滩涂文蛤收获机挖掘铲的设计与分析
2016-03-23 03:37申屠留芳孙星钊张学生秦绍波
农机化研究 2016年11期
申屠留芳,张 炎,孙星钊,张学生,秦绍波
(1.淮海工学院 机械工程学院,江苏 连云港 222005;2.连云港市元天农机研究所,江苏 连云港 222006;3.连云港正业机械有限公司,江苏 连云港 222006)
滩涂文蛤收获机挖掘铲的设计与分析
申屠留芳1,张炎1,孙星钊2,张学生3,秦绍波3
(1.淮海工学院 机械工程学院,江苏 连云港222005;2.连云港市元天农机研究所,江苏 连云港222006;3.连云港正业机械有限公司,江苏 连云港222006)
摘要:滩涂文蛤具有很高的营养价值,而其采收多采用人工采集,劳动强度大,采收效率低。本设计为一种新型的文蛤收获机,作业宽度1 000mm,挖掘深度100~150mm,适合滩涂文蛤等贝类的采收。为研究机器在收获中遇到的阻力影响,对挖掘铲进行动力学分析设计,并通过受力分析构建工作阻力力学模型。同时,对挖掘铲进行静力学分析,添加载荷及约束,对挖掘铲进行有限元分析,得到挖掘铲的变形、应力及应变云图。计算结果与挖掘铲的材料性能对比,验证了设计的合理性。
关键词:文蛤收获机;参数;挖掘铲
0引言
我国海岸线绵长,自北向南大量的沿海滩涂文蛤养殖业产业,具有巨大的经济效益。文蛤类穴居深度在3~15cm,肉味鲜美,营养丰富,蛋白质含量高,氨基酸的种类组成及配比合理;脂肪含量低,不饱和脂肪酸较高,易被人体消化吸收,还有各种维生素和药用成分;有软坚、化痰之功效,有的贝类还有益精润肺的作用[1-2]。传统的采收由人工完成,劳动强度大,工作效率低,即使现有的机械化、自动化的采收设备只能进行深水海上作业,不能适应浅滩养殖的蛤类收获,而且集中化程度不高[3]。我国国立台湾大学农业机械工程学系与台湾省水产试验所台西分所联合开发完成收获及后处理装置,进行研制带花蛤深水捕捞机械进行海上作业,但是不能适应浅滩涂养殖的文蛤,而且集中化程度不高。
针对目前文蛤采收技术落后的现状,改变传统的收获方法,采用机器挖掘,利用机器上的输送链抖动输送,高压清洗,最后集装的方式完成,大大减轻渔民的劳动强度,提高了效率。采用机器化采收有广阔的前景,可解决目前存在的一系列问题,本设计效率稳定,操作方便,对沿海滩涂有很好的适应性。
1设计任务及主要技术参数
1.1 设计任务
滩涂自走式文蛤收获机的设计需要解决以下3个关键技术问题:一是滩涂泥沙较硬且具有较强的吸附性,采收时易吸附在挖掘铲和输送带上,影响机器正常运转;二是滩涂地质松软,采收机在行走中由于自身的重力和机器的振动会发生轮陷;三是文蛤的尺寸大小不同,为了让幼小的文蛤继续留在滩涂内进行再次生长,需要对其进行筛选分离。
本设计采用自走式履带拖拉机提供动力,以解决滩涂沦陷的问题[4-7]。工作时,前面挖掘铲通过液压系统控制,并配有喷水枪,以利于解决滩涂泥沙的吸附性困扰;中间的输送振动装置可以有效地分离打散泥沙;后面的分离滚筒可将幼小的蛤类将送筛孔中落下,撒落回滩涂面,再次生长。
1.2 主要技术参数
自走式文蛤收获机的主要技术参数如表1所示。
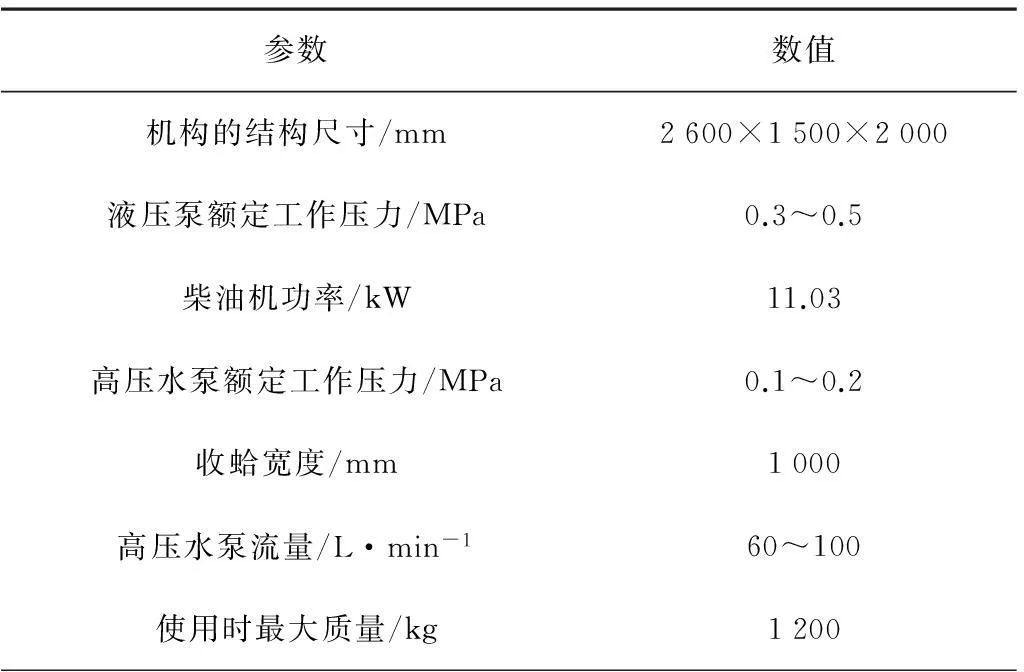
表1 自走式文蛤收获机的主要技术参数

