
星敏感器技术研究现状及发展趋势
2016-02-26 02:55朱海龙仝玉婵
中国光学 2016年1期
梁 斌,朱海龙,张 涛,仝玉婵
(1.清华大学 自动化系,北京 100084;
2.中国运载火箭技术研究院 物流中心,北京 100076)
星敏感器技术研究现状及发展趋势
梁斌1*,朱海龙1,张涛1,仝玉婵2
(1.清华大学 自动化系,北京 100084;
2.中国运载火箭技术研究院 物流中心,北京 100076)
摘要:本文综述了星敏感器技术的研究现状和未来发展趋势。首先,总结了国内外星载星敏感器的发展历程。接着,根据星敏感器工作原理,分析讨论了星点质心定位算法、星图识别算法和姿态解算算法等星敏感器关键技术的发展现状。通过讨论星点质心定位精度对星敏感器测量精度影响,分析了星点质心定位算法以及对应误差补偿的研究现状;基于星座特征、字符模式和智能行为,介绍了星图识别算法并进行了对比分析;根据确定姿态解算算法和动态姿态解算算法分析了姿态解算算法的研究现状。最后,对星敏感器的未来发展进行了展望,讨论了航空机载星敏感器、微小型星敏感器和甚高精度星敏感器的发展趋势以及未来重点研究内容。
关键词:星敏感器;星点提取;星图识别;姿态解算
Research status and development tendency of
1引言
星敏感器是最常用的姿态确定仪器之一,相对于太阳敏感器、磁强计、地平仪和陀螺仪等其他常见的姿态测量设备而言,星敏感器不仅姿态测量精度比较高,而且能够实现自主导航能力,抗干扰能力也比较强[1],目前是卫星等航天器上最主要的姿态测量仪器,在导弹、飞机和舰船上也有应用。
星敏感器技术研究开始于20世纪50年代,截止到目前为止,已经研制出很多不同类型的星敏感器产品并且被成功应用。美国、德国、法国、丹麦和意大利等国家的航空航天产品研发机构研制出诸多应用于不同环境的星敏感器产品,其中有部分产品的姿态定位精度已经达到1″甚至更高。国内星敏感器技术的研究开始于20世纪80年代后期,经过多年的积累和发展,国内许多科研院所和高校也研制出成功应用于航天和航空的星敏感器产品,但是相对于国外研制的星敏感器仍然有很大的差距。本文通过整理国内外星敏感器发展历程以及关键技术的研究现状,分析星敏感器技术的发展趋势,为国内星敏感器研究人员提供一些可参考的思路。
2星敏感器发展历程
根据应用环境的不同,星敏感器主要分为弹载星敏感器和星载星敏感器两类。
2.1 国外弹载星敏感器技术发展历程
星敏感器通过跟踪视场内某一固定的恒星实现对飞机和导弹的制导,此类星敏感器可以称为弹载星敏感器。弹载星敏感器通过校正弹载惯性导航系统误差,形成弹载惯性/天文组合导航系统,提高导弹的导航精度。其中典型代表是法国SODERN公司研制的SED20星敏感器,如图1所示。SEND20星敏感器是专门为M51弹道导弹设计的。

图1 SED20星敏感器图Fig.1 Photo of SED20 star tracker
无论是早期的“三叉戟”I、“三叉戟”II型弹道导弹和SS-N-8导弹,还是新型的“三叉戟”II-D-5型潜射导弹、“侏儒”地地战略弹道导弹、“三叉戟”II洲际弹道导弹和“民兵”III地地导弹,都采用了弹载星敏感器技术修正惯性导航系统带来的误差。
2.2 国外星载星敏感器技术发展历程
星载星敏感器指应用于卫星平台的星敏感器,截止到目前经历了3个阶段的发展历程。第一代星载星敏感器是在CCD图像传感器研制成功后出现的CCD星敏感器,典型的代表美国喷气动力试验室(JPL)研制的ASTROS星敏感器,其主要性能参见表1。此时的星敏感器成功解决了星图成像稳定性的问题,能够在视场范围内同时捕获多颗恒星,提高了姿态测量精度和可靠性。但此时的CCD星敏感器选用小视场长焦距的光学成像系统,导致星敏感器的体积、质量和功耗都较大,而且不具备独立自主获取姿态的能力。第二代星载星敏感器出现在20世纪80年代中期后,此时的星敏感器采用成熟的大面阵CCD作为图像传感器,典型的代表产品有美国Ball aerospace公司研制的CT-601星敏感器和德国Jean-Optronik公司研制的ASTRO-10星敏感器,如图2所示,主要性能参数如表2所示。相对于第一代星敏感器,第二代星敏感器采用新工艺和新技术,降低了体积、质量和功耗,提高了星敏感器抗杂散光和空间辐射能力,具备了独立自主导航能力。第三代星敏感器出现在20世纪90年代后,此时的星敏感器采用CMOS APS图像传感器作为成像器件,典型的代表产品有意大利Gelileo avionica公司研制的A-STR星敏感器和德国Jean-Optronik 公司ASTRO APS星敏感器,如图3所示,其主要参数如表3所示。

表1 ASTRO星敏感器性能参数

图2 CT-601星敏感器和ASTRO-10星敏感器Fig.2 CT-601 star tracker and ASTRO-10 star tracker

表2 CT-601和ASTROA-10星敏感器性能参数

图3 A-STR星敏感器和ASTRO-APS星敏感器Fig.3 A-STR star tracker and ASTRO-APS star tracker
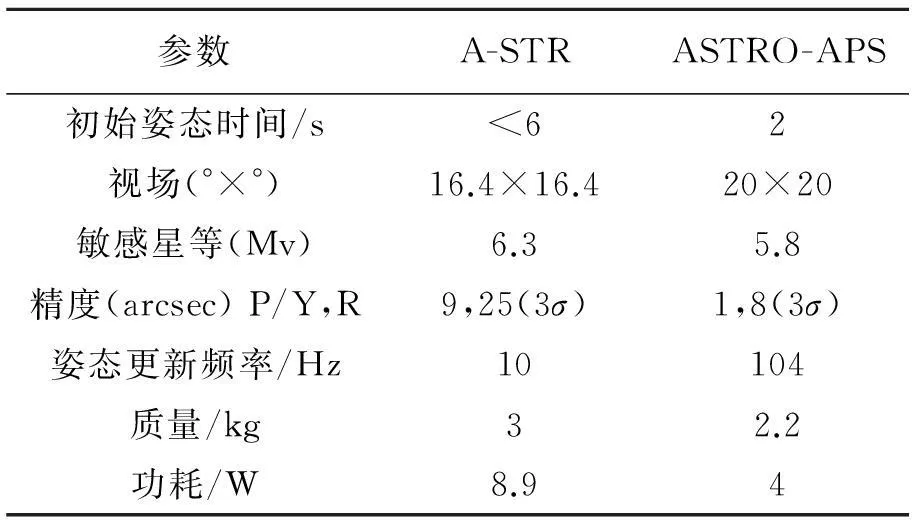
