基于RSSI测距的煤矿井下人员定位算法的改进
2016-02-22 20:46张亮唐超礼
科技视界 2016年4期
张亮 唐超礼
【摘 要】目前,基于RSSI测距的煤矿井下人员定位算法是国内外井下人员定位常用的一种算法。可是RSSI测距由于受到井下障碍物的隔离以及节点间的相互干扰等因素,常常导致测距产生误差较大,此时如果再用传统的简单点,构成四个定位三角小区,根据定位三角小区各个三角顶点归属的定位三角小区个数的不同,进行加权的求三角形质心的方法定位井下人员的位置时,可能偏差会比较大。针对这一问题,本文提出选取四个定位节定位算法,近而提高定位精度。
【关键词】RSSI测距;井下人员定位;三边定位;三角定位
0 引言
随着我国经济发展,对煤炭能源的需求越来越大,煤炭行业快速发展。目前,不论是国内,还是在国外,煤矿的作业环境基本都是在地下作业。相比较地上作业,矿井的地下作业环境恶劣,瓦斯、一氧化碳等有害气体的存在、煤矿井下岩石塌陷滑落等诸多不利因素给井下作业带来了诸多潜在危险。一旦发生事故,井下人员定位的精确性对井下人员救援工作的效率具有至关重要的作用。
现阶段,国内外井下人员定位系统中,普遍选用基于测距技术的人员定位算法。通过对接收到的信号中特定参数进行处理,来测定节点间的距离。现阶段常用的RSSI(Received Signal Strength Indication)测距就是目前比较成熟的一种基于测距技术的人员定位算法。测量出未知节点(井下工作人员)到三个已知节点(固定的)的距离,然后利用三边定位算法定位工作人员的位置。然而实际情况下,由于节点间的干扰,井下环境影响等,使得节点间的实测距离有一定偏差,最终导致三边测量无法实现,进而采用三角定位算法。
1 传统RSSI人员定位介绍
1.1 RSSI测距
传统的RSSI人员定位算法的基础是RSSI测距(Received Signal Strength Indication)技术。也就是通过接收到的信号强度计算出节点间的距离。其中,接受到的信号强度与节点间的距离满足关系式:
[RSSI]=A-10nlgd
