和目标机输入相同的副翼阶跃指令,仿真曲线如图8所示。
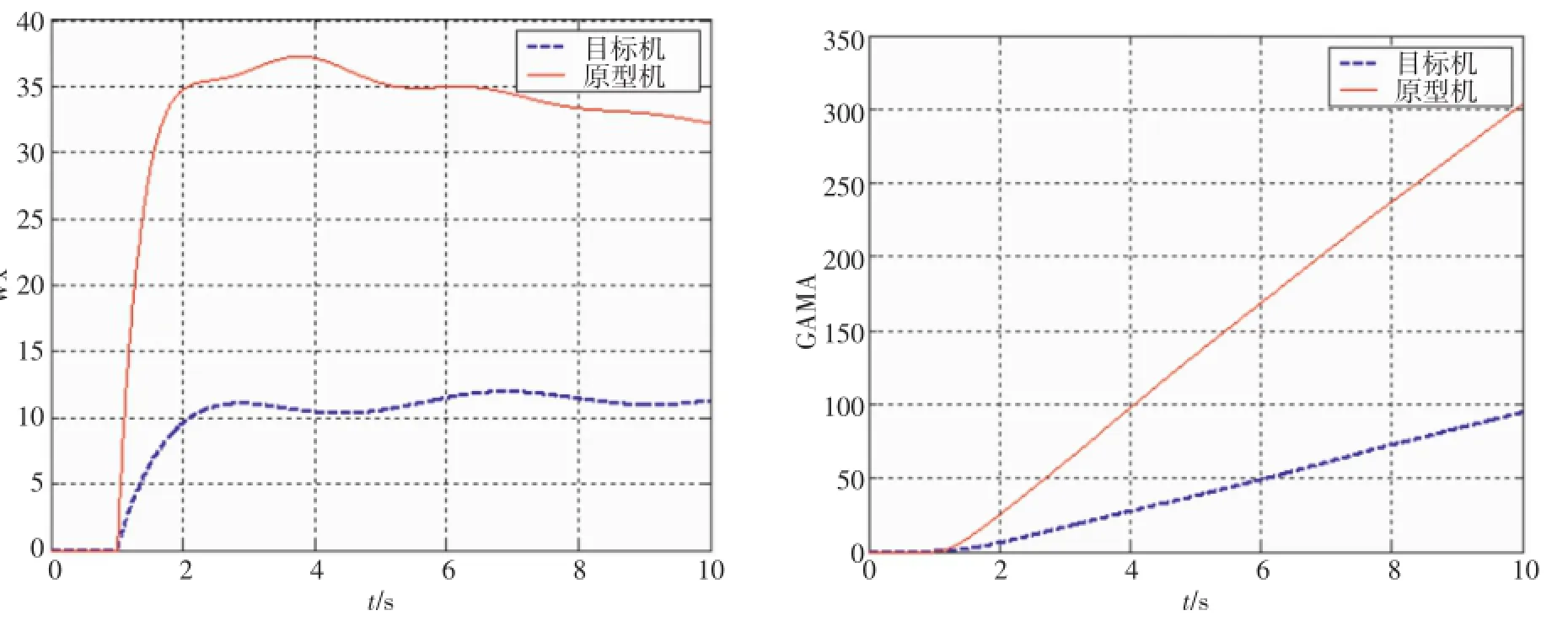
图6 飞机本体横向响应对比曲线
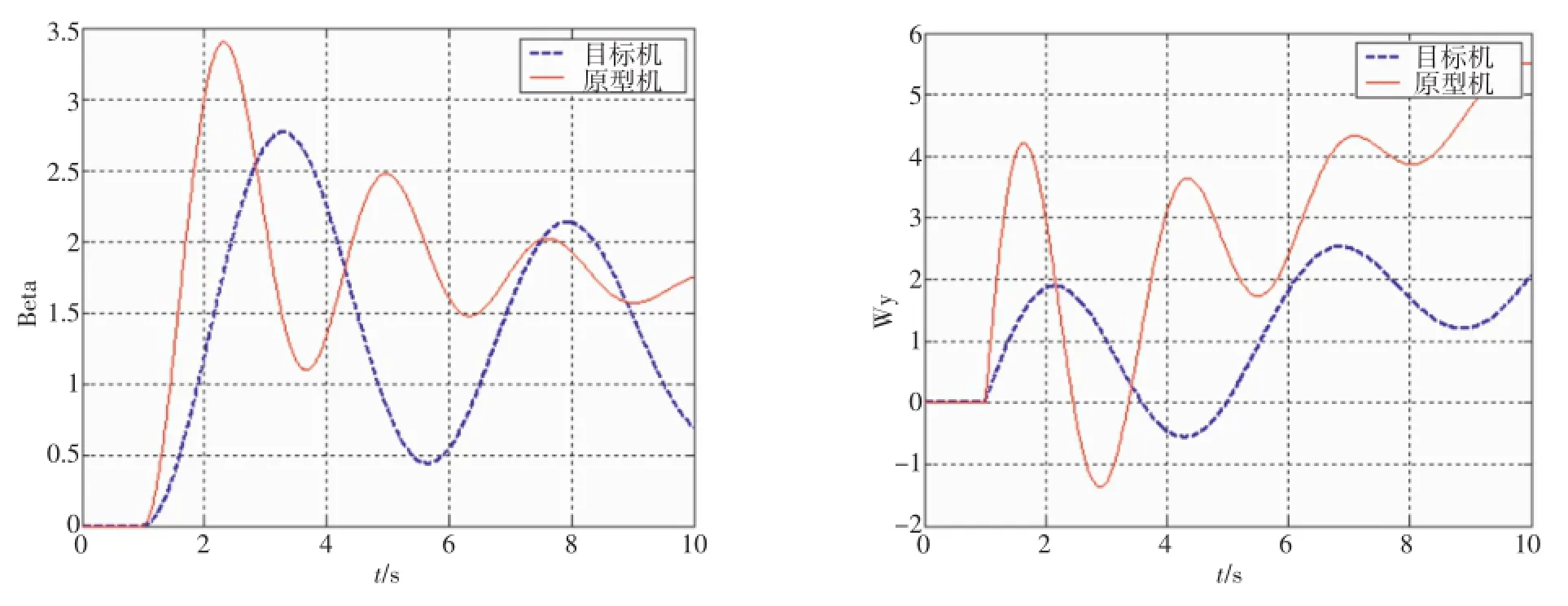
图7 飞机本体航向响应对比曲线
变稳机和目标机输入相同的方向舵阶跃指令,仿真曲线如图9所示。
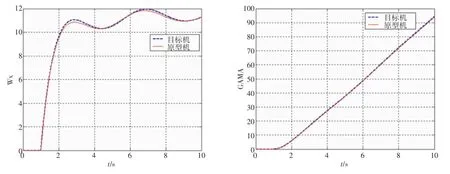
图8 变稳机横向响应跟踪曲线
由仿真曲线知,输入相同的副翼和方向舵阶跃指令,变稳机基本能够跟踪滚转角速率和滚转角的响应,由于侧力导数不能被完全模拟,因此,侧滑角和偏航速率的跟踪效果不理想。
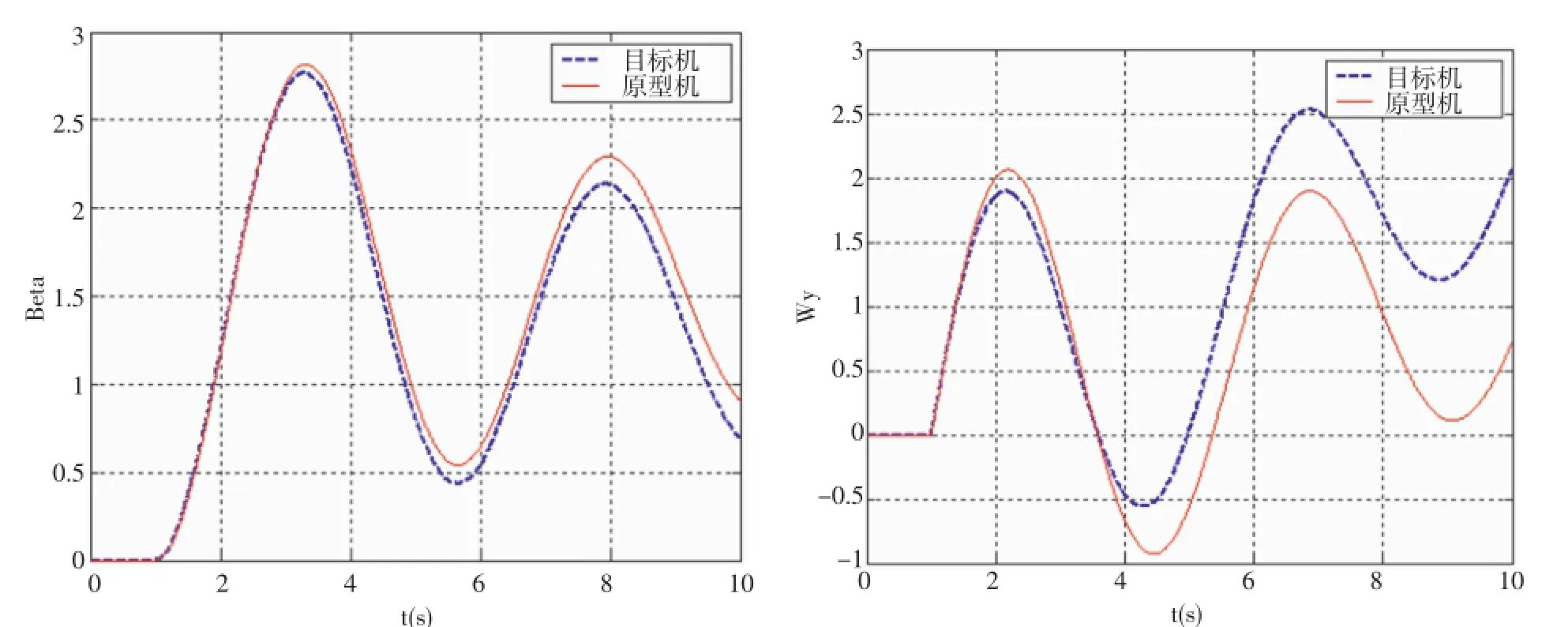
图9 变稳机航向响应跟踪曲线
3 结语
本文基于响应反馈原理运用特征结构配置方法给出了三自由度变稳控制律设计方法,以某型飞机为平台,针对单状态点设计了纵、横航向变稳控制律参数,以原型机跟踪目标机的响应特性,通过建模仿真验证了原型机基本能跟踪目标机的响应特性。
[1]刘兴堂.空中飞行模拟器.北京:国防工业出版社,2003.
