用DSP实现三相SPWM波形设计
2016-02-22 20:25易韬韦文斌
科技视界 2016年4期
易韬 韦文斌

【摘 要】本文叙述了三相全桥电压型逆变器SPWM生成方法,介绍了TI公司的控制用芯片TMS320F2812,描述了使用时间管理器EV生成三相对称SPWM的方法。最后给出实验波形,结果表明,输出波形光滑,失真率低。
【关键词】TMS320F2818;SPWM;事件管理器
【Abstract】This paper introduced method to generate the three-phase full-bridge voltage inverter SPWM Modulation principle and TMS320F2812 chip. It described the use EV generates three-phase SPWM mothod.Finally the experimental results were illustrated, the output waveform is smooth and scale distortion is low.
【Key words】TMS320F2812; SPWM; Event Manager
0 前言
随着交流异步电机的应用日益广泛,交流伺服驱动成为现代伺服驱动的主流方向,正弦脉宽调制技术SPWM是逆变技术的核心。早期通过模拟电路和数字电路硬件产生SPWM,虽然波形稳定精确,但结构过于复杂、参数修改麻烦。现在主流的控制方式是通过单片机等微控制器实现SPWM的控制,随着信息化的迅速发展,需要处理的数据量的增大,对实时性和精度也提出了更高的要求,越来越多的用户开始选用DSP来提高产品的性能。
本文介绍一种DSP处理器TMS320F2812实现SPWM信号的生成,并将产生的SPWM应用于三相逆变电源。
1 SPWM生成方法
将正弦波分成N份,可以将正弦半波视为N个相连的脉冲序列所成的波形,并且这些脉冲宽度都为?仔/N,幅值按正弦规律变化。根据面积等效原理,冲量相等而形状不同的窄脉冲加在具有惯性的环节时的效果相同。可以用数量相同的等幅不等宽的矩形脉冲代替正弦波,且矩形脉冲和相应正弦波部分冲量相等。三相桥式逆变电路如图1所示,采用的是双极性控制方法,其调制的原理如下。U、V、W三相调制信号urU、urV、和urW依次相差120°,且共用一个三角波载波uc。以U相为例,当urU>uc时,给上桥臂V1导通,下桥臂V4关断,电压UUN'=Ud /2。当urU 图1 三相桥式逆变电路 2 程序算法 根据SPWM的控制原理,在正弦波和三角波的交点时刻控制开关器件的通断,这种生成SPWM的方法称为自然采样法。这种方法虽然波形最接近正弦波,但要求解复杂的超越方程,因此工厂上应用不多。规则采样法是一种应用较为广泛的方法,图2为规则采样法原理图。在三角波负峰值时刻tD对正弦波采样得到D点,在D点作水平直线交三角波于A、B点,则tA时刻和tB时刻控制开关器件的通断。 设正弦调制信号波为: u=asin?棕t(1) 根据图3可知: ■=■(2) 脉冲宽度为: ?啄=■(1+asin?棕tD)(3) 式中a为调制度(0 图2 对称规则采样法 3 系统的硬件和软件设计 3.1 波形生成的方法 以U相为例,假设三角载波幅值为Ur,周期为Tr,频率为fr。正弦调制信号波为u=asin?棕t。载波频率fc和调制信号fr之比为载波比N=fc/fr。载波比N越大,输出波形越趋向于正弦波。在三相PWM逆变电路中,为了使三相输出波形严格对称,必须取采用同步调制方式,并且载波比N为3的倍数。根据以上原则,取N=120,a=0.8。载波频率为6kHZ,正弦波频率为50HZ。根据?啄=■(1+asin?棕tD),其中tD为采样时刻。 由此可见,DSP需要满足以下几个功能:连续增/减计数模式;比较和捕获。 