
水平旋转贴片头的设计与运动学仿真
2016-03-18 01:04Designandresearchofhorizontalrotationmountinghead
制造业自动化 2016年1期
Design and research of horizontal rotation mounting head
付志斌,肖曙红,林德育
FU Zhi-bin, XIAO Shu-hong, LIN De-yu
(广东工业大学 机电工程学院,广州 510006)
水平旋转贴片头的设计与运动学仿真
Design and research of horizontal rotation mounting head
付志斌,肖曙红,林德育
FU Zhi-bin, XIAO Shu-hong, LIN De-yu
(广东工业大学 机电工程学院,广州 510006)
摘 要:贴片头作为贴片机关键部件之一,是影响整个贴片机贴装速度的关键。为提高贴片效率,提出并设计一款水平旋转贴片头,介绍了水平贴片头的工作原理以及其具体的结构设计,并给出了相应的技术参数和设计要求,该贴片头适用于模组机,多个水平旋转贴片头共同工作。同时利用ADAMS仿真软件对水平旋转贴片头进行了运动学仿真,给出了贴片头在特定工作状态下吸嘴末端的位移、速度、角速度等特性曲线,为水平旋转贴片头的运动性能优化及控制策略提供一定的参考。
关键词:水平旋转贴片头;贴片机;ADAMS;运动学仿真
0 引言
目前我国电子产品制造业正处于快速发展的态势下,我国表面贴装技术(surface mount technology,SMT)及其生产线也得到了飞速的发展。贴片机是SMT生产线中极为关键的设备之一,其市场需求量每年都在增长。目前我国市场上的贴片机基本上都是国外的品牌(富士、松下JUKI、环球、三星西门子、飞利浦等),我国自主研发的贴片机还处于研发调试阶段。