[2]章卫国.现代飞行控制系统设计.西安:西北工业大学出版社,2009.
[3]方振平.带自动器飞机飞行动力学.北京:国防工业出版社,1999.
>>>作者简介
陈林,男,1980年出生,2002年毕业于南京航空航天大学,高级工程师,主要研究领域为电传飞行控制系统及飞行控制律设计。
Study on Variable Stability Control Technique Based on Eigenstructure Assignment
Chen Lin,Cui Yangong,Tu Huiling,Xia Chengfang,Li Yufei
(AVIC-HONGDU,Nanchang,Jianxi,330024)
Studies on basic principle and design method of control laws for variable stability has been conducted,the prototype simulated the response characteristics of target drome resulted from designed longitudinal and lateral variable stability control laws based on eigenstructure assignment,which passed the Simulink simulation to prove the tracing effect of variable stability control laws.
Variable stability;Eigenstructure assignment;Simulink simulation
2016-07-26)
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年9期)2021-11-27
新世纪智能(高一语文)(2021年3期)2021-07-16
汽车维修与保养(2021年11期)2021-03-11
沈阳工业大学学报(2020年3期)2020-06-03
西安航空学院学报(2020年1期)2020-06-01
电子技术与软件工程(2020年17期)2020-02-02
舰船电子工程(2019年9期)2019-09-27
民用飞机设计与研究(2019年4期)2019-05-21
电子制作(2017年24期)2017-02-02