续表1
2总体结构设计及其工作原理
2.1 总体结构
总体结构简图如图1所示。
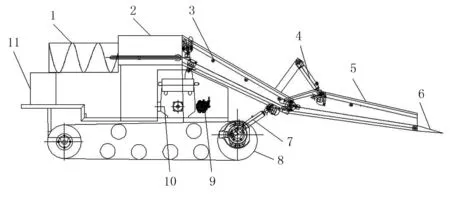
1.分离滚筒 2.操作台 3.输送带 4.液压油缸
2.2 工作原理
以履带式牵引机为载体,通过液压系统驱动液压缸控制挖掘铲的深浅,挖掘铲前配有喷水喷头,以解决滩涂泥沙附着问题。当挖掘铲挖起的泥沙混合物,经过振动机构后,部分的泥沙混合物经过震荡回落到滩涂,剩余部分泥沙及较大的文蛤经输送装置运送至机器后部的分离滚筒中,进行最后的分离筛选。整套设备由1台柴油机提供动力,并将机器的动力经皮带机链条输送至各部分机构。
3挖掘铲的设计及分析
为研究采收机在滩涂上运行时所受到的阻力影响,对挖掘铲进行了动力学分析,以确保实际运行中的可靠性。
3.1 挖掘铲设计
挖掘铲在挖掘文蛤时,需要深入土层15cm左右,为了确保能将所有文蛤挖尽,需要对挖掘铲挖掘的深度进行控制调节。因铲刃边缘和底部与土壤接触,会对挖掘铲产生很大的运动阻力,降低采收挖掘的速度和效率,因此要通过控制铲刃水平位置倾角α,使土壤可以沿挖掘铲顺利滑动,从而减小挖掘铲的阻力。
3.1.1挖掘铲水平位置倾角的确定
挖掘铲倾角的设计原则:在保证挖掘物不回落的前提下,能够使挖掘物沿着铲面顺利上升,并顺利输送到后面的振动及分离系统。挖掘面的受力分析如图2所示。[8]