SMT 贴片机实际上是一种精密的工业机器人,是“机-电-光”以及计算机控制技术的综合体[1]。贴片机发展的速度对表面贴装技术(surface mount technology,SMT)的发展有着直接的影响。贴片头是贴片机的关键部件之一[5],其功能是先借助x-y坐标运动系统或送料器的运动到达需要贴片的位置,在通过Z向的直线运动以及θ角的转动完成电子元件的吸取及贴装。其中z向的直线运动是完成电子元件吸放时的上下运动,θ角的转动则是完成电子元件的角度偏移的校正,如图1所示。
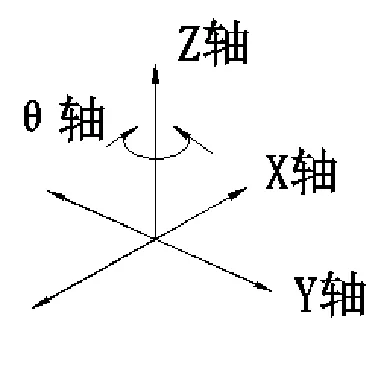
图1 贴片头各轴示意图
目前世界上的电子装备正在向密集化、小型化、轻薄化方向发展,这就要求电子元件也得小、轻和高效可靠,进而对贴片头的性能提出了更高的要求。为提高贴装速度,松下、索尼和富士等大型企业设计了一些可旋转的贴片头,可以吸放多种大小不同的元器件,目前该技术还只是这几个大型的企业所掌控,国内的技术一般都是将多个贴装头组合在一块,头数越多,速度越快,但是随着头数的增加,复杂性增加,贴装头整体的惯量增大,影响X-Y轴的加速度与速度,对于整机的功率要求也相应增大[1],因此针对此问题设计了一款水平旋转贴片头。
1 水平旋转贴片头结构设计
从机器人的概念来说,贴片头实际上是一只智能的机械手[2]。
1.1 水平旋转贴片头的设计要求
水平旋转贴片头由12个吸嘴组成,每个吸嘴均能够独立完成z轴的上下运动和θ的旋转运动。
