
中大功率航天电动伺服机构发展综述
2016-03-16 05:37郭洪根王指国
导航定位与授时 2016年3期
郭洪根,王指国
(中国航天科工集团伺服技术研究所,南京 210006)
中大功率航天电动伺服机构发展综述
郭洪根,王指国
(中国航天科工集团伺服技术研究所,南京 210006)
随着新材料、新技术的发展,电动伺服机构在电传飞机、先进飞行器、推力矢量控制中得到成功的应用。对中大功率航天电动伺服机构在国内外的研究及应用情况进行了介绍。通过分析,在国外电动伺服机构的运用已经相当成熟,在国内中大功率电动伺服机构在航天应用中已初具规模,出现逐步取代液压伺服机构的趋势。
姿态控制;电动伺服机构;航天;应用现状
0 引言
伺服机构是导弹和火箭制导与控制系统的执行机构,通过带动喷管或舵面摆动实现弹体的姿态控制(用于舵面控制的伺服机构常称为 “舵机”)。伺服机构按照所使用的能源分类, 可分为气动伺服机构、液压伺服机构和电动伺服机构三大类。电动伺服机构通过电机直接将电能转化为电机转子旋转运动形式的机械能,并通过传动装置带动被控对象运动。电动伺服机构以简单可靠、工艺性好、使用维护方便、能源单一、成本低廉、易于控制等特性引起了人们的广泛关注和深入研究, 在导弹上得到了广泛的应用。早期,电动伺服机构主要运用在输出力矩小、功率等级低的小型导弹舵的控制中。例如:美国的标准RIM66 /67中远程舰空导弹、毒刺FIM-92A肩射式近程防空导弹、复仇者近程低空防空导弹、AIM-120空空导弹、战斧巡航导弹,法国的R530中距空空导弹、响尾蛇地空导弹、魔术R550空空导弹、海响尾蛇TSE5500近程舰对空导弹、超530F中程空空导弹、飞鱼MM38岸对舰导弹、飞鱼AM39空对舰导弹和霍特反坦克导弹,以色列的VIPER反坦克/反直升机导弹,瑞典的RBS70便携式近程防空导弹,南非的短刀空空导弹等。随着新材料、新技术以及大功率器件的发展,电动伺服机构的功率等级逐步提升,其动、静态等综合性能得到极大的提高。在电动伺服技术不断深入研究的基础上,欧美等航空大国的中大功率电动伺服机构已在先进飞行器和推力矢量控制中得到了广泛的应用,并且取得成功。国内宇航用中大功率电动伺服机构的研制相对发展较晚,经过相关研制单位的不懈努力,目前中大功率电动伺服机构在航天型号中的应用已初具雏形。
1 国外中大功率航天电动伺服机构的发展
从20世纪70年代中期开始,美国空军、海军以及宇航局对电动伺服机构取代战略导弹和航天飞机上液压伺服机构进行了一系列可行性研究,到1985年设计出了取代原液压伺服机构的电动伺服机构,得出“电动伺服机构的性能与相应的液压伺服机构相当或更好”的结论。其中最具代表性的成功应用是从1993~1998年由美国空军、海军资助 NASA Dryden 研究中心进行的“F/A-18B战机电动作动系统技术”课题的研究,这一课题重点研究“电动舵系统替代原有的液压舵系统”[1-2],F/A-18B试验用电动伺服系统如图1所示。试验结果表明,该电动伺服系统的跟随性能优于原电液伺服系统,同时飞机在低速或高速连续翻滚时,机电作动器的频域响应特性比液压作动器的性能要好。

图1 F/A-18B飞机上试验用电动伺服系统Fig.1 The EMA applied on the F/A-18B plane
GOODRICH公司伺服机构研发部门为某型号导弹喷管推力矢量控制研发的一体化驱动电动伺服机构,该电动伺服机构采用伺服电机、行星滚柱丝杠、LVDT位置传感器同轴一体化结构布局,结构示意图和产品如图2所示,主要性能指标见表1。其结构设计简洁紧凑,紧固件少,集成度高。丝杠采用中空设计,电位器内置,为结构布局带来了便利。