图2 挖掘铲面受力分析
由图2力学分析得
G·sinα+f-F·cosα=0
(1)
F·sinα+G·cosα-N=0
(2)
f=u·N
(3)
联立式(1)~式(3)解得
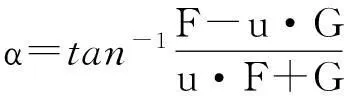
其中,F为挖掘铲的推力;N为铲面对挖掘物的反力;G为挖掘物所受的重力;μ为铲面摩擦因数;α为挖掘铲水平倾角。
3.1.2挖掘铲的铲体长度确定
根据挖掘铲平面尺寸的几何关系(见图3),即得
L=h/sinα
(4)
其中,h为挖掘铲的竖直高度;α为挖掘铲水平倾角。
设计挖掘铲宽幅1 000mm,铲面宽度400mm。

图3 挖掘铲结构参数
3.2 挖掘铲的动力学分析与建模
3.2.1土壤的受力分析
取铲面上中黏粒砂质土壤为研究对象,挖掘深度为15mm,受力情况如图4所示。
影响挖掘性能的土壤物理性质有土壤含水率、土壤内聚力因素C、土壤强度、土壤的附着力因素Cα、土壤密度ρ、土壤摩擦因素μ,以及土壤与挖掘铲之间的摩擦因素μ1等。进行受力分析,可列出如下的静平衡方程式[9-11]。
竖直方向上平衡方程为
G-N0(cosα-μ1sinα)-N1(cosβ-μsinβ)+
CaB0sinα+(CF1+FA)sinβ=0
(5)
水平方向上平衡方程

