浅谈谷歌地图在陈旧航片像片像控点测量中的应用
2016-02-22 12:51张进
科技视界 2016年4期
张进


【摘 要】本文通过实例说明了谷歌地图在陈旧航片像控点测量中的应用,对其作业流程、像控点的选择要求以及具体作业过程逐一进行了阐述。
【关键词】像控点;全球重力场模型;坐标系统
0 引言
虽然摄影测量以其快速高效的特点在大面积的地形图测绘中得到了广泛的应用,但是摄影测量的关键环节是影像采集,这一环节受到的制约因素多,如成本费用大、天气条件要求高、空域申请时间长,因此一个地区航摄影像采集后,相当一段时间内不会再重新采集航摄影像,特别是我国西南地区受天气和地方经济情况的影响,20世纪60年代和70年代的航摄影像资料都未进行更新。当工程项目位于航摄影像时相陈旧的地区时,航测外业像片控制测量中,像片控制点判刺难度将非常大,这就提出了如何快速准确判刺像控点的问题,下面就谈谈我们的解决方法。
1 解决方法
1.1 作业流程
1)根据测区范围图计算所在的1/1万地形图号,将测区范围展绘到1/1万地形图上,根据此图到测绘地理信息局收集航片资料;
2)在两台计算机上分别打开扫描航摄影像和谷歌地图,在像控点选择区域内逐个选择航摄影像和谷歌地图上满足像控点要求的同名点并标注,完成后将谷歌地图改名存盘,如XKD.kml;
3)按文本方式打开像控点.kml文件,提取像控点的经纬度,并在谷歌地图上读取各点的高程;
4)坐标系统设计;
5)像控点概略成果计算;
6)坐标高程转换关系计算;
7)像控点实地判刺与RTK像控点联测。
1.2 像控点的选择要求
1.2.1 观测条件要求
1)视场内障碍物的高度角不宜大于15°;
2)远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200m;远离高压输电线和微波无线电信号传送通道,其距离不应小于50m;
3)附近不应有强烈反射卫星信号的物件(如大型建筑物);
4)选站时应尽可能使测站附近的局部环境(地形、地貌、植被等)与周围的大环境保持一致,以减少气象元素的代表性误差。
1.2.2 位置要求
1)像控点的目标,易于判读;
2)布设的像片控制点应能公用;
3)像控点距像片边缘不应小于1cm;
4)像控点距像片的各类标志不应小于1mm;
5)像控点应能控制整个测区,每个相对像控点的控制范围:航向和旁向均不小于像幅的1/3。
2 案例分析
2.1 资料收集
某工程测区面积约14km2,成图比例尺为1:2000,经计算测区与所在1/1万图幅的关系如图1所示,根据图1到测绘地理信息局查询得知测区范围包括两条航线共四个像对,其中一条航线三个像对4张像片,另一条航线一个像对2张像片。
2.2 像控点选定
通过航片和谷歌地图认真细致的比对选定11个像控点,点位分布情况如图2。
以像控点PG01在谷歌地图和航片上的影像如图3、图4为例说明一下它他们的区别。从图3、图4比较可得知两影像有表1所列的差异。
2.3 像控点成果导出
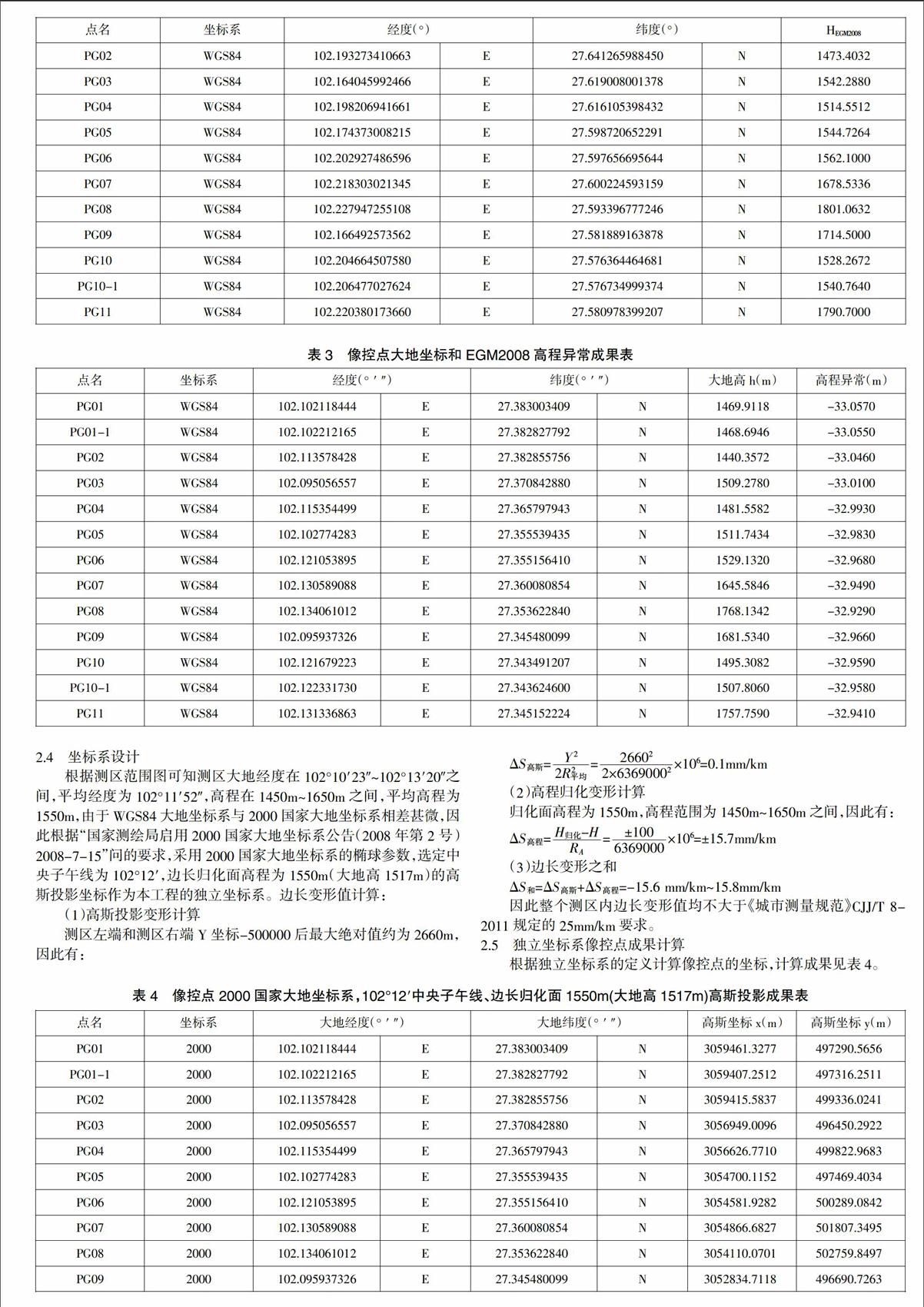
像控点选点完成后打开像控点.kml文件得到像控点的经纬度,在谷歌地图上读得HEGM2008高程,成果见表2。