根据水平旋转贴片头的运动特点拟定其一个贴片头一个工作循环大致分为以下三步:
吸取:即吸嘴末端在飞达正上方时,经0.3s完成吸取,行程为10mm,再经0.3s回到初始位置,旋转贴片头30°,在0.3s内完成角度旋转,依次完成12个嘴的吸取。
移动:经XY轴移动到达贴装位置。
贴装:吸嘴经0.3s向下运动10mm,贴装好后经再0.3向上移动10mm,然后贴片头旋转30°,依次完成其余的贴装。
据此,水平旋转贴片头主要设计要求如表1所示。
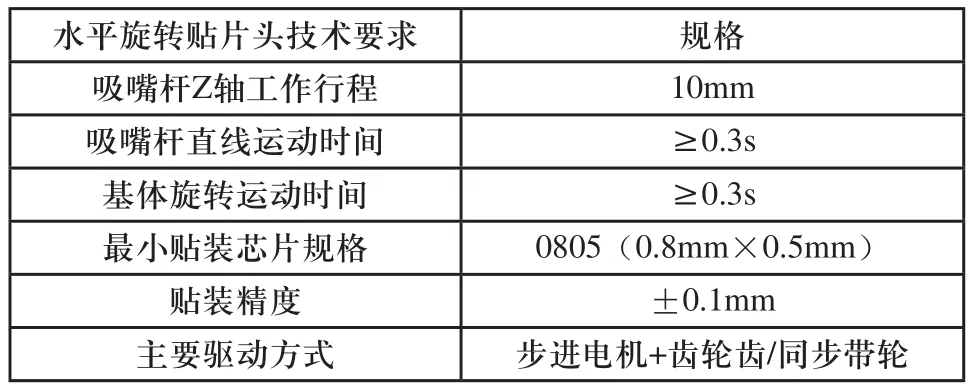
表1 水平旋转贴片头设计要求
针对上述设计要求设计出水平旋转贴片头整体结构如图1所示。
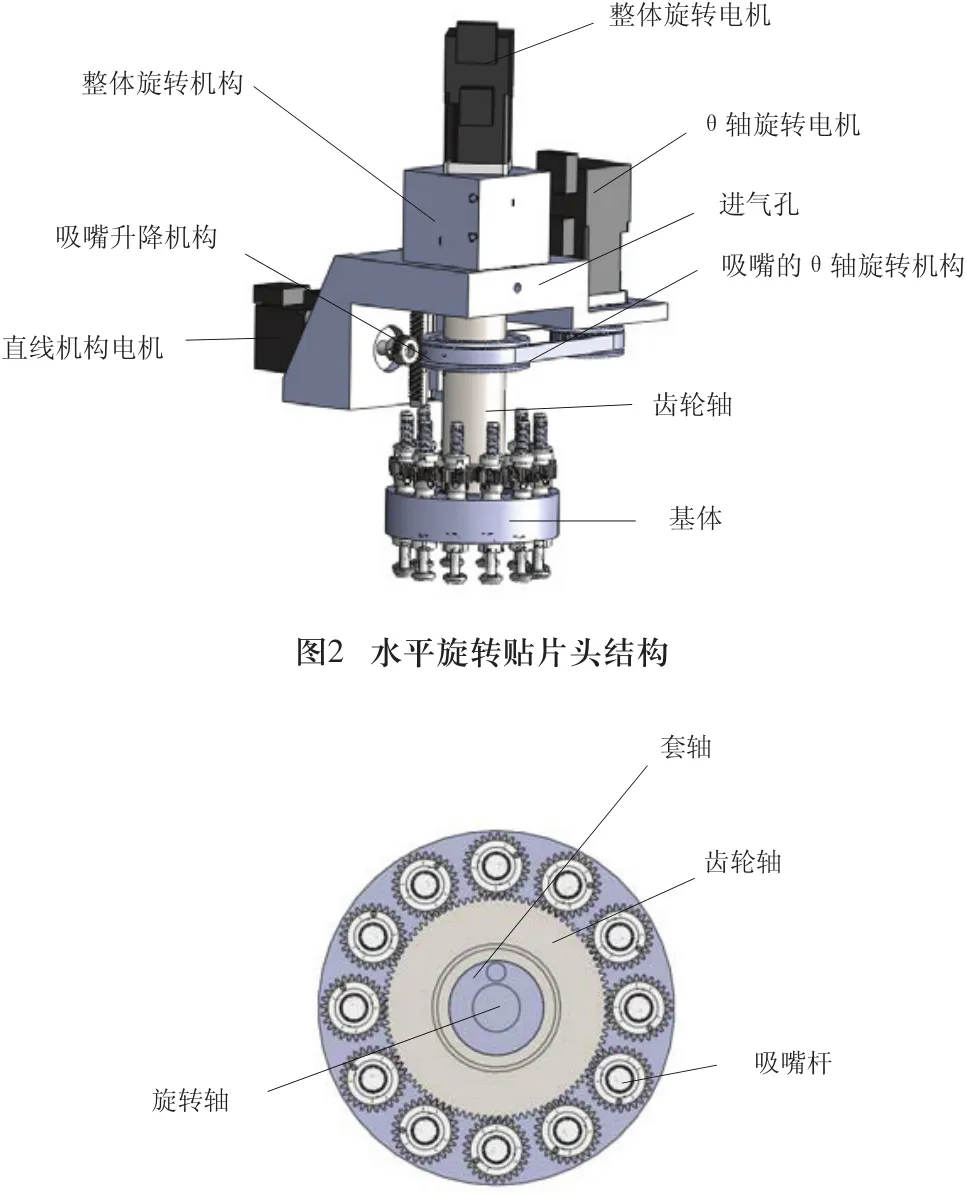
图3 吸嘴θ轴驱动俯视
1.2 贴片头设计特点
由于芯片的拾取是利用真空负压来实现,所以将吸嘴轴设计成中空结构,并且由于吸嘴是要旋转的所以将通气孔设计在支撑座上,在齿轮轴内和旋转轴之间设计一个带有通气孔的套轴,且套轴用销钉卡在支撑座上,吸嘴与套轴上的通气孔接通实现吸嘴真空和吹气,这样就能保证贴装头在旋转时候气管不随着贴片头旋转而旋转。
贴片头的整体旋转机构采用电机通过联轴器连接贴装轴驱动贴装轴旋转,吸嘴的θ轴旋转机构由电机带动同步带轮,同步带轮带动齿轮轴,齿轮轴通过与安装在吸嘴上的齿轮进行啮合来驱动吸嘴θ轴向旋转,吸嘴升降机构是由电机带动齿轮齿条,由齿条驱动吸嘴完成吸嘴上下运动的。
本设计使得贴片头整体结构紧凑,体积小,相对其他将贴片头简单组合在一起的结构,旋转贴片头整体的惯量减小。
2 水平旋转贴片头的运动学分析与仿真