图2 GOODRICH公司的机电作动器Fig.2 The EMA designed by GOODRICH

参数指标质量/kg24工作行程/mm±65最大行程/mm±90最大负载/kN33最大速度/(mm/s)350零位长度/mm540最大直径/mm135
美国AMETEK公司研究的机电作动器结构如图3所示。其采用电机、螺母、电位器同轴一体化结构,功率等级为5kW级,主要参数见表2。

图3 AMETEK公司研制的机电作动器Fig.3 The EMA designed by AMETEK

参数指标电压等级/VDC270总行程/mm100最大速度/(mm/s)133负载力/kN40质量/kg6.4
汉胜公司设计生产的余度机电作动器产品如图4所示。产品电能到机械能的转化效率大于81%[4]。

图4 汉胜公司研制的产品Fig.4 The EMA designed by Hamilton Sundstrand
欧空局的“织女星”运载火箭(Vettore Europeo Generazione Avanzata,VEGA)四级发动机均采用电动伺服机构[5]。四级电动伺服机构的主要性能参数见表3。其中一级机电作动器产品如图5所示,二级机电作动器产品如图6所示。

表3 织女星火箭四级伺服机构主要指标

图5 织女星火箭一级机电作动器Fig.5 EMA of the first Stage Servo Mechanism of the VEGA

图6 织女星火箭二级机电作动器Fig.6 The second stage EMA of the VEGA
Moog公司为X-43A的机翼配套研制的机电作动器产品如图7所示[7],产品主要参数见表4。

图7 X-43A机翼用机电作动器产品Fig.7 The EMA applied on the X-43A plane
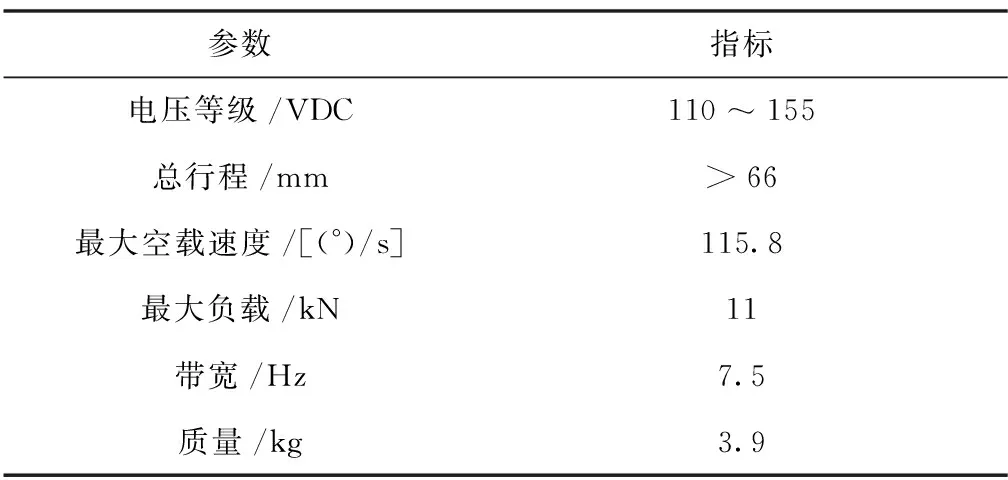
参数指标电压等级/VDC110~155总行程/mm>66最大空载速度/[(°)/s]115.8最大负载/kN11带宽/Hz7.5质量/kg3.9
Moog公司设计生产的余度机电作动器产品及工作原理图如图8所示[9]。
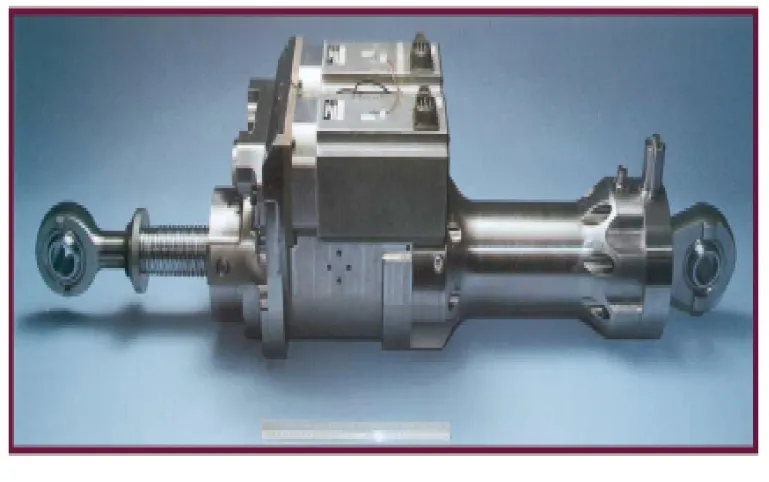