表3 A-STR和ASTRO APS星敏感器性能参数
相比于CCD星敏感器,APS星敏感器可以设计大视场光学结构,在探测星等比较低的情况下,也能保证视场内有足够数量的恒星可以识别,可以减小导航星库的大小和提高导航星库的搜索速度,提高姿态更新的速率。
2.3 国内星敏感器技术发展历程
国内对星敏感器技术的研究起源于1980年之后,主要的研究机构包括北京控制工程研究所、清华大学、北京航空航天大学、哈尔滨工业大学和中国科学院下属研究机构等。北京控制工程研究所是国内研究星敏感器比较早的单位,具有丰富的理论研究成果和产品体系,在星敏感器理论方法研究、软硬件设计和产品研制方面都处于国内领先水平,其星敏感器产品已经具有多年成功在轨运行经验[2]。清华大学经过多年的积累,在高精度质心提取、快速星图识别、姿态解算和地面标定等星敏感器研究方面取得了丰富的研究成果,研究成果曾获得国家技术发明二等奖。北京航空航天大学从20世纪90年代开始开展小型高精度星敏感器技术研究,经过多年的积累,在星敏感器光学成像系统、星图处理专用芯片装置、质心跟随成像系统、全天球星图快速识别方法和姿态实时跟踪方法等方面取得了丰硕的研究成果,研究成果“小型高精度天体敏感器技术”获得了2008年度国家技术发明一等奖。哈尔滨工业大学在星敏感器光学设计、星图识别和姿态确定算法等领域取得了丰富研究成果。中国科学院的多家研究机构也从事星敏感器技术研究,包括长春光学精密机械与物理研究所、光电技术研究所、西安光学精密机械研究所和北京天文台等机构。经过20多年的发展,国内在星敏感器理论方法研究方面取得了巨大的进步,也具备产品设计和研发的能力。但是无论硬件设计还是软件算法,国内的星敏感器跟国外相比仍然有一定的差距。因此,国内的星敏感器技术研究仍然有很大的价值和意义。
3星敏感器关键技术及研究现状
图4给出了星敏感器的工作原理示意图,星敏感器通常包含全天球识别工作模式和星跟踪工作模式。在全天球工作模式下,星敏感器通过光学镜头在视场范围内拍摄得到星图,经过星点质心定位、星图识别和姿态解算等步骤之后,直接输出姿态信息。在星跟踪模式下,星敏感器利用先验姿态信息,进入星跟踪算法模块,通过局部的星点质心定位和识别最终解算出当前姿态信息。从图中可以看出,星敏感器关键技术主要包括星点质心定位、星图识别和姿态解算等,这些也是研究人员重点关注和研究的部分。
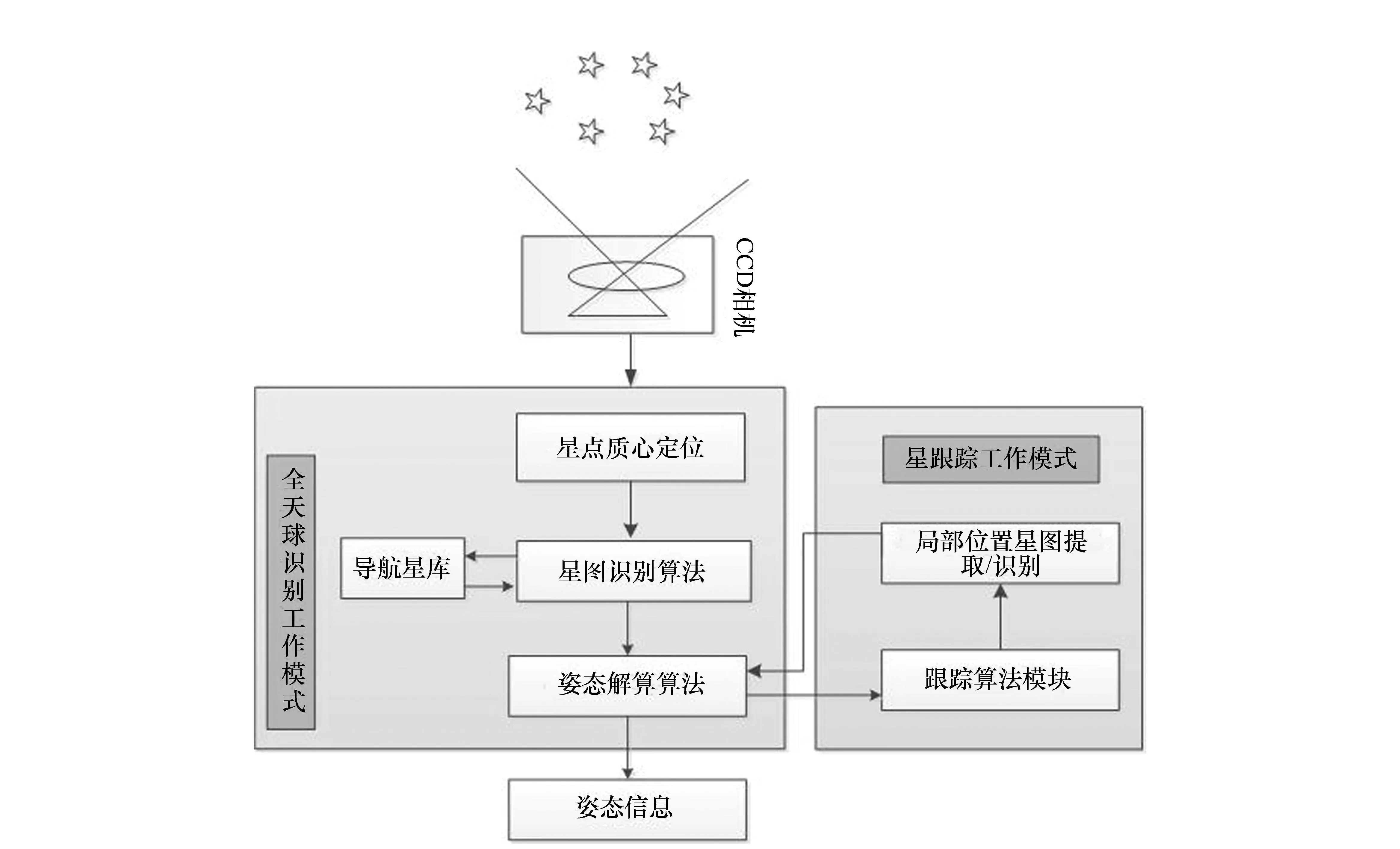
图4 星敏感器工作原理示意图Fig.4 Sketch map of the principle of stat tracker
3.1 星点质心定位算法
星点质心定位指计算恒星在星图中准确位置的过程。质心定位的精度不仅直接影响星敏感器的姿态测量精度,而且间接影响星图识别成功率[3]。图像传感器单个像元的角分辨率δ可以表示为:
(1)
式中,θ是视场角大小,NCCD是图像传感器面阵像元数目。为了提高单个星点的姿态测量精度,星敏感器的光学镜头采用散焦技术,使得接收到的星点能量可以弥散到图像传感器多个像元上,如图5所示。

图5 离焦后单个星点成像示意图Fig.5 Sketch map of defocus star spot
Stone综述了多种图像质心定位算法[4],讨论分析了质心法、中值法、高斯曲面拟合法和倒数搜索法等质心定位算法,并且针对质心法的不足,提出基于阈值的质心定位算法,这种质心法最适合背景噪声比较大的星图星点质心提取。Shortis等人对离散目标图像的亚像元定位的方法进行了详细的对比分析[5]。魏兴国等人讨论了质心法、改进质心法、高斯曲线拟合法和抛物面拟合法在星点提取中的应用[6],李玉峰等人提出了二元线性插值法用于星点提取[7]。根据国内外研究成果,目前星点质心定位的精度可以达到0.05 pixel左右。
在星图成像过程中,诸多的噪声因素会影响质心定位的精度,影响星点质心精度的因素可以分为系统误差和随机误差两种类型。其中系统误差包括亚像元细分定位算法误差和光学系统误差。 亚像元细分定位算法误差是指利用亚像元细分定位算法计算星点提取时产生的系统误差。Grossman首先分析了亚像元细分定位算法系统误差对星点提取精度影响[8],指出系统误差随像点模糊程度增大而减小。像点模糊程度由CCD离焦产生,即增大离焦量,使星点弥散在尽量多的像元上,可减小细分算法系统误差。Stanton使用修正的质心法确定星点质心位置,在某个特定的离焦量下,得到了质心法系统误差跟真实星点位置之间存在正弦周期性关系[9]。Hegedus也得到了质心法系统误差跟真实星点位置之间的正弦关系,但是随着星点弥散斑高斯半径的增大,这种误差关系由正弦关系逐渐变成了近似线性关系[10]。Alexander等人首次对星点质心定位的系统误差进行了频域分析,建立了系统误差频域解析模型[11]。这个模型避免了时域分析中的信息缺失,通过解析式在理论上验证了星点质心定位系统误差随像点弥散半径增大而减小的现象,但是Alexander建立的模型是基于像点能量符合对称分布的假设条件上的,没有考虑质心提取窗口有限采样情况质心法系统误差跟真实星点位置的关系表达式。Rufino详细的分析亚像元细分定位算法的系统误差和随机误差,建立随机噪声和系统噪声简化模型[12],针对星敏感器对质心定位算法进行了改进,提出了前馈BP神经网络的算法对误差进行补偿,星点位置的精度可以达到0.001 pixel级别。