(6)
其中,G为土壤的重力;B0为挖掘铲的面积;N0为作用于铲面的法向载荷;N1为前失效面法向载荷;F1为土壤的剪切面积;FA为土壤运动的加速力;β为土壤的前失效面倾角。
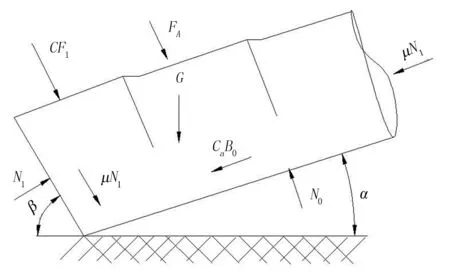
图4 挖掘铲面上土壤的力分析
3.2.2挖掘铲的受力分析
收获机工作时,挖掘铲主要受到机器牵引力F、铲面土壤作用的法向载荷、土壤的摩擦力Ff、土壤附着力Fa,以及土壤切削力Fb的影响,其受力分析如图5所示。
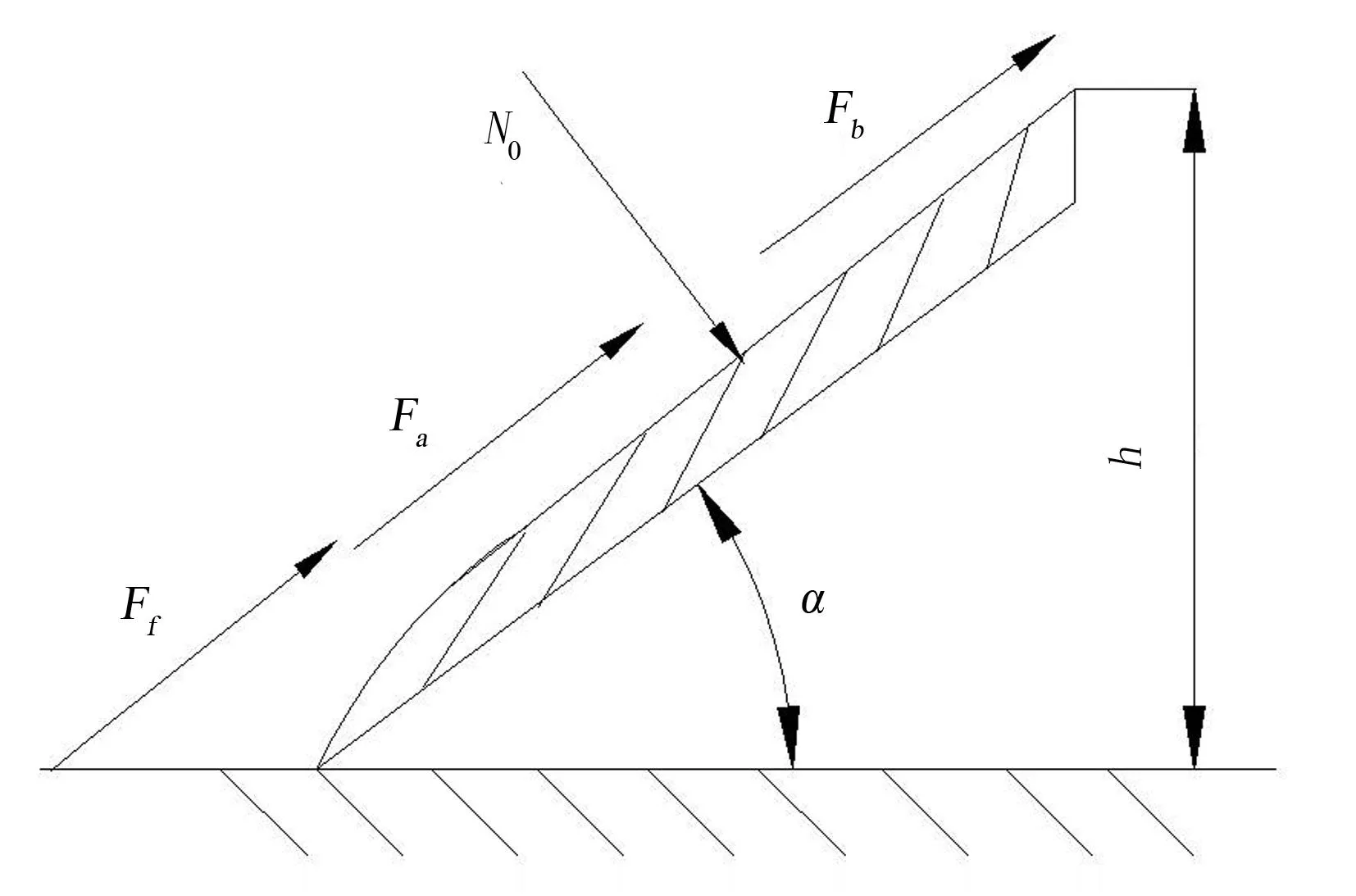
图5 挖掘铲受力分析
水平方向的平衡方程式为
F=N0sinα+(Ff+Fa+Fb)cosα
(7)
Ff=μN0,Fa=CaB0,Fb=kb
(8)
滩涂中的纯切削阻力很小,只有当土壤中有石头或刃口变钝时,切削阻力才显得重要。如果不存在这些情况,则土壤的纯切削阻力Fb可以忽略不计。即
F0=N0sinα+μN0cosα+C2B0cosα
(9)
联立式(5)、式(6),展开整理后得

(10)
将式(9)代入式(10)整理得
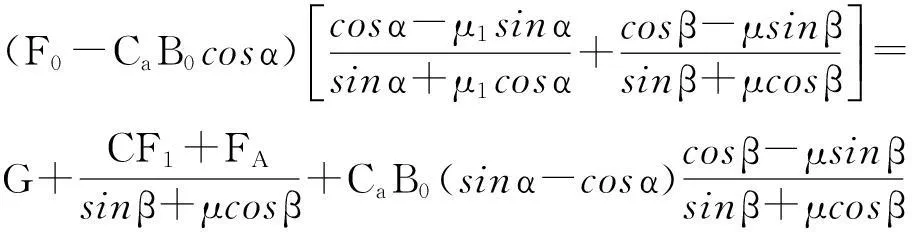
(11)


(12)
3.2.3动力学模型构建
土块速度与长度几何关系如图6所示。其中,L1为土壤沿铲尖伸出的距离(m);L3为土壤沿铲尾伸出的距离(m);L2为土壤铲尖至铲尾的距离(m)。