图8 Moog公司设计的余度产品及原理图Fig.8 The photo and structure of the EMA by Moog
刘易斯研究中心多年来进行以电动伺服机构代替液压伺服机构用于推力矢量控制的研究,并成功地为阿特拉斯运载火箭研制了功率等级分别为52.2kW、29.6kW和18.6kW的一、二、三级推力矢量电动伺服系统。
通过上述叙述可知,在国外中大功率电动伺服机构已发展了很长的时间,技术成熟,产品已向系列化方向发展。
2 国内中大功率航天电动伺服机构的研发情况
在国内,小功率电动伺服机构已广泛应用于各类导弹、无人机和直升机等型号中。研制单位有专业研究所和高校。
随着需求牵引,原来从事中大功率液压伺服机构研制的专业研究所转向研发中大功率电动伺服机构。经过多年努力,中大功率电动伺服机构已经获得工程应用并成为标配产品,逐步取代传统液压伺服机构。小功率电动伺服机构研制单位也逐步进入中大功率电动伺服机构市场。
作者所在单位研制的某型舵面控制用旋转输出式电动伺服机构,采用输出轴直接与舵轴相连结构,通过控制机电作动器的转角实现直接控制舵偏角。产品功率4kW,带宽大于15Hz。同时,也研制了直线输出方式的机电作动器,通过摇臂与舵面的舵轴相连,产品带宽大于20Hz。面向发动机推力矢量控制需求研制的电动伺服机构,20kW级产品已应用于实际工程,更大功率产品正在研发。
目前,国内高可靠性、高安全性多余度电动伺服机构已进入工程研制阶段。多余度电动伺服机构的研制为电动伺服机构进入运载火箭、先进飞行器等高可靠性产品的应用提供了技术基础。
当前,在功率等级、功率质量比和集成一体化设计方面,国内与国外产品还存在较大的差距;在电磁兼容性方面,国内单位还需开展较多研究工作,特别是随着功率等级的提高,此问题将会影响到系统的可靠工作;在永磁同步电机及旋转变压器等基础类机电产品上,国内外产品的相对差距不大。随着国内行业需求的牵引以及国家的大力推广,国内外产品的差距正在逐步缩小。
3 结论
本文对中大功率航天电动伺服机构的研制和应用情况进行了介绍和分析,中大功率电动伺服机构在国外的运用已经成熟。随着国内研制单位的大力推进以及用户使用需求的强烈牵引,中大功率电动伺服机构在航天上的应用已初具规模。在后续新型号产品研制中,中大功率电动伺服机构已出现全面取代电液伺服机构的趋势。随着余度电动伺服机构的研制,在未来几年,高可靠性多余度电动伺服机构将逐步运用到运载火箭以及其他具有高安全性要求的先进飞行器中。
在轻质小型化、网络化、智能化等终极目标的需求牵引下,随着新材料、新技术的发展,电动伺服机构在高度集成一体化、智能化、高可靠性等方面还有极大的发展空间。
[1] Jensen S C, Jenney G D, Dawson D. Flight test experience with an electromechanical actuator on the F-18 Systems Research Aircraft[C]// Digital Avionics Systems Conference, 2000. Proceedings. DASC.the 19thVolume:1.
[2] Navarro R. Performance of an Electro-Hydrostatic actuator on the F-18 systems research aircraft[R]. NASN TM-97-206224, October 1997.
[3] Gerada C, Bradley K J.Integrated PM machine design for an aircraft EMA[J]. IEEE Transactions on Industrial Electronics, 2008, 55(9):3300-3303.
[4] Torabzadeh-Tari M. Analysis ofelectro-mechanical actuator systems in more electric aircraft applications[J]. School of Electrical Engineering, 2005.
[5] Vanthuyne T. An electrical thrust vector control system for the Vega launcher[C]//Proceedings of 13thEuropean Space Mechanisms and Tribology Symposium-ESMATS 2009, Vienna Austria 23-25 September 2009.
[6] Dée G, Vanthuyne T, Alexandre P. An electrical thrust vector control system with dynamic force feedback[C]//International Conference on Recent Advances in Aerospace Actuation Systems and Components,June 13-15 2007, Toulouse, France.
[7] Lin Y, Baumann E, Bose D M, et al. Tests and techniques for characterizing and modeling X-43A electromechanical actuators[J]. 2008.
[8] Bates L B, Young D T. Developmentaltesting of electric thrust vector control systems for manned launch vehicle applications[J]. Proceedings of 41stAerospace Mechanisms Symposium ,Jet Propulsion Laboratory, May 16-18, 2012.
[9] Derrien J C, Sécurité S D. ElectroMechanical Actuator (EMA) advanced technologies for flight controls[C]//28thInternational congress of the aeronautical sciences. 2012.