贴片头的运动学性能严重影响其运动精度与速度,对水平旋转贴片头做运动学分析是为了得到执行末端的位置与姿态情况,求解执行末端的位移、速度及加速度和时间之间的关系,从而为水平旋转贴片头动态仿真及驱动电机控制提供依据。
2.1 旋转贴片头的运动学分析
采用D-H(Denavit-Hartenberg)法建立旋转贴片头的连杆坐标系[8],由于旋转贴片头的工作时一次只有一个吸嘴杆在贴装,对模型坐标系进行简化后如图4所示。对应的各杆参数表和关节变量列如表2所示。
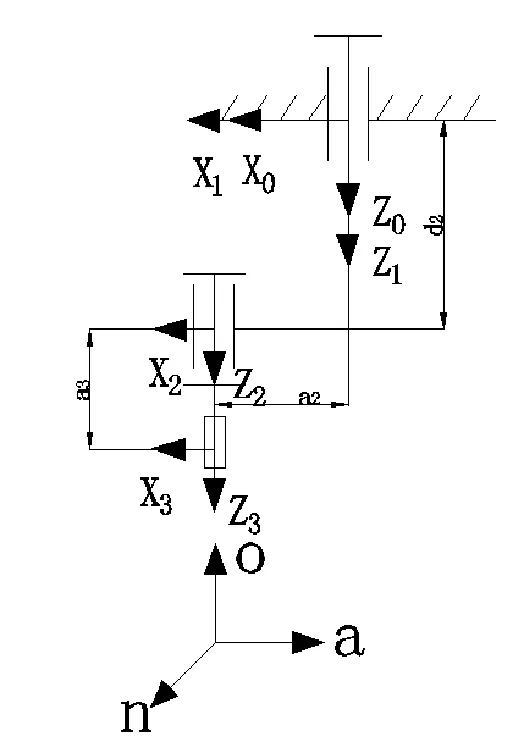
图4 旋转贴片头连杆坐标系
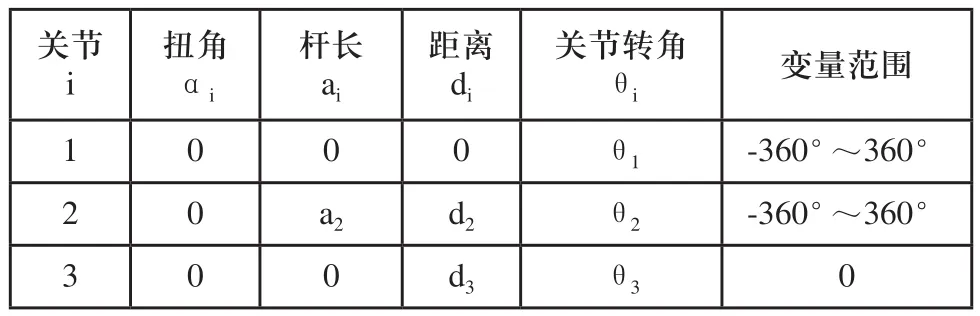
表2 旋转贴片头杆件参数和关节变量
依据连杆坐标系以及连杆参数,得出各连杆之间变换矩阵如下:
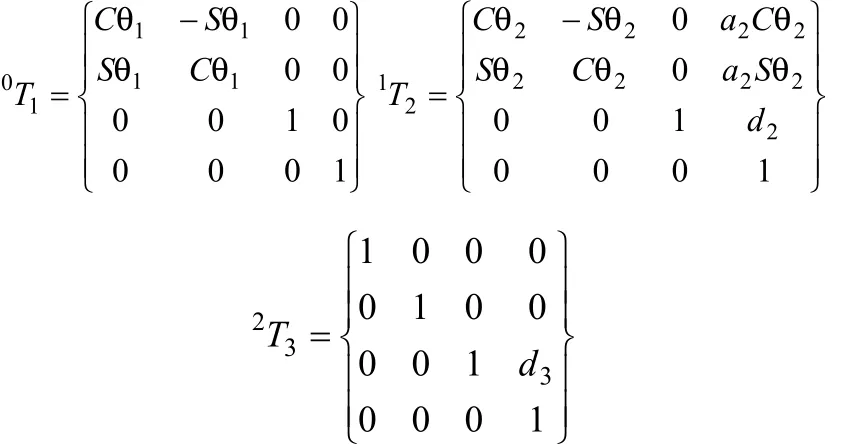
通过其次变换导出旋转贴片头执行器末端的运动学方程0T3,即:
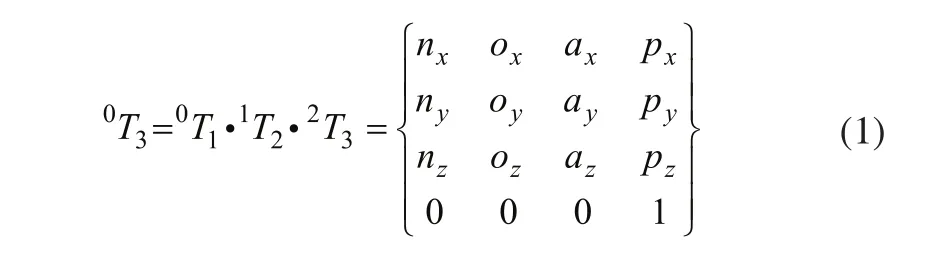
式(1)中:
由于末端执行器姿态已知,根据旋转贴片头执行器末端在某一时刻的位置,可以很轻易的求出θ1、θ2。
2.2 旋转贴片头仿真分析
2.2.1 旋转贴片头的三维模型建立
由于ADAMS能与其他的CAD三维软件(如Pro/E、SolidWorks、UG)无缝连接,我们在SolidWorks中建立其三维模型,再将建好的模型导入到ADAMS中并对其每一个构件的参数进行定义,并对各个零件添加运动副及施加驱动,其中主要约束为支撑座与大地锁定、基体,齿轮轴和和大地创建转动副、吸嘴杆组件和基体创建旋转副连接。