随机误差主要指成像过程中的噪声产生的误差。Gilliland详细分析了星敏感器中随机噪声来源和机理[13]。Snyder将读出噪声用泊松过程来近似,提出了对应的补偿算法[14]。Holst将CCD产生的随机噪声分为散粒噪声、暗电流噪声、复位噪声、读出噪声和光子非均匀性响应噪声等5类,并且建立了对应的数学模型[15]。Hancock[16]和张辉[17]等人都给出了上述几种不同类型噪声对于星点质心提取精度的影响函数,提出了针对性的噪声消除补偿算法。
星点质心提取的精度是整个星图处理部分的基础,决定了星敏感器的测量精度。在复杂环境下得到准确的星点定位也是目前亟需解决的问题。
3.2 星图识别算法
星图识别算法分为以下三类:(1)基于星座特征的星图识别算法;(2)基于字符模式的星图识别算法;(3)基于智能行为的星图识别算法。
基于星座特征的星图识别算法是利用恒星之间相互位置关系组成特征进行识别的算法。最早是20世纪70年代Junkins提出的三角形算法[18],该算法比较直观,也是目前工程中最经常使用的星图识别算法,算法的核心思想是用由观测恒星构成的三角形特征与导航星座数据库中的同构三角形匹配。Liebe、Quine和Douma设计了改进的三角形星图模式识别算法。Liebe根据视场大小和亮星的数量,选取所有能构成的三角形恒星进行识别[19];Quine首先选取视场内最亮星作为主星,然后在主星周围的圆形区域内选取两颗最亮的星同主星构成星三角[20];Douma同Liebe的方法类似,但他考虑了视场内恒星形成三角形的概率,只选取概率最大的三角形[21]。与单纯使用星角距作为特征的星图识别算法相比,三角形算法的优点是具有更多的特征维数,减少误匹配的概率,便于建立导航星库索引方式,缩短导航星库的搜索时间,提高星图识别的速度。三角形识别算法的缺点是在星三角形数量较多时,会出现冗余匹配或者误匹配,降低识别成功率。Mortari提出了基于k-vector方法的Pyramid识别算法[22]。k-vector方法可以快速初始定位,减少导航星表搜索次数,提高星图识别速度。Pyramid算法以四面体为识别特征,选择了4颗观测星,以1颗星为顶点,其余3颗星为三角形来构成一个四面体,以k-vector方法为导航星库搜索算法,可以实现在噪声和伪星点比较多的情况下快速的识别出导航星。该算法的缺点是随着星对信息表增加,导致拟合曲线精度降低,不能确保最佳匹配星对落在角距误差范围内。张广军使用线型数据库搜索的方式,对Liebe的算法进行了修正,提高了算法的速度[23]。
基于字符模式的星图识别算法。Padgett等人提出了网格算法[24]。该算法将星坐标映射到一个稀疏矩阵上,给星图识别提供了新的思路。网格算法具有存储量很小、识别速度快、算法对星敏感器的测量误差不敏感等优点。但是当恒星位置误差或者星等误差比较大的情况下,网格算法的识别率会迅速的下降。孟娜提出了对网格算法的改进算法[25],提出“弹性灰度网格算法”,在识别过程中增加一个虚拟的弹性模板。该算法显著的提高了对于星等和噪声误差的容错能力,提高识别率。Hyunjae Lee也提出了改进的栅格星图识别算法[26],他采用圆形栅格代替原始算法的正方形栅格,不仅克服了原始栅格算法对参照星的依赖,而且使改进算法对图像旋转环境有很强的鲁棒性,并且引入虚拟栅格,增大了选择模式的空间,在星图识别成功率上有很大提高。李葆华等人提出了KMP星图识别算法,是栅格算法的另一种表示形式,他将采集到的星图经过高通滤波后,直接生成0-1字符串形式匹配模式,再利用KMP字符串搜索算法进行星图字符串识别。由于原始图像字符串存储容量过大,又提出了基于小波变换的改进KMP算法[27]。
基于智能行为的星图识别算法是随着人工智能技术的快速发展而产生的。Hong将神经网络引入星图识别,提出了基于模糊神经网络的星图识别方法[28]。该算法基于三角形的三个角距特征,将挑选的导航三角形库进行神经网络学习,利用学习后神经网络结构识别星图。神经网络识别算法有识别率高、识别速度快的特点,缺点是学习速度慢、存在一定的误识别概率。与传统的算法比较,神经网络算法具有数据存储量低、实时性和鲁棒性好等优点。但是需要大量的样本集进行训练,识别的精度受到训练集大小和训练时间的影响,对硬件的要求也比较高。McClintock首次将遗传算法引入星图识别[29],对基于遗传算法的星图识别方法进行了初步研究,Paladugu深入研究了遗传算法在星图识别中的应用,提出了改进的基于遗传算法的星图识别方法[30]。选定一颗主星,对主星跟伴星间的星对角距和星与星之间的夹角进行编码,定义两组星图对应的星角距误差和夹角误差和为适应度函数,将搜索分为粗定位和细定位两个阶段,在粗定位阶段变异因子适当大些,在细定位变异因子调小些。全伟等人使用了自适应蚁群算法(AAC)来实现星图识别[31]。
对比分析3种类型的星图识别算法,其优缺点总结如表4所示。类型1指基于星座特征的星图识别算法,类型2指基于字符模式的星图识别算法,类型3指基于智能行为的识别算法。目前在实际工程中,类型1是应用最多的算法,类型2和类型3的算法还没有得到广泛应用。