连续增/减计数模式:在给定初始值后,定时器先从初始值递增到周期寄存器的值,在递减直零,然后再从零开始递增到周期寄存器的值,不断循环下去。 比较:当定时器数值变化时,其数值与比较寄存器数值相等时,通过引脚输出电平变化,产生PWM波形。 捕获:通过一个引脚输入捕获脉冲触发,将计数器的值读入捕获寄存器并申请中断。用来测量脉冲宽度。 由于三相全桥电路同一桥臂的两个开关不能同时导通,否则会造成电源短路。所以DSP还必须有死区控制PWM电路功能。 3.2 TMS320F2812的EV模块简介 TMS320F2812是美国TI公司推出的定点32位DSP芯片,运行时钟150MHZ,处理信息能力150MIPS,I/O口丰富,最突出的优点的是具备事件管理器EV(Event Manager)。它具有2个16位的通用定时器(通用定时器1和通用定时器2),3个比较单元(比较单元1、比较单元2、比较单元3),3个捕获单元(捕获单元1、捕获单元2、捕获单元3)以及正交编码脉冲电路(QEP电路),其中每个比较单元可以产生一对互补的PWM波,三个比较单元生成6路PWM波可以驱动一个三相全桥电路;捕获单元通过捕获输入脉冲的上升沿或下降沿测量出信号的时间间隔,利用六个边沿检测单元测量外部信号的时间差,从而确定电机的转子转速;正交编码电路可以对输入的正交脉冲进行编码和计数从而得到旋转机械部件的速度、位置等信息。因此TMS320F2812适合用于工业控制和电机控制等领域。
3.3 硬件设计方法
定时器T1CON有四种计数模式(保持/停止模式;连续增/减计数模式;连续增计数模式;定向增/减计数模式)定时器T1工作模式取决于T1控制寄存器的第12位TMODE1和第11位TMODE0。为了得到三角波作为载波信号,令定时器T1控制寄存器T1CON取TMODE的值为1,定时器T1工作与连续增/减计数模式。
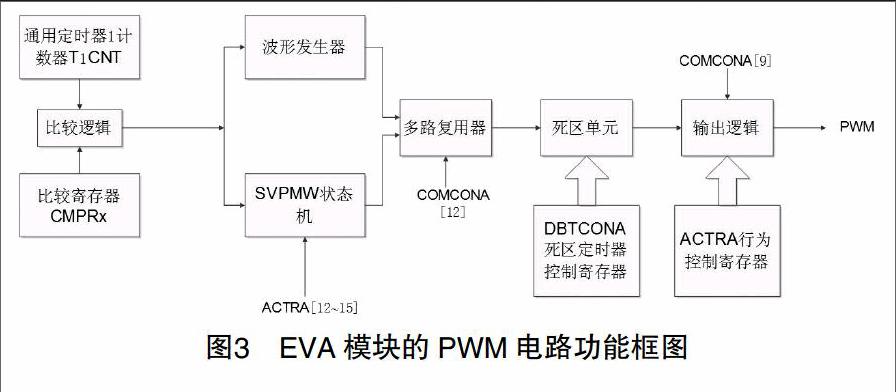
EVA模块的PWM电路框图如图3所示,事件管理器EVA模块有三个全比较单元,分别是比较单元1、比较单元2、比较单元3,它们的时钟信号由通用定时器1来提供。每个比较单元能输出一对互补的PWM波形,使得EVA能驱动一个三相全桥电路。当通用定时器1计数器T1CNT与比较单元中的比较寄存器CMPRx(x=1,2,3)相等时,这是波形发生器改变引脚电平状态,形成上升沿或下降沿,产生一对互补的PWM波形PHx和PHx_”(x=1,2,3)。通过死区单元设置死区,使得波形之间具有死区时间。最后输出逻辑电路决定输出的波形状态。得到的具有死区时间的DTPHx和DTPHx_(x=1,2,3)。
图3 EVA模块的PWM电路功能框图
3.4 软件设计方法
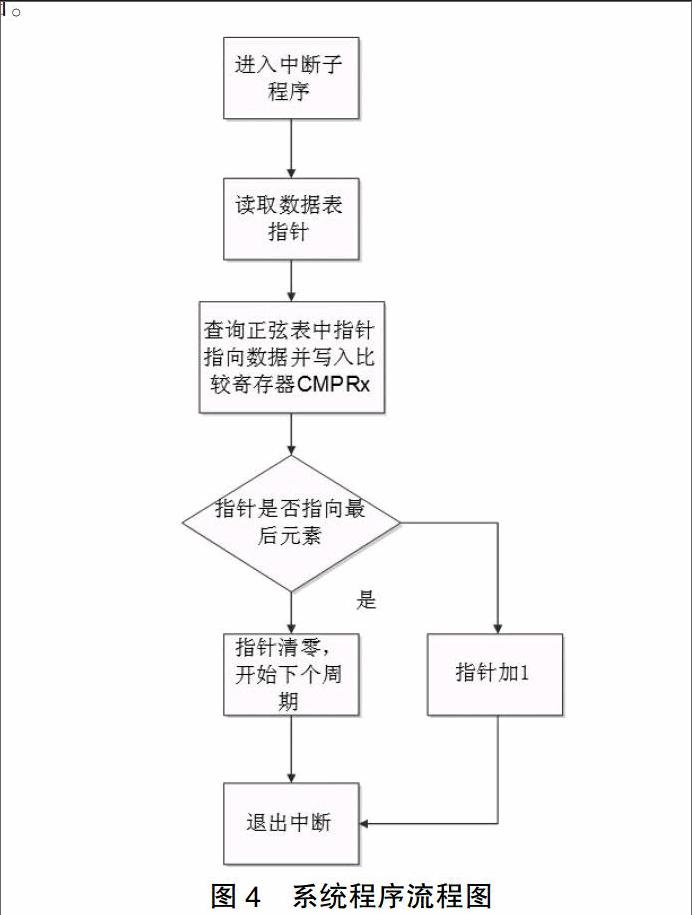
主程序在系统初始化后根据式(3)计算出每个三角波中的脉冲宽度,形成正弦表,等待中断标志位的响应。当三角波周期到来前,将中断子程序所得到的值分别送入比较寄存器CMPRx(x=1,2,3)中,使他们和通用计数器TICNT进行比较,产生SPWM波形。图4为系统程序流程图。
图4 系统程序流程图
4 实验结果和结论
通过编写好的程序下载至DSP开发板中并用示波器测量PWM1和PWM2引脚,波形稳定毛刺不明显,并且互补的两路PWM间隔完全可以保证所需的死区时间,PWM波占空比以正弦规律变化。经过LC滤波后输出正弦波形,符合SPWM的调制规律,失真率低。
本研究利用了TMS320X2812的EV模块,结合规则采样法,实现了电压型三相全桥逆变器的SPWM生成。实验结果表明,输出波形光滑。电路结构简单,成本低廉,非常适合低成本高可靠性的应用场合。
【参考文献】
[1]吴莹,陈延明,沈祺钢.基于DSP的SPWM波设计与实现[J].DSP开发与应用,2008:2.
[2]王兆安,刘进军.电力电子技术[M].
[3]苏奎峰.TMS320F2812 DPS原理与应用实例[M].
[责任编辑:王楠]