2.2.2 旋转贴片头ADAMS仿真
如图5所示,利用ADAMS软件提供的一般点驱动定义旋转贴片头吸嘴的运动轨迹,由吸嘴运动带动各个驱动轴运动,并通过ADAMS强大的测量功能得到对应的运动曲线。在后处理模块中,将得到的运动曲线转化为驱动轴运动的样条曲线,完成运动学反解过程。再由这些函数定义旋转贴片头的运动轨迹,从而完成运动学的正解[7],求解流程如图5所示。
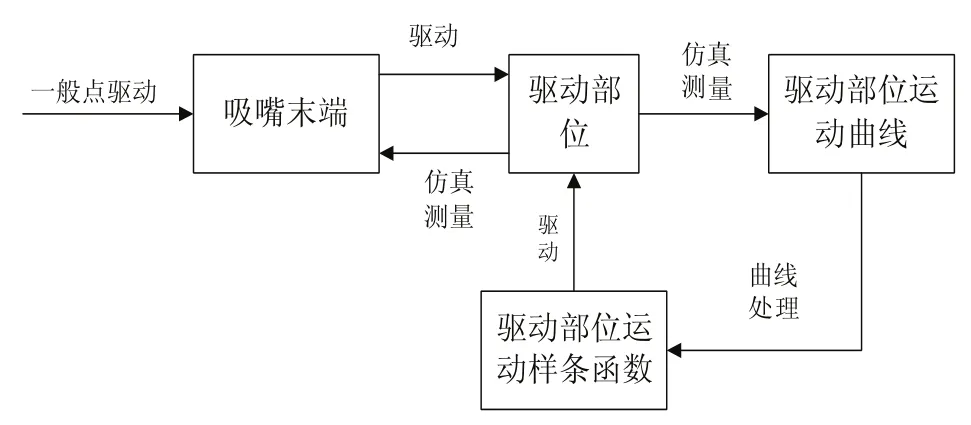
图5 求解流程
设定吸嘴的运动轨迹,设置吸嘴绕Z轴旋转及Z轴上下运动,在前0.3s内绕着Z轴旋转30°,之后用0.3秒向下运动10mm,贴装取芯片,在用0.3s回到原位。Z轴旋转运动和Z直线运动速度驱动方程为分别为:
V旋转=STEP(time,0,0,0.3,90d)
V直线=STEP(time,0.3,0,0.6,10)+STEP(time,0.6,0,0.9,-10)
设置仿真时间为1s,仿真步速100步。得到曲线如图6、图7所示。从图7中看到吸嘴在移动的时候位置是均匀变化的,到达吸贴位置后又匀速返回,符合设计要求。
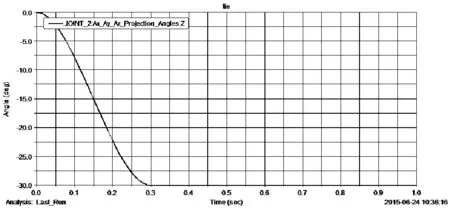
图6 吸嘴角度随时间变化曲线图

图7 吸嘴位移随时间变化曲线图
在ADAMS的后处理模块中,分别将吸嘴的角度—时间曲线、位移—时间曲线转化为样条曲线,并将样条曲线分别命名为spline_0和spline_1,用于定义旋转贴片头的运动,并且令一般点驱动失效,设定仿真时间为1s,仿真步速为100步,开始仿真。仿真完成后测量吸嘴末端运动轨迹[6.8]。