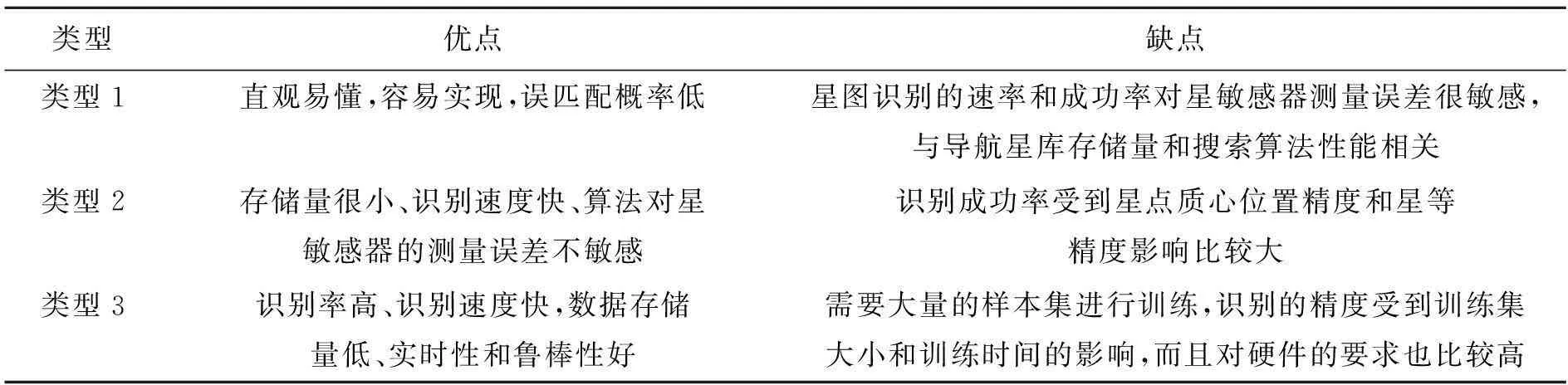
表4 星图识别算法性能对比分析
3.3 星敏感器姿态解算算法
根据具体计算方法的不同,星敏感器中常用的姿态结算算法可以分为静态确定性姿态解算算法和动态滤波估计算法。
3.3.1确定性姿态解算算法
确定性姿态解算算法是指根据一组矢量观测值,求出卫星本体坐标系相对于惯性坐标系的方向余弦矩阵。由确定性算法求解出来的结果具有明确的几何和物理意义,而且只需通过一次测量就可以得到卫星的瞬时姿态。所以静态确定性算法具有稳定性高、计算速度快、占用内存少等优点,也是目前星敏感器中主要使用的姿态确定算法。
但是直接求解Wahba问题比较困难,而且很难获得最优解。1968年,Davenport提出了q-方法,利用四元数参数化姿态矩阵,将Wahba问题转化为K矩阵的最大特征值求解问题,极大的推动了静态确定性姿态解算算法的发展。后来研究者又提出了TRIAD算法、Euler-q算法、QUEST算法和FORM算法等。Shuster指出利用TRIAD法求解时,在两个观测矢量测量精度不对等时将无法得到最优的结果[32]。Baritzhack提出利用两次TRIAD法进行加权处理得到更为准确的姿态矩阵的方法[33]。Markley从FOAM方法入手推导了目前形式最为简洁的双矢量观测情形下的闭合解形式,并且分析了该算法的方差[34]。
QUEST算法是最小二乘意义下的最优四元数估计,该算法最早应用于1979年的MAGSAT任务,也是目前解决Wahba问题的最常用算法。Shuster提出了QUEST测量模型并证明了其对于小视场敏感器是比较精确的[35],并利用QUEST测量模型推导了TRIAD法和QUEST法的方差阵,从理论上证明了QUEST法优于TRIAD法。
3.3.2动态滤波估计算法
在实际应用中,卫星轨道参数的测量误差和星敏感器的安装误差都会给观测矢量的测量带来不确定性的误差,而且这些误差很难克服。为了满足高精度姿态控制的需要,可以利用动态滤波估计方法来结算航天器的姿态信息。动态滤波估计方法是利用航天器根据姿态动力学方程,建立状态方程和观测方程,根据观测信息得到一定准则下的最优估计方法得到航天器的真实姿态。相对于静态确定性算法,动态滤波估计算法利用了更多的观测信息,能提供统计意义下的最优解,可以避免不确定因素对航天器姿态的影响,提高姿态确定的精度。
扩展卡尔曼滤波(EKF)算法是航天器最常用的实时姿态确定算法[36]。根据姿态参数的选取不同和观测量的不同形式,常见的有乘性扩展卡尔曼滤波(MEKF)和加性扩展卡尔曼滤波(AEKF),其中MEKF被广泛应用于各种航天器姿态确定任务并且发展最为成熟。但是EKF鲁棒性不强,易于发散,对于非线性特性较强的估计问题时常不能得到最优解。Julier和Uhlmann利用UT变换取代了局部线性化[37],提出Unscented卡尔曼滤波器(UKF),在初始误差较大的情况下,依然有良好的收敛性,得到比较优的结果。不管是EKF还是UKF算法,都是基于系统的随机部分服从高斯分布的假设条件上提出来的,在星敏感器的姿态动力学模型中存在有不确定性的力矩模型误差情况下,其结果的有效性难以保证。
基于QUEST算法,Shuster提出了滤波QUEST算法[38],该算法利用姿态分布矩阵B的传播实现了卡尔曼滤波的递推处理功能。Bar-Itzhack也对QUEST算法进行了扩展,提出RE-QUEST算法[39],通过K矩阵的传播来实现递推功能。从本质上来说,滤波QUEST算法和RE-QUEST算法在数学上是等效的。但是由于这两种算法的精度相对于EKF算法来说比较差,并没有在工程中广泛使用。近些年来,随着新的滤波估计方法的出现,越来越多的算法用在了星敏感器动态姿态估计中,如粒子滤波算法[40]、高斯滤波算法[41]和多模自适应估计算法[42]等。动态滤波估计方法的优点是可以利用先验的知识来逼近统计意义下的最优解,但是由于采用了非线性的方法,算法复杂性较高,在实际使用中尚有一定的困难。
无论是静态确定性姿态解算方法还是动态滤波算法都在星敏感器产品中得到了实践和应用。表5中对比分析了星敏感器姿态解算算法的特点。对于有陀螺的姿态确定系统,目前最实用也最常用的是乘性扩展卡尔曼滤波(MEKF)的方法,对于无陀螺的姿态确定系统,可以采用QUEST或者预测滤波估计的方法。
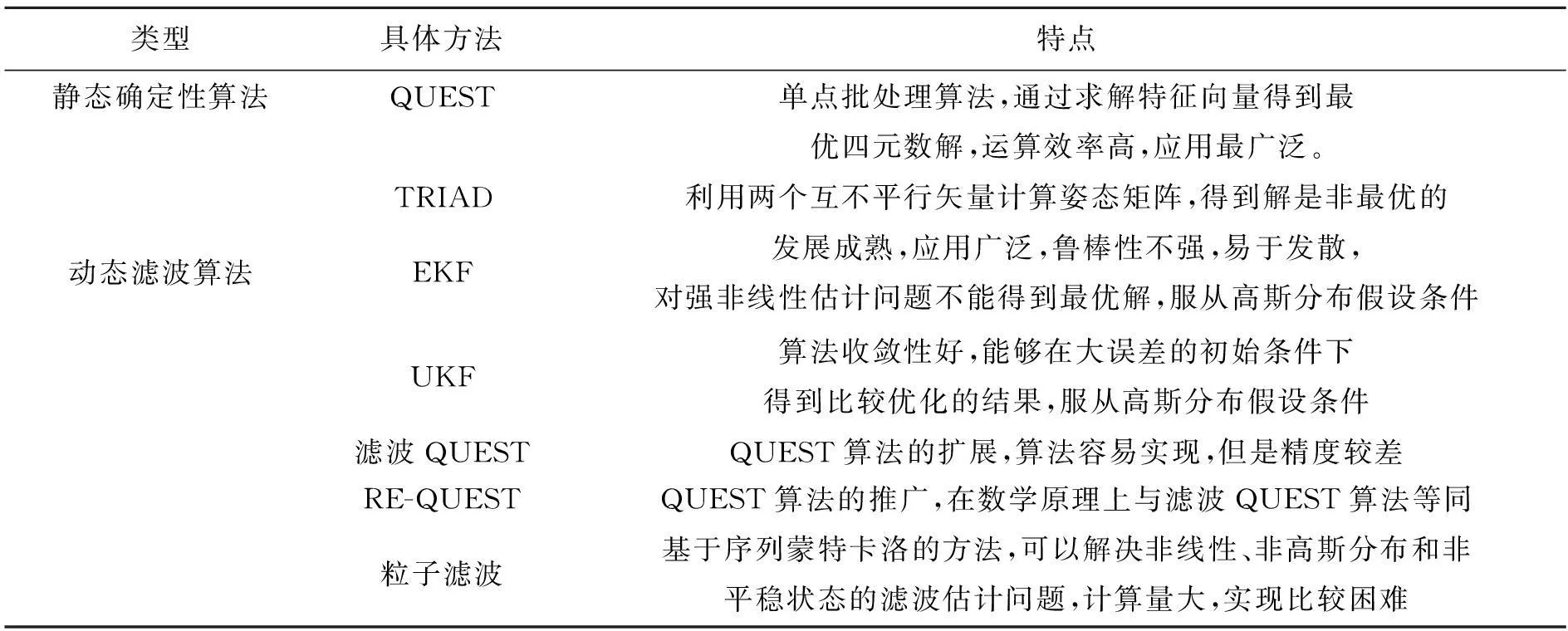
表5 星敏感器姿态解算算法对比分析
3.4 星敏感器在轨标定算法
星敏感器在轨使用之前,需要在地面利用标定实验设备对其误差进行严格标定和补偿。但是在进入在轨状态后,星敏感器会收到温度、振动和辐照等方面的影响,导致星敏感器的各项参数可能发生变化,因此需要对星敏感器进行在轨标定,保证其在轨运行期间能够保持高精度姿态测量精度。