图6 土块速度与长度几何关系
挖掘铲面土壤重力为

(13)
(14)
(15)
其中,ρ为泥土密度;b为宽幅;H为挖掘深度。
土壤剪切面积为

(16)
土壤的加速力为

(17)
(18)
将式(13)、式(16)、式(18)代入式(12)后整理得

(19)
式(19)即为所求系统动力学模型,F0为忽略泥沙剪切力的挖掘铲推力。
设计参数各项取值如表2所示。

表2 设计参数各项数值
取α=20°,Ca=3,μ1=0.3,求解得 F0=1 200N。
3.2.4挖掘铲静力学分析
将建好的模型导入到WB软件中,进过网格划分,定义材料属性,生成有限元模型。
材料属性:挖掘铲厚10mm,挖掘深度150mm,弹性模量2.06×105N/mm2,密度7.8×10-6kg/mm3,泊松比0.3。网格划分后模型有1 008个实体单元,节点数为7 178,根据模型的受力情况添加约束载荷,挖掘铲受力有土壤法向力N、摩擦力f、挖掘阻力F,及土壤附着力等。由于其他载荷相对于法向力及摩擦力较小,可忽略不计。挖掘铲与机架固定板固定,铲部在泥土下,Y、Z方向受到约束,X方向为自由3个旋转方向为约束。
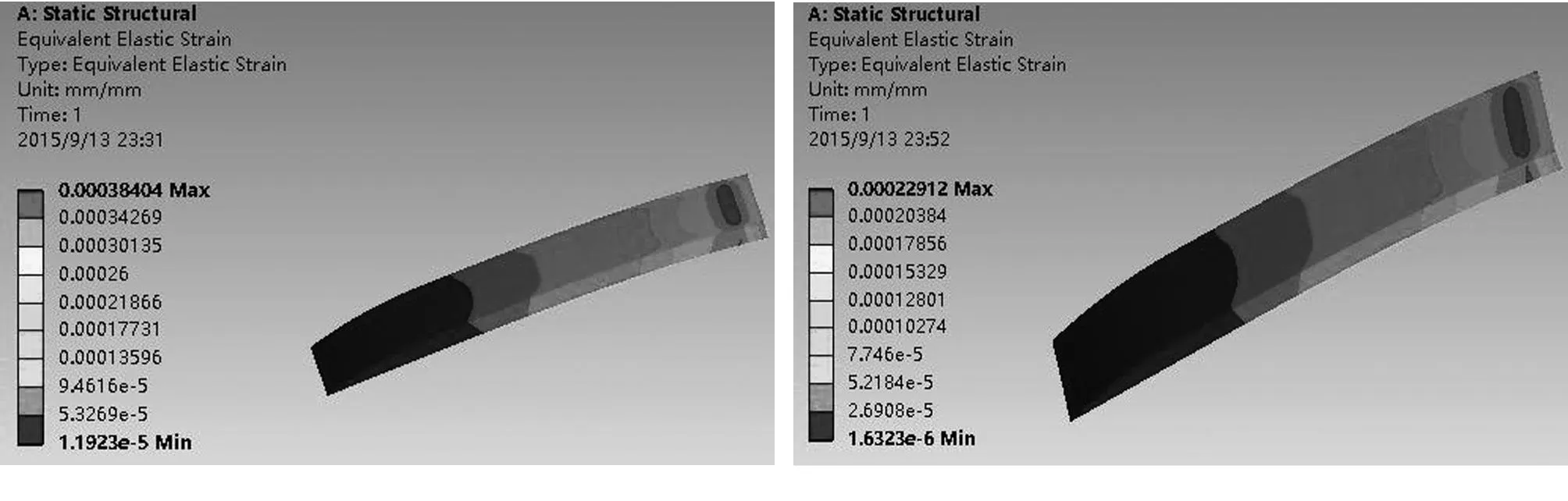
不同入土角壤对两种挖掘铲的阻力及导致效应力云图,如表1及图7~图9所示。