吸嘴末端相对于基体坐标系分别在X、Y、Z方向的位移、速度、角速度曲线及合成曲线如图6所示。
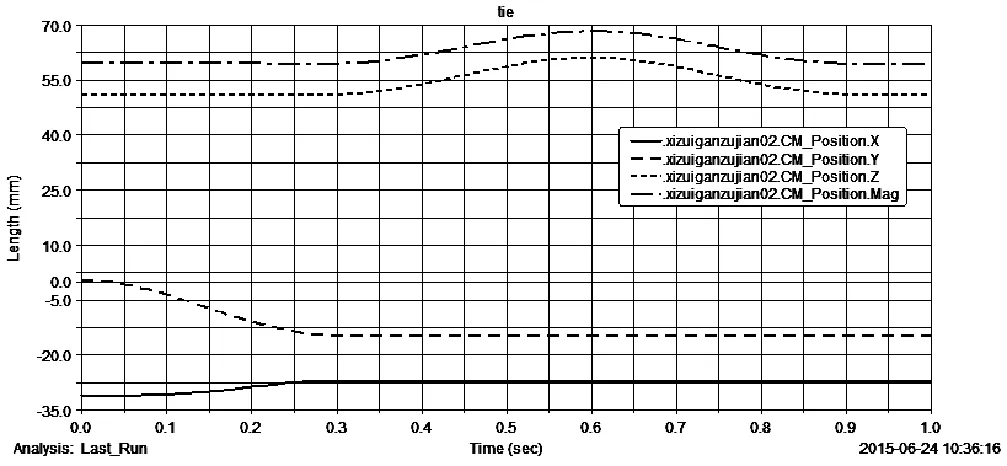
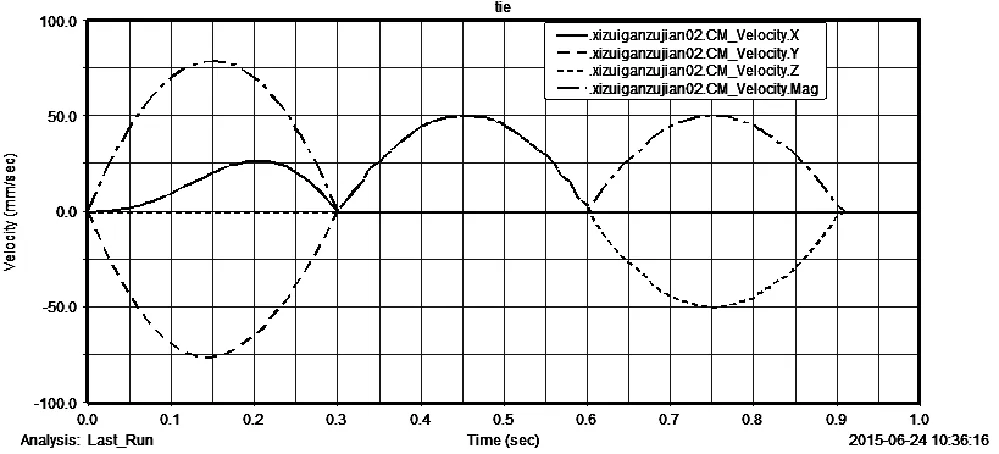
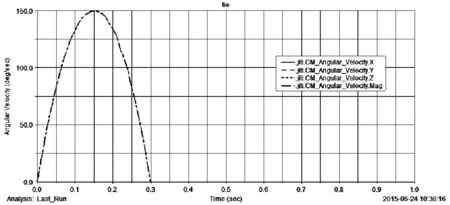
图8 吸嘴末端位移、速度、角速度及其合成仿真曲线
图8可以看出贴片头在一个贴装过程中位移、速度、角速度随时间变化图,0~0.3s对应的是贴片头旋转过程,0.3s~0.9s对应着一个吸嘴的贴装过程,仿真曲线与最初设置的一般点驱动的轨迹具有很好的相似性。说明求解出来的驱动函数是准确有效的。图8中吸嘴的速度与角速度曲线为正弦曲线,可以有效的用于指导驱动电机的运动控制。
3 结论
水平旋转贴片头整体结构紧凑,体积小,相对其他将贴装头简单组合在一起的结构,贴装头整体的惯量减小,既提高了贴装速度且对X-Y轴的加速度与速度影响不大,有效地解决了随着贴装头增加影响X-Y轴的机械性能的问题。
针对旋转贴片头进气管跟随贴片头旋转而影响贴片头工作的问题,本次设计采用进气管安装在支撑座上,利用轴套通气使得个个吸嘴杆实现真空与吹气,从而很好的解决这个问题。
运用D-H法建立运动学方程并运用ADAMS的运动学反解理论进行推导,通过其强大的测量和曲线分析功能,准确的获得了水平旋转贴片头吸嘴末端位移、速度、加速度,并为后期电机选型及电机控制提供参数依据,并且能有效的缩短开发周期,减少开发成本。
参考文献:
[1] 王剑薇,吴文镜.贴片机核心部件贴装头的设计技术进展[J].湖南工业大学学报.2014(01):22-25.