Shuster.M.D.和Oh.S.D.等人最早研究姿态敏感器在轨标定,他们提出了基于姿态敏感器相对准线安装误差的在轨误差估计方法,虽然该算法模型粗糙,没有进行冗余校正,标定误差也比较大,但是实现了首次对姿态敏感器的在轨标定[38]。在此之后,许多学者开展了对陀螺和星敏感器等姿态敏感器的在轨标定方法研究。Samaan提出两种标定的方法[43],一种是使用目前测量的姿态信息采用标准非线性最小二乘最优估计的方法,另外一种是采用在轨迭代的方法来矫正焦平面的误差。D.Todd Griffith提出了依赖姿态的校正方法和不依赖姿态的局部拟合姿态校正算法[44]。北京控制工程研究所刘一武等人通过比较惯性姿态敏感器与星敏感器在轨标定的方法[45],给出了利用惯性姿态敏感器标定星敏感器的准则,基于现有在轨标定算法,重点分析了星敏感器焦距和主点的在轨标定算法,通过卡尔曼滤波处理连续星图,能够快速稳定高精度的在轨标定星敏感器内部参数。哈尔滨工业大学袁彦红等人提出基于卡尔曼滤波的星敏感器在轨标定算法[46],利用在轨姿态数据标定星敏感器参数。北京航空航天大学的魏新国等人提出了基于径向基准约束的在轨标定算法[47],利用相机标定的径向排列约束方法,对星敏感器的内部参数和外部姿态进行标定。国防科技大学的刘海波等人提出了基于最小二乘迭代的卡尔曼滤波在轨标定算法[48],可以标定在非线性相机模型下星敏感器的内部参数和外部姿态。
此外,恶劣的辐射环境下出现的伪星点、光学系统的畸变、色差和像散也会产生影响。Liebe对高能带电粒子对摄像机系统的影响进行了分析和模拟,详细分析了辐射环境下星敏感器的设计时需要考虑的因素[49]。Jérme MINEC-DUBé等人提出采用双积分和双星检测的算法来处理由于粒子辐射而造成的伪星点,并在SED 26星敏感器上进行了应用[50]。国内北京控制工程研究所的周建涛等人对星敏感器在空间环境中的效应进行了研究和分析[51]。
4星敏感器发展趋势
天文自主导航已经成为航天器技术中重要的领域,也是未来发展的主要趋势。作为高精度的姿态测量仪器,星敏感器必然有良好的发展和应用前景。总体来讲,航空机载星敏感器、微小型星敏感器和甚高精度星敏感器将是未来星敏感器主要发展方向。
4.1 航空机载星敏感器
目前,航空机载导航主要依靠惯性导航系统和GPS技术。惯性导航系统具有输出精度高和自主性强等优点,但其测量误差随着时间的增加而累计,在长航时飞行器使用中受到限制。GPS技术可以全天候高精度导航定位,并且修正惯性导航系统的漂移误差,但是GPS信号不稳定而且容易受到干扰,特别是在军事使用上受到了很大的限制。尽管已经有部分航空飞行器使用天文导航技术,但星敏感器仅是用来跟踪某一颗固定恒星来修正惯性导航系统的漂移偏差,并不具备独立自主导航的能力。因此把星敏感器可以作为独立姿态测量仪器引入机载导航设备中,以提高机载导航的精度和可靠性将是未来星敏感器发展的主要方向之一。由于受到大气层以及白天强烈天空背景辐射的影响,航空机载星敏感器的应用受到了极大的限制,提高航空机载星敏感器的白天测星能力、修正大气层带来的系统误差和提高机载星敏感器/惯性导航系统姿态输出精度是目前面临的几个亟需解决的问题。
利用多视场结构以及近红外光学探测方法可以提高航空机载星敏感器白天测星能力。在白天条件下,太阳光在大气层内的强烈背景辐射杂散光会严重降低航空机载星敏感器的探测信噪比。通过MODTRAN软件计算的结果,图6给出0.4~3 μm波长范围内大气透射率。从图中可以看出有几个近红外波段的大气透射率比较高,因此采用近红外波段的探测器件和探测方法航空机载星敏感器必然采用的设计方法。根据星敏感器姿态确定原理,至少要在视场范围内探测3~5颗恒星才能保证输出正确的姿态信息。强烈的杂散光使得航空机载星敏感器必须采用很小的视场,因此采用多视场结构,通过多个方向同时观测恒星,可以观测到足够的导航星。通过融合多个视场的星图,可以显著降低光轴方向姿态误差,使三轴同时达到较高的测量精度。

图6 0.4~3 μm波长范围内大气透射率Fig.6 Atmospheric transmittance between 0.4 μm to 3 μm
在快速飞行时,航空飞行器表面会形成大气湍流,进而在星敏感器探测视场产生气动光学效应。由于大气折射影响,机载星敏感器观测恒星的位置与实际位置有较大偏差。因此,需要修正由大气层带来的航空机载星敏感器的系统误差。气动光学效应对机载星敏感器的影响主要是造成星点成像的模糊和形变,现有气动光学效应补偿算法并不能有效解决这个问题,因此还需要在下一步的研究中针对星敏感器成像特性,通过理论和风洞试验结合的方法,建立有效的补偿模型,提高在气动光学效应下星点质心的定位精度。
利用数据融合组合算法解决机载星敏感器/惯性导航系统姿态解算问题。由于机载星敏感器的输出频率比较低,惯性导航系统姿态输出频率比较高,因此利用机载星敏感器和惯性导航系统进行系统组合导航时,传统的组合导航算法存在一定困难。利用数据融合组合算法,建立在不同姿态输出频率状态下的姿态解算模型将是解决机载星敏感器和惯性导航系统组合导航的重要方法。
4.2 微小型星敏感器
小型化和低成本是未来航天器发展的主要方向之一,随着微小型卫星特别是皮纳卫星的快速发展,微小型甚至纽扣式星敏感器必然会出现在未来的航天器姿态控制系统中。
微小型星敏感器首先需要解决在姿态输出精度和频率不降低的情况下,如何缩小星敏感器的体积、质量和功耗。目前美国JPL已经研制的MAST星敏感器,其质量为42 g,功耗为0.069 W。因此在未来微小型星敏感器研究中,优化光学系统设计和姿态计算方法将是重点研究的方向。