关系式中,A为信号传输1m时,接收端接收到的信号功率,单位为dBm。上式中,n为路径损耗指数,表示信号传输过程中,随路径增加而衰减的速度。A与n都是与环境相关的参数,在不同的环境下,A与n的值是是不同的。相对于一个特定的环境下,可以认为A与n是相对固定的值。d为信号发送节点与信号接收节点间的距离。当在某个特定环境下将A、n确定后,接收到的信号强度和收、发节点间距离d便是一一对应关系,通过接收到的信号强度值便可以由上式计算出收、发节点间的距离d。
1.2 三边定位算法
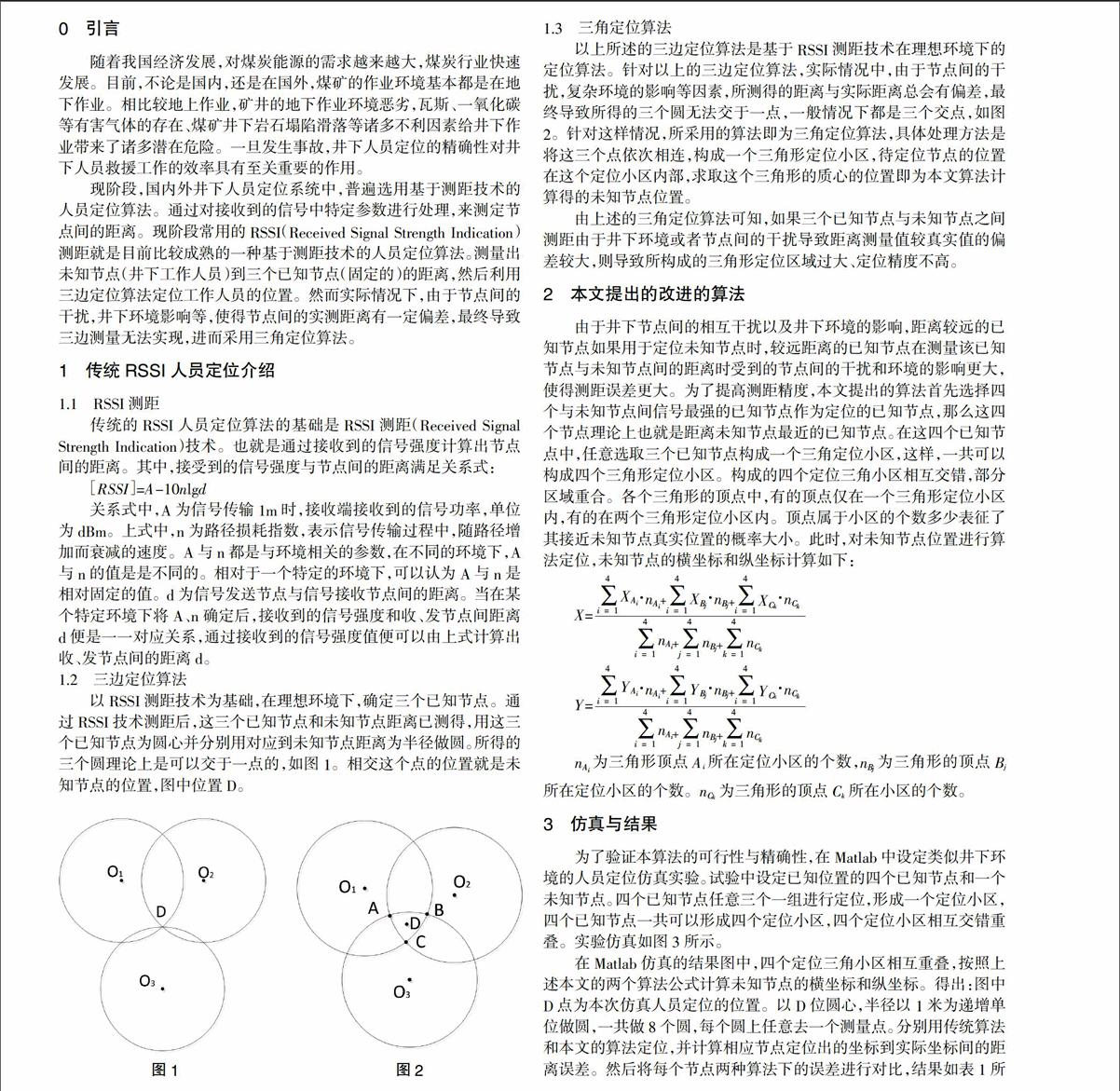
以RSSI测距技术为基础,在理想环境下,确定三个已知节点。通过RSSI技术测距后,这三个已知节点和未知节点距离已测得,用这三个已知节点为圆心并分别用对应到未知节点距离为半径做圆。所得的三个圆理论上是可以交于一点的,如图1。相交这个点的位置就是未知节点的位置,图中位置D。
1.3 三角定位算法
以上所述的三边定位算法是基于RSSI测距技术在理想环境下的定位算法。针对以上的三边定位算法,实际情况中,由于节点间的干扰,复杂环境的影响等因素,所测得的距离与实际距离总会有偏差,最终导致所得的三个圆无法交于一点,一般情况下都是三个交点,如图2。针对这样情况,所采用的算法即为三角定位算法,具体处理方法是将这三个点依次相连,构成一个三角形定位小区,待定位节点的位置在这个定位小区内部,求取这个三角形的质心的位置即为本文算法计算得的未知节点位置。
由上述的三角定位算法可知,如果三个已知节点与未知节点之间测距由于井下环境或者节点间的干扰导致距离测量值较真实值的偏差较大,则导致所构成的三角形定位区域过大、定位精度不高。
2 本文提出的改进的算法
由于井下节点间的相互干扰以及井下环境的影响,距离较远的已知节点如果用于定位未知节点时,较远距离的已知节点在测量该已知节点与未知节点间的距离时受到的节点间的干扰和环境的影响更大,使得测距误差更大。为了提高测距精度,本文提出的算法首先选择四个与未知节点间信号最强的已知节点作为定位的已知节点,那么这四个节点理论上也就是距离未知节点最近的已知节点。