[10] Garrison M, Davis M, Steffan S. Human-Rated Upper Stage Thrust Vector Control System Architecture Selection.43rdAIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit 8-11 July 2007, Cincinnauti, OH.
[11] 曾广商,赵守军,张晓莎. 我国载人运载火箭伺服机构技术发展分析[J]. 载人航天,2013,19(4):3-10.
[12] 郭宏,刑伟.机电作动系统发展[J].航空学报,2007,28(3):620-627.
[13] 任晓军,唐苗,张新华,谢劲松.新型一体化直接驱动电动伺服机构技术发展现状[J].战术导弹控制技术,2010,27(2):31-39.
[14] 沙南生,李军.功率电传机载一体化电作动系统的研究[J].北京航空航天大学学报,2004,30(9):909-912.
[15] 汪军林,解付强,刘玉洁.导弹电动舵机的研究现状及发展趋势[J].飞航导弹,2008(3):42-46.
[16] Bahm C, Baumann E, Martin J, et al. The X-43A Hyper-X Mach 7 flight 2 guidance, navigation, and control overview and flight test results[J]. AIAA paper, 2005-3275.
[17] Lin Y, Baumann E, Bose D M, et al. Tests and techniques for characterizing and modeling X-43A electromechanical actuators[J]. NASA/TM 2008-214637.
[18] Glaessgen E H, Dawicke D S, Johnston W M, et al. X-43Arudder spindle fatigue life estimate and testing[J]. NASA/TM 2005-213525.
[19] Todeschi M. Airbus-EMAs for flight actuation systems-perspectives[C]//International conference on recent advances in aerospace actuation systems and components. 2010:1-8.
[20] The X-38 V-201 flap actuator mechanism[C]// Proceedings of the 37thAerospace Mechanisms Symposium. Johnson Space Center, May 19-21,2004.
[21] Schinstock D E, Scott D A. Controller design for EMA in TVC incorporating force feedback, NASA[R]. MSFC Technical Report, University of Alabam, Mechanical Engineering Department, 1998.
A Review of the Current Development of High-Power Aerospace EMA
GUO Hong-gen,WANG Zhi-guo
(Servo technology institute of China Aerospace science & Industry Corp,Nanjing 210006,China)
With the rapid development of the new material and technology, the Electromechanical Actuator(EMA) has been successfully applied in the design of fly-by-wire aircraft, advanced space vehicle and thrust vector control systems.This paper introduces researches and applications of the High-power EMA in the world.According to the study, the EMA technology has been applied widely in foreign countries, and began to contribute to thrust vector control of Aerospace in China.We can predict that the EMA will take the place of Hydraulic Servo Mechanism in the future.
Attitude control;Electric servo mechanism;Aerospace;The condition of the application
10.19306/j.cnki.2095-8110.2016.03.001
2016-02-15;
2016-04-02。
郭洪根(1970-),男,研究员,主要从事伺服机构设计的研究工作。
TM32
A
2095-8110(2016)03-0001-05
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2021年3期)2021-02-24
发电设备(2020年2期)2020-04-06
电子制作(2019年16期)2019-09-27
汽车零部件(2019年7期)2019-08-16
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年7期)2019-04-25
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2017年3期)2017-11-23
西安航空学院学报(2017年3期)2017-07-05