利用纳米光学技术设计微小型星敏感器光学系统将是未来突破现有星敏感器成像机制的重点研究方向。纳米光学突破衍射极限光学,可以得到理想中的星点成像,不仅可以减小光学系统体积,还可以得到超分辨率的星点,提高姿态测量精度。利用纳米光学设计星敏感器,不仅需要在光学系统设计中进行研究,相对应的姿态计算方法和现有星敏感器的设计方法有很大的差异,这也是未来微小型星敏感器重点研究的内容。
此外采用新的高性能微型图像传感器,也是微小型星敏感器研究的重点内容。图像传感器是制约星敏感器性能的重要因素之一,也是影响星敏感器体积和质量的重要因素。新型的HAS图像传感器和IRIS-2图像传感器也已经应用于星敏感器,研究集成程度更高、性能更好和功耗更低的图像传感器将是影响微型星敏感器发展的重要因素。
4.3 甚高精度星敏感器
目前星敏感器姿态测量精度可达到1″。在航天器对姿态控制精度要求不断提高的情况下,提高星敏感器姿态测量精度是未来主要研究内容。本节分别从静态测量精度和动态测量精度两个方面展望未来研究趋势。
研究多视场星敏感器技术可以提高静态测量精度。为了提高星敏感器的姿态更新频率,研究人员采用大视场光学系统,在降低星敏感器探测星等的情况下,依然可以满足星图识别的要求。这种设计方法可以缩短星敏感器在星图识别过程中导航星的搜索时间,进而提高姿态测量频率。但与此同时由于采用大视场结构,不仅导致单个星点的姿态测量精度降低,而且还在星图成像过程中产生严重畸变。采用多视场的星敏感器设计方法,可以在不改变探测星等的情况下减小视场,保证星敏感器的姿态测量精度。此外传统星敏感器在偏航和俯仰轴方向精度为1~10″,在横滚轴方向精度为8~100″。这是由于在星敏感器的光学系统中,其焦距的尺寸比图像传感器尺寸大很多,从而导致了星敏感器在光轴方向的姿态精度误差约是焦平面上两个方向的6~16倍。除了继承传统星敏感器中初始提取模式和姿态跟踪模式外,多视场星敏感器还可以有角速度测量模式和快速姿态更新模式。通过融合多个视场的星图,可以显著降低光轴方向姿态误差,使三轴同时达到较高的测量精度。通过控制多个视场的积分时间和积分模式,可以测量出航天器的角速度,进而取代姿态测量系统中的速率陀螺,降低航天器发射成本。在快速姿态更新模式中,通过差频技术,可以交替利用多个镜头获得的星图更新航天器姿态信息,提高星敏感器姿态更新频率。因此多视场星敏感器将是未来研究的重点。
在星敏感器动态测量精度研究方面,提高星敏感器的动态性能是未来研究重点。高精度星敏感器要求在高动态性能和恒星质心提取的精度条件下,既要保证星敏感器视场内有足够的导航星,又要保证在相邻的两帧星图中有足够的跟踪和姿态计算导航星。为了进一步提高星敏感器的动态性能,还可以针对以下内容进行研究:
(1)采用多视场星敏感器结构。这样既能保证星敏感器姿态测量精度,又能保证在高动态特性下,星敏感器视场内有足够的导航星可以使用;
(2)提高星敏感器光电探测系统的动态性。选用高灵敏度的探测器,减小电路噪声以及在轨高动态情况下杂散光对星敏感器的影响;
(3)研究高动态星敏感器恒星星点提取的误差补偿算法。在高动态情况下,星点成像可能出现拖尾或者模糊的情况,因此需要研究高动态条件下星点成像特性和误差补偿算法,提高星点质心提取精度;
(4)研究高动态星敏感器姿态跟踪算法。为了满足不同角速度条件快速准确进行姿态跟踪,设计自适应的姿态跟踪算法,既可以估计出角速度,又能快速准确的进行星图识别和姿态跟踪。
5结束语
经过半个多世纪的发展,星敏感器已经成为最主要的姿态测量仪器,并且在航天领域得到广泛应用。相对于国外发展现状,国内在星敏感器技术研究方面仍然存在着很大的差距。因此,本文对星敏感器的发展历程进行总结介绍,并且讨论分析星敏感器关键技术的发展现状,最后展望星敏感器的未来发展趋势,为国内星敏感器研究人员提供一些参考。
首先,本文总结了弹载星敏感器和星载星敏感器的发展历程。早期星敏感器最要应用在飞机和导弹上,用来跟踪固定恒星并修正惯性导航系统误差,目前弹载星敏感器依然是星敏感器的重要应用方向。接下来按照发展顺序,分3个阶段介绍国外星载星敏感器的发展历程,并且对其中典型代表产品的性能进行对比分析和介绍。对国内星敏感器研究,本文也进行了介绍。
然后,本文基于星敏感器的工作原理,按照星点质心定位算法、星图识别算法和姿态解算算法3个方面介绍了星敏感器关键技术的发展现状。星点质心定位精度不仅直接影响最终姿态测量精度,也会影响星图识别成功率和速度,国内外诸多学者提出各种方法提高质心定位精度,对影响质心定位精度的误差进行分类和补偿,本文对各种提高质心定位精度的算法进行分析和讨论。星图识别是星敏感器最核心的算法,也是研究最多的内容,本文按照基于星座特征、字符模式和智能行为这3类内容分析讨论了星图识别算法的研究现状。本文按照确定性姿态解算算法和动态姿态解算算法分两类讨论和分析。对星敏感器地面标定和在轨标定的方法也进行讨论分析。
最后,本文总结星敏感器的未来发展趋势,认为航空机载星敏感器、微小型星敏感器和甚高精度星敏感器将是未来星敏感器研究的重点方向。
参考文献:
[1]屠善成.卫星姿态动力学与控制(3)[M].北京:中国宇航出版社, 2003.