表3 不同入土角时土壤对两种挖掘铲的载荷及挖掘阻力

(a) 20° (b) 25°

(a) 倾角20° (b) 倾角25°
(a) 倾角20° (b) 倾角25°
1)从平面铲的总体应力分布可以看出:应力主要分布在挖掘铲中间与固定板接触的位置,随着入土角α的变化而变化,α为25°时的最大应力值为45.821MPa,α为20°时最大应力为76.805MPa,挖掘铲采用Q235碳素结构钢屈服极限强度为235MPa,因此挖掘铲强度满足设计要求。
2)通过分析平面铲变形云图可以得出:变形最大处位于铲尖,位移量最大为1.746mm,这个数值相对于整个铲长来说,肉眼观察不到,可以忽略不计。
4结论
本滩涂自走式文蛤收获机的设计结合了江苏沿海当前蛤类养殖发展特点、滩涂沙土粘性的独特地理条件及文蛤的实际生长状况,具有一定的实用价值。影响挖掘铲主要参数是运动过程中挖掘深度及铲倾角,在对各个参数适当调整后就可以得到最优的运动效果。本设计适用于沿海滩涂蛤类及其他贝类养殖的收获,可以完成挖掘、分离土壤和平铺在地面上的任务,降低人力需求,减轻农民的劳动强度,能够降低收获作业成本。
参考文献:
[1]王大海.海水养殖业发展规模经济及规模效率研究[D].青岛:中国海洋大学,2014.
[2]万宇.江苏南通文蛤产业结构与特征初步研究[D].青岛:中国海洋大学, 2014.
[3]张世军.中国蛤类产业结构与特征研究——以“红岛蛤蜊”产业为例[D].青岛:中国海洋大学,2014.
[4]周勇,徐川其.加快我国船式拖拉机产业发展的建议[J]安徽农业科学, 2015(1):354-355,392.
[5]戴性武. 全浮式两轮驱动机耕船: 中国,ZL20062005035
8.6[P].2007-05-09.
[6]凌淦文, 莫宏斌.高效双滚机耕船的试验研究[J].广西农业机械化, 2004(6):31-32.
[7]庄金灿.船式拖拉机的开发与应用[J].山东农机,2002(1):9-11.
[8]孙伟刚,王春光,孙宏,等.马铃薯挖掘机挖掘铲力学模型构建[J].农机化研究,2014,36(1):84-86.
[9]陈书法,李耀明,孙星钊.花生挖掘铲动力分析与实验[J].农业机械学报,2005(11):59-63.
[10]石林榕,孙伟,王蒂,等.马铃薯仿生挖掘铲的设计与仿真[J].干旱地区农业研究,2014(32):268-272.
[11]邓伟刚,孙宏,王春光.马铃薯挖掘铲工作阻力计算与分析[J].农机化研究,2014,36(10):71-74.
Beach Clam Harvester Design and Analysis of Digging Shovel
Shentu Liufang1,Zhang Yan1,Sun Xingzhao2,Zhang Xuesheng3, Qin Shaobo1
(1.HuaiHai Institute of Technology,Lianyungang 222005,China;2.Lianyungang Yuantian Agricultural Machinery Research Institute,Lianyuangang 222006,China;3. Lianyungang Zhengye Machinery Manufacture Corporation, Lianyuangang 222006,China)
Abstract:Beach clam has a high nutritional value, China clam harvesting by hand-picked, labor intensive,low efficiency of oil recovery.This design for a new of paper clam harvest machine, job width 1000mm , for Beach paper clam, shellfish of harvest,mining depth 100-150mm, for research machine in harvest in the encountered of resistance effect,special on mining shovel for Dynamics analysis design, and through by force analysis building work resistance mechanical model,last statics analysis shovel for, added load Yu constraints , on mining shovel for limited Yuan analysis,get mining shovel of deformation, and stress,and strain contours, comparison of results with the digging shovel the material properties,verify that the rationality of the design.
Key words:calm harvesters; parameter; digging shovel
中图分类号:S972.69+1
文献标识码:A
文章编号:1003-188X(2016)11-0113-05
作者简介:申屠留芳(1965-),女,浙江东阳人,副教授,博士,(E-mail) stlf@hhit.edu.cn。
基金项目:江苏省科技支撑计划(农业)子项目(BE2014339-3);连云港市“521工程”项目(2015-2017)
收稿日期:2015-10-20