[2] 宋福民,肖永山.贴装头设计研究[J].电子工业专用设备. 2009(05):55-57.
[3] 宋福民,等.转盘式贴装头设计与检验研究[J].电子工业专用设备.2009(07):33-35.
[4] 刘少军,肖永山,宋福民.转盘式贴装头动力学仿真及实现[J]. 机械与电子.2006(07):64-67.
[5] 付宇.RFID标签封装设备贴装头设计与实现[D].华中科技大学,2011.
[6] 李军,邢俊文,覃文洁,等.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[7] 丁佳洛,战强.基于ADAMS 的串联机器人运动学反解与动力学优化[J].机电产品开发与创新,2008(01):09-11.
[8] 刘宏伟.基于ADAMS 的五自由度机器人运动学仿真[J].机电产品开发与创新,2008(6):42-44.
[9] 付红栓,赵恒华,杨辉.基于ADAMS 的并联机床动力学逆解仿真[J].机械设计与制造,2013(5):94-95.
[10] 杨海强,周灿丰,高辉.基于UG和ADAMS的水下爬壁机器人的设计和动力学分析[J].制造业自动化,2015(4):49-51.
【上接第48页】
体壁面的焊缝,另外运动过程中平稳,基本能够贴合所提供的轨迹运动,没有出现电机空转或者链条打滑情况,同时在船体壁面上运动时,自适应机构能有效地控制链条的吸附模块紧贴在壁面上运动,说明自适应机构有一定的曲面自适应能力,整个行走系统的设计是合理可靠的。
[1] 张广钦.中国船舶工业发展现状及未来展望[J].上海造船,2007,(4):10-11.
[2] 闫久江,赵西振,左干,李红军.爬壁机器人研究现状与技术应用分析[J].机械研究与应用,2015,3(28):52-54.
[3] 陈伟.船体抛光小型机器人弯翘曲面行走系统[D].宁波:宁波大学,2014.
[4] Hongjun Li,Jiujiang Yan,Yawen Liu,Wei Chen.Research status and analysis of technology application for magnetic adsorption wall-climbing robots in china[A].2015 International Conference on Mechanical and Electrical Engineering[C].2015.
[5] 桂仲成,陈强,孙振国.多体柔性永磁吸附爬壁机器人[J].机械工程学报,2008,44(6):177-182.
[6] Wei Chen,Hang Zhou,Jianming Zhan.Modeling and Simulation of Adaptive Surface Tracked Vehicle Based on RecurDyn Open[J]. Journal of Modelling and Simulation,2013,1,37-41.
[7] 衣正尧,弓永军,王祖温,王兴如.新型船舶壁面除锈爬壁机器人动力学建模与分析[J].机械工程学报,2010,46(15):23-30.
作者简介:付志斌(1989 -),男,江西丰城人,硕士,研究方向为高效电子制造装备。
基金项目:国家自然科学基金项目(面上项目,重点项目,重大项目)
收稿日期:2015-09-05
中图分类号:TP23
文献标识码:A
文章编号:1009-0134(2016)01-0049-04