TU SH CH.SatelliteAttitudeDynamicsandControl(3)[M]. Beijing:China Astronautic Publishing House,2003.(in Chinese)
[2]龚德铸,王艳宝,卢欣.基于星敏感器的CCD47-20航天应用[J].控制工程,2006,6:42-50.
GONG D Z,WAND Y B,LU X. The application of CCD 47-20 in aerospace for star tracker[J].ControlEngineering,2006,(6):42-50.(in Chinese)
[3]WAHBA G. Problem 65-1:a least squares estimation of satellite attitude[J].SIAMReview,1965,7(3):385-386.
[4]STONE R C. A comparison of digital centering algorithms[J].TheAstronomicalJ.,1989,97(4):1227 1237.
[5]SHORTIS M R,CLARKE T A,SHORT T. A comparison of some techniques for the subpixel location of discrete target images[J].SPIE,1994.
[6]魏兴国,张广军,江洁.星敏感器中星图图像的星体细分定位方法研究[J].北京航空航天大学学报,2003,29(9):812-815.
WEI X G,ZHANG G J,JIANG J. Subdivided locating method of star image for star sensor[J].J.BeijingUniversityofAeronauticsandAstronautics,2003,29(9):812-815.(in Chinese)
[7]李玉峰,郝志航.星点图像超精度亚像元细分定位算法的研究[J].光学技术,2005,31(5):666-671.
LI Y F,HAO ZH H. Research of hyper accuracy subpixel subdivision location algorithm for star image[J].OpticalTechnique,2005,31(5):666-671.(in Chinese)
[8]GROSSMAN S B,EMMONS R B. Performance analysis and size optimization of focal planes for point-source tracking algorithm applications[J].OpticalEngineering,1984,23(2):167-176.
[9]Stanton R H,Alexander J W,Dennison E W,etal. Optical tracking using charge-coupled devices[J].OpticalEngineering,1987,26(9) :930-938.
[10]HEGEDUS Z S,SMALL G W. Shape measurement in industry with sub-pixel definition[J].Acta.Polytech.SC.AP,1985,150(2):101-104.
[11]ALEXANDER B F,KIM C N. Elimination of systematic error in subpixel accuracy centroid estimation[J].OpticalEngineering,1991,30(9):1320-1330.
[12]RUFINO G,ACCARDO D. Enhancement of the centroiding algorithm for star tracker measure refinement[J].ActaAstronautica,2003,53(2):135-147.
[13]GILLILAND A A. Details of noise sources and reduction processes[C]. ASP Conference Series,San Francisco,USA,Jan. 6-8,1992:123.
[14]SNYDER D L,HELSTROM C W,LANTERMAN A D,etal.. Compensation for readout noise in CCD images[J].J.OpticalSocietyofAmericaA,1995,12(2):272-283.
[15]HOLST G C.CCDArrays,Cameras,andDisplays,Bellingham[M]. SPIE Optical Engineering Press,WA:Winter Park,FL 32789,1998.
[16]HANCOCK B R,STIRBL R C,CUNNINGHAM T J,etal.. CMOS active pixel sensor specific performance effects on star tracker imager position accuracy[J].SPIE,2001,4284(11):43-53.
[17]张辉,袁家虎,刘恩海.CCD噪声对星敏感器星点定位精度的影响[J].红外与激光工程,2006,35(5):629-633.
ZHANG H,YUAN J H,LIU E H. CCD noise effects on position accuracy of star sensor[J].InfraredandLaserEngineering,2006,35(5):629-633.(in Chinese)
[18]JUNKINS J L,WHITE C,TURNER J. Star pattern recognition for real-time attitude determination[J].J.Astronaut.Sci.,1977,25(1):251-270.
[19]LIEBE C C. Pattern recognition of star constellations for spacecraft application[J].IEEEAeronauticsElectronicSystemMagazine,1992,7(6): 34-41.
[20] Quine B M,Whyte H F D. A fast autonomous star acquisition algorithm for spacecraft [J].ControlEngineeringPractice,1996,4(12):1735-1740.
[21]DOUMA S R. Development of an algorithm for autonomous star identification[D]. Delft University of Technology:Faculty of Aerospace Engineering,1997.
[22]MORTARI D,SAMAAN M A,BRUCCOLERI C. The pyramid star identification technique[J].Navigation,2004,51(3):171-184.
[23]GUANGJUN Z,WEI X,JIANG J. Full-sky autonomous star identification based on radial and cyclic features of star pattern[J].ImageVisionComputing,2008,26(7):891-897.
[24]PADGETT C AND DELGADO K K. A grid algorithm for star identification[J].IEEETransactiononAerospaceandElectronicsSystems,1997,33(1):202-213.
[25]MENG N,ZHANG D N,JIA P F. Modified grid algorithm for noisy all-sky autonomous star identification[J].IEEETransactiononAerospaceandElectronicsSystems,2009,45(2):516-522.
[26]LEE H. Star pattern identification technique by modified grid algorithm[J].IEEETransactionsonAerospaceandElectronicSystems,2007,43(3):1112- 1116.
[27]李葆华,张迎春,许士文,等.用KMP算法进行星敏感器星图识别的改进方法[J].光电工程,2004,31(2):19-22.
LI B H,ZHANG Y CH,XU SH W,etal.. Improvement for star map recognition of star sensor with KMP algorithm[J].Opto-ElectronicEngineering,2004,31(2):19-2.(in Chinese)
[28]HONG J,DICKERSON J A. Neural-network-based autonomous star identification algorithm[J].J.Guidance,ControlandDynamics,2000,23(4):728-735.
[29]MCCLINTOCK S,LUNNEY T,HASHIM A. A genetic algorithm environment for star pattern recognition[J].J.IntelligentandFuzzySystems,1998,6(1):3-16.
[30]PALADUGU L,WILLIAMS B G,SCHOEN M P. Intelligent star pattern recognition for attitude determination: the “Lost in space” problem[J].J.AerospaceComputing,Information,andCommunication,2006,3(11):538-549.
[31]QUAN W,FANG J C. A star recognition method based on the adaptive ant colony algorithm for star sensors[J].Sensors,2010,10(3):1955-1966.
[32]SHUSTER M D,OH S D. Three-axis attitude determination from vector observations[J].J.Guidance,Control,andDynamics,1981,7(1):70-77.