将表2的成果转换为以度分秒为单位的经纬度,并根据全球重力场模型EGM2008算出各点的高程异常和大地高。经计算成果见表3。
2.4 坐标系设计
根据测区范围图可知测区大地经度在102°10′23″~102°13′20″之间,平均经度为102°11′52″,高程在1450m~1650m之间,平均高程为1550m,由于WGS84大地坐标系与2000国家大地坐标系相差甚微,因此根据“国家测绘局启用2000国家大地坐标系公告(2008年第2号)2008-7-15”问的要求,采用2000国家大地坐标系的椭球参数,选定中央子午线为102°12′,边长归化面高程为1550m(大地高1517m)的高斯投影坐标作为本工程的独立坐标系。边长变形值计算:
(1)高斯投影变形计算
测区左端和测区右端Y坐标-500000后最大绝对值约为2660m,因此有:
(3)边长变形之和
?驻S和=?驻S高斯+?驻S高程=-15.6 mm/km~15.8mm/km
因此整个测区内边长变形值均不大于《城市测量规范》CJJ/T 8-2011规定的25mm/km要求。
2.5 独立坐标系像控点成果计算
根据独立坐标系的定义计算像控点的坐标,计算成果见表4。
2.6 坐标高程转换关系计算
2.6.1 坐标转换
从工程独立坐标系的定义可知要将2000国家坐标系标准分带高斯坐标转换为工程独立坐标系坐标,应经过高斯换带计算,将标准分带高斯坐标转换为102°12′中央子午线高斯坐标,再放大到指定高程面上。其转换公式如下。
当测区有高程点时,应比较高程点高程与该点HEGM2008的差值,并根据此差值将所有点的HEGM2008换算到与已知高程点的系统一致高程值。
2.7 像控点实地判刺与RTK像控点联测。
在已知点上架设设RTK基准站,设定好投影中央子午线和已知点成果,连接好流动站,将流动站移到其它已知点检测,当检测值与已知值较差符合规范要求时就开始进行像控点联测。
在RTK指示下将流动站移动到室内选定的像控点成果附近,认真对照实地与谷歌地图的影像,判定无误后即可观测,观测要求按《全球定位系统实时动态测量(RTK)技术规范》CH/T2009-2010执行。
2.8 像控点实测成果与谷歌成果比较
像控点实测成果与谷歌地图成果比较结果见表5。
2.9 像控点实测高程计算
采用EGM2008全球重力场模型,通过各像控点和已知点的经纬度计算出各自的高程,成果见表6。
表中DG01为已知点,该点1985国家高程基准成果为1503.869,与EGM2008高程1504.389的差值为-0.52m,因此将表6中的高程减去0.52m就得到1985国家高程基准成果,再将此高程与测区拟合模型计算的高程比较可说明EGM2008高程的精度情况,比较结果见表7。
从表7中高程较差最大为0.454m,说明本测区EGM2008高程修正后基本上可满足规范规定的1:2000测图的像控点高程精度。
3 结论
通过实例验证谷歌地图在陈旧航摄影像的外业控制中能够起到以下的作用。
1)可以在室内较为准确地确定像控点;
2)可以根据室内得到的像控点成果,在RTK的指示下迅速准确地到达指定位置;
3)大大减小了外业判读难度;
4)可以将实测的像控点成果导入谷歌地图检查刺点的正确性。
[责任编辑:王楠]