在这四个已知节点中,任意选取三个已知节点构成一个三角定位小区,这样,一共可以构成四个三角形定位小区。构成的四个定位三角小区相互交错,部分区域重合。各个三角形的顶点中,有的顶点仅在一个三角形定位小区内,有的在两个三角形定位小区内。顶点属于小区的个数多少表征了其接近未知节点真实位置的概率大小。此时,对未知节点位置进行算法定位,未知节点的横坐标和纵坐标计算如下:
nAi为三角形顶点Ai所在定位小区的个数,nBj为三角形的顶点Bj所在定位小区的个数。nCk为三角形的顶点Ck所在小区的个数。
3 仿真与结果
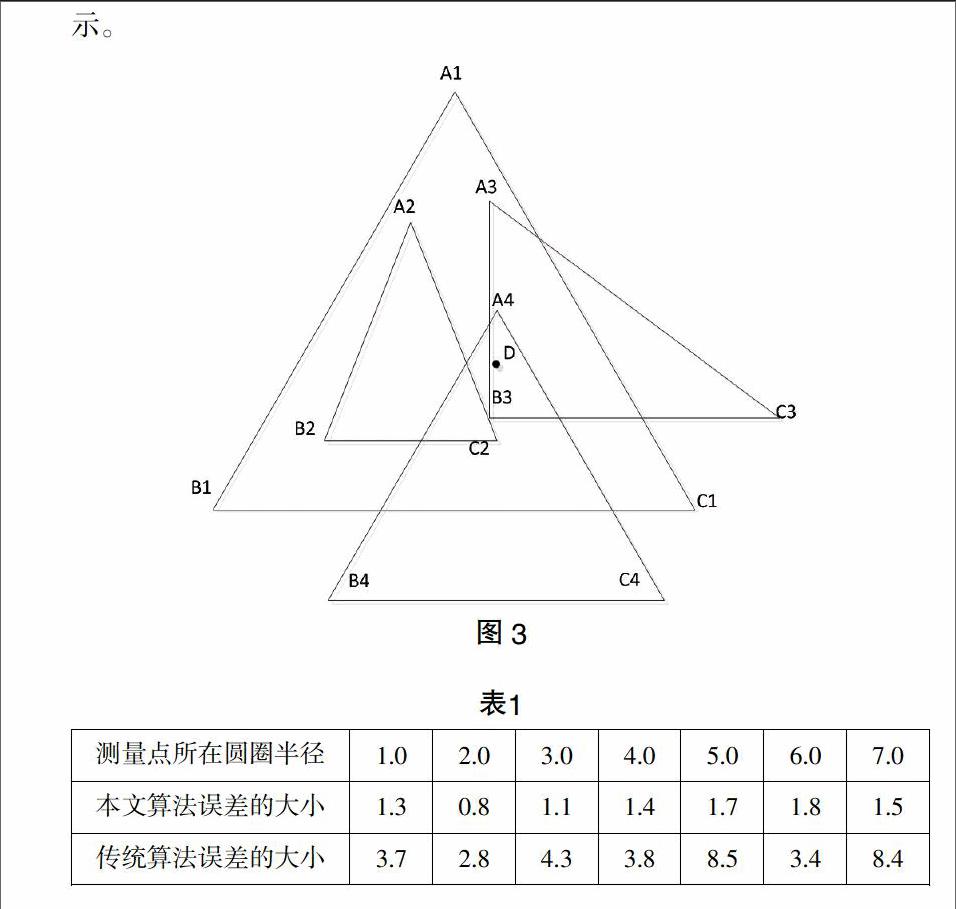
为了验证本算法的可行性与精确性,在Matlab中设定类似井下环境的人员定位仿真实验。试验中设定已知位置的四个已知节点和一个未知节点。四个已知节点任意三个一组进行定位,形成一个定位小区,四个已知节点一共可以形成四个定位小区,四个定位小区相互交错重叠。实验仿真如图3所示。
在Matlab仿真的结果图中,四个定位三角小区相互重叠,按照上述本文的两个算法公式计算未知节点的横坐标和纵坐标。得出:图中D点为本次仿真人员定位的位置。以D位圆心,半径以1米为递增单位做圆,一共做8个圆,每个圆上任意去一个测量点。分别用传统算法和本文的算法定位,并计算相应节点定位出的坐标到实际坐标间的距离误差。然后将每个节点两种算法下的误差进行对比,结果如表1所示。
图3
表1
实验结果表现为在八组数据中,传统算法的误差相比较本文提出的改进后的算法的误差普遍偏大,而且传统算法相比较本文的算法测量误差相对波动性也更大一些。可见,本文提出的改进后的算法定位未知节点的精度更高,定位的误差的稳定性也更好点。
【参考文献】
[1]孙晶晶.基于ZigBee的井下人员定位技术研究[D].燕山大学,2013.
[2]张程远,董增寿.基于RSSI测距的井下人员定位算法改进[J].太原科技大学学报,2014,05:323-327.
[3]张鹤丹.基于WiFi技术的井下人员定位系统研究[D].西安建筑科技大学,2013.
[4]徐丽.基于RFID的矿井人员定位系统的设计[D].太原理工大学,2013.
[责任编辑:王楠]