[33]BARITZHACK I Y,HARMAN R R. Optimized TRIAD algorithm for attitude determination[J].J.Guidance,Control,andDynamics,1997,20(1):208-211.
[34]MARKLEY F L. Optimal attitude matrix from two vector measurements[J].J.Guidance,Control,andDynamics,31(3):765-768.
[35]SHUSTER M D. Kalman filtering of spacecraft attitude and the QUEST model [J].J.AstronauticalSciences,1990,38(3):377-393.
[36]SCHMIDT S F. Kalman filter:its recognition and development for aerospace application[J].J.Guidance,Control,andDynamics,1981,4(1):4-7.
[37]JULIER S J,UHLMANN J K,DURRANT-WHYTE H F. A new approach for filtering nonlinear systems[C]. American Control Conference,Seattle,WA,USA,June 21-23,1995:116.
[38]SHUSTER M D. A simple kalman filter and smoother for spacecraft attitude[J].J.AstronauticalSciences,1989,37(1):89-106.
[39]BAR-ITZHACK I Y. REQUEST:a recursive quest algorithm for sequential attitude determination[J].J.Guidance,Control,andDynamics,1996,5(1):1034-1038.
[40]OSHMAN Y,CARMI A. Attitude estimation from vector observations using genetic algorithm embedded quaternion particle filter[J].J.Guidance,Control,andDynamics,2006,29(4):879-891.
[41]GEORGE J,TEREJANU G,SINGLA P. Spacecraft attitude estimation using adaptive gaussian sum filter[J].J.AstronauticalSciences,2009,57(1):31-45.
[42]LAM Q M,CRASSIDIS J L. Precision attitude determination using a multiple model adaptive estimation scheme[C]. IEEE Aerospace Conference,Big Sky,Montana,USA,March 3-10,2007:137-139.
[43]SAMAAN M A,GRIFFITH T,JUNKINS J L. Autonomous on-orbit calibration of star tracker[C]. Core technologies for space system conference,Colorado Springs,USA,Nov. 27-30,2001:158-161.
[44]GRIFFITH D T,SINGLA P,JUNKINS J L. Autonomous on-orbit calibration approaches for star tracker camera[J].AdvancesintheAstronauticalSciences,SpaceflightMechanics,2002,112(1):39-57.
[45]刘一武,陈义庆.星敏感器测量模型及其在卫星姿态确定系统中的应用[J].宇航学报,2003,24(2):162- 167.
LIU Y W,CHEN Y Q. Star sensor measurement model and its application to the spacecraft determination system[J].J.Astronautics,2003,24(2):162- 167.(in Chinese)
[46]袁彦红.星敏感器在轨标定算法研究[D].哈尔滨:哈尔滨工业大学航天学院,2007.
YUAN Y H. The research of on-orbit calibration algorithm of star sensor[D]. Harbin:School of Astronautics, Harbin Institute of Technology,2007.(in Chinese)
[47]魏新国,张广军,樊巧云,等.基于RAC约束的星敏感器在轨校准方法研究[J].光学 精密工程,2008,16(10):2010-2013.
WEI X G,ZHANG G J,FAN Q Y,etal.. On-orb it calibration of star sensor based on radial alignment constraint[J].Opt.PrecisionEng.,2008,16(10):2010- 2013.(in Chinese)
[48]LIU H,WANG J,TAN J,etal.. Autonomous on-orbit calibration of a star tracker camera[J].OpticalEngineering,2011,50(2):023604-023604-8.
[49]LIEBE C C. Charged particle-induced noise in camera system[J].IEEETransactiononNuclearScience,2001,48(4):1541-1549.
[50]MINEC-DUBE J,JACOB P,GUILLON D,etal.. Protons robustness improvement for the SED 26 star tracker[C]. The 6th International ESA Conference on Guidance,Navigation and Control Systems. Loutraki,Greece,Oct.17-20,2005:89.
[51]周建涛,蔡伟,武延鹏,等.星敏感器空间辐射效应研究[J].宇航学报,2010,31(1):24-30.
ZHOU J T,CAI W,WU Y P,etal.. Research on radiation effects of star sensors[J].J.Astronautics,2010,31(1):24-30.(in Chinese)

梁斌(1968—),男,江西景德镇人,教授,博士生导师,1989年、1991年于西北工业大学分别获得学士、硕士学位,1994年于清华大学获得博士学位,主要从事微小卫星技术、导航制导与控制、机器人运动控制等方面的研究。E-mail:bliang@tsinghua.edu.cn
《光学 精密工程》(月刊)
● 中国光学开拓者之一王大珩院士亲自创办的新中国历史最悠久的光学期刊
● 现任主编为国家级有突出贡献的青年科学家曹健林博士
● Benjamin J Eggleton, John Love等国际著名光学专家为本刊国际编委
《光学 精密工程》主要栏目有现代应用光学(空间光学、纤维光学、信息光学、薄膜光学、光电技术及器件、光学工艺及设备、光电跟踪与测量、激光技术及设备);微纳技术与精密机械(纳米光学、精密机械);信息科学(图像处理、计算机应用与软件工程)等。
❋ 美国工程索引EI核心期刊
❋ 中国出版政府奖期刊提名奖
❋ 中国精品科技期刊
❋ 中文核心期刊
❋ 百种中国杰出学术期刊
❋ 中国最具国际影响力学术期刊
主管单位:中国科学院
主办单位:中国科学院长春光学精密机械与物理研究所
中国仪器仪表学会
地址:长春市东南湖大路3888号邮编:130033
电话:0431-86176855传真:0431-84613409
电邮:gxjmgc@sina.com网址:http://www.eope.net
定价:100.00元/册
star tracker technique
LIANG Bin1*, ZHU Hai-long1, ZHANG Tao1, TONG Yu-chan2
(1.DepartmentofAutomation,TsinghuaUniversity,Beijing100084,China;
2.Logisticscenter,ChinaAcademyofLaunchVehicleTechnology,Beijing100076,China)
*Correspondingauthor,E-mail:bliang@tsinghua.edu.cn
Abstract:In this paper, the research status and development tendency of star tracker technique are reviewed. Firstly, the development process of star tracker at home and abroad is summarized. Then, key techniques such as star centroid algorithm, star recognition algorithm and attitude determination algorithm are summarized respectively based on the working principle of star tracker. Based on the influence of star centroid localization precision on measurement precision of star tracker, the research status of star centroid localization algorithm and the corresponding error compensation are discussed. According to the constellation characteristics, character models and intelligent behavior, the star map recognition algorithm is introduced and the comparative analysis is developed. According to the determined attitude determination algorithm and dynamic attitude determination algorithm, the research status of attitude determination algorithm is discussed. Finally, the future development of star tracker is prospected, and the development trend and key research contents in the future of airborne star tracker, micro star tracker and super high precision star tracker are discussed.
Key words:star tracker;star centroid;star recognition;attitude determination
作者简介:
中图分类号:V448.222
文献标识码:A
doi:10.3788/CO.20160901.0016
文章编号2095-1531(2016)01-0016-14
基金项目:国家高技术研究发展计划(863计划)资助项目(No.2014AA7096015);航空基金资助项目(No.20125858003)
收稿日期:2015-09-07;
修订日期:2015-09-29
Supported by National High-tech R&D Program of China(No.2014AA7096015), Aviation Fund Project(No.20125858003)
