差速转向农业专用AGV小车的设计与模糊控制研究
2016-03-23 03:33赵晨宇陈息坤
农机化研究 2016年11期
关键词:模糊控制
赵晨宇,陈息坤
(上海大学 机电工程与自动化学院,上海 200072)
差速转向农业专用AGV小车的设计与模糊控制研究
赵晨宇,陈息坤
(上海大学 机电工程与自动化学院,上海200072)
摘要:农业专用自动导引小车(AGV)作为农业作业的通用运载平台,是针对具体应用环境而设计的特定用途机器人,已成为农业自动化的一个重要发展方向。为此,介绍了一种基于多轴运动控制器的现代农业自动化AGV小车。同时,针对差速转向驱动型AGV小车路径跟随问题,首先对该AGV系统进行了理论分析和运动学建模;然后应用模糊控制理论,设计了以距离偏差和角度偏差为输入、左右驱动轮速度差为输出的模糊控制器;最后,在MatLab/Simulink环境中进行仿真验证。仿真结果表明:设计的模糊控制器在直线和圆周路径上跟踪性能明显优于常规PID控制器,其有效性和可行性得到了验证。
关键词:农业专用AGV;差速转向;多轴运动控制器;模糊控制;轨迹跟踪
0引言
自动导引小车(Automated Guided Vehicle, AGV),是指配备有自动导引装置的移载运输小车,以控制器为核心,以蓄电池为动力,能按预先规划好的路径安全、自主行驶,并完成指定运输动作的无人驾驶自动化搬运车辆[1]。自动导引小车具有环境感知、实时决策和行为控制与执行等功能,是当代柔性生产线、装配线和仓储物流自动化系统的关键设备之一[2]。随着各个领域的相互渗透,AGV小车越来越多地应用于农业自动化生产线中[3]。
农业专用AGV小车行驶环境复杂多样,可装载不同机械装置以完成各种作业,因而对控制器的精确性、实时性及鲁棒性提出很高要求,其运动控制已成为AGV小车研究的关键领域之一,是AGV小车进行定位、自主导引和路径规划等的基础。传统的运动控制常采用PID控制算法,特点是算法简单、鲁棒性强、可靠性高,但须基于精确的数学模型才能达到良好的控制效果。而AGV小车是非线性复杂系统,运动过程受诸多非线性因素的影响,对其建立精确的数学模型十分困难。因此,传统的PID控制算法已难以满足其要求。
为使AGV小车获得较好的控制性能,本文应用模糊控制方法,根据人的驾驶经验得到一系列控制规则,经推理得到控制响应表,通过查表得到规划信息,实现AGV小车局部位姿的有效控制[4]。经过MatLab/Simulink仿真验证了本文提出方法的有效性和准确性。该方法计算量小,运算速度快,跟踪性能优越,适用于现代农业专用AGV系统[5]。
1农业专用AGV小车系统结构
本文控制对象为应用于现代农业蔬菜大棚的专用AGV小车,最大负重400kg。该农业自动化系统实际构建主要分为农业专用AGV小车系统、作物生长环境远程监测系统及作物生长环境专家系统,如图1所示。

图1 农业自动化系统结构示意图
该农业自动化系统利用农业专用AGV小车视觉系统、专用执行机构及多功能末端执行机构对植株生长微环境信息(叶面温度、光合作用、水分含量、植株生长状态、电导率和根部温度等)进行巡视和检测,获取植株生长相关数据,为构建植物生长智能专家系统提供支撑。基于知识决策的作物生长专家系统,为实现温室作物的高产、高品质提供决策辅助基础。
AGV小车系统是整个系统的运输载体,利用车体上搭载的智能检测装置和轮上安装的编码器联合进行定位,仿人形轻型机械臂安装在AGV小车上,承载着智能灵巧终端实现三维空间位移,完成作物生长实时数据采集和植株生长状态检测。
该系统采用TCP/IP通讯方式,可借助无线路由器与外界进行数据及指令交互,具有可多点传输及传输数据量大等特点,方便实现网络化、系统化控制。工业PC机作为中央控制器,管理、协调、调度整个农业自动化系统的工作情况。AGV小车系统由固高8轴运动控制器进行控制,其中,2轴用于行走机构,1轴用于升降机构,5轴用于专用检测机构。智能AGV系统组成架构如图2所示。

图2 智能AGV系统组成架构
本文所研究AGV小车为四轮结构,车体前端左右两侧对称安装两个独立的驱动轮,分别由两台无刷直流电机控制其转速,确保驱动系统结构简单、运行可靠、维护方便、能量转换效率高。后端两轮以万向轮形式形成从动轮,依靠驱动轮的差速差实现对小车运动方向的控制[5]。
2差速转向AGV小车运动学分析
两轮差速转向AGV小车运动学结构简图(图中仅画出两驱动轮)如图3所示。

图3 AGV运动学示意图
根据运动学的知识有:车体的合成速度VC(即C点的速度)与左、右轮速度V1、V2关系为

(1)
假设图示时刻,AGV小车通过两驱动轮差速进行姿态纠偏。显然,AGV小车左轮速度大于右轮速度即V1>V2,左右轮的轨迹都表现为一段圆弧,AGV发生右转。根据圆周角定理,左右轮对应的圆心角相等[7],可得到

(2)

(3)
在Δt时间内,小车的转弯半径R、转过的角度Δθ和角速度ω分别可表示为
(4)

(5)

(6)
在XOY坐标系中,小车在X轴和Y轴的方向上速度分量为
(7)
AGV小车左转时运动学方式同法可得。
综上可得,AGV整车运动状态的输入为左右轮转速V1、V2,输出为AGV中心点的位姿矩阵ξt,则小车每一时刻位姿的运动学方程为

(8)
其中,X0、Y0、θ0为t=0时小车的初始状态值。
由此,通过AGV小车两轮不同的速度规划,可得到AGV相应的运动状态:
1)当V1=V2时,小车沿着θ0做直线运动;


3模糊控制系统设计
3.1 控制系统设计


图4 模糊控制系统框图
3.2 模糊控制器设计
如图5所示,本文将小车实时位姿与期望位姿比对结果:距离偏差ED和角度偏差Eθ,作为模糊控制器的两个输入变量,左右驱动轮速度差ΔV作为输出变量。该模糊控制器为双输入单输出的模糊控制器。
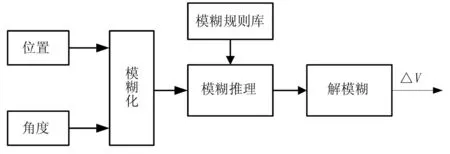
图5 模糊控制器结构框图

考虑到三角形隶属度函数的灵敏度较高且数学表达式和运算较为简单[10],因此对ED、Eθ、ΔV均选取均匀分布的三角形隶属度函数形式,同时选取两两模糊集合重叠时的最大隶属度∂=0.5,如图6所示。

图6 隶属度函数
模糊推理采用Mamdani方法,根据人驾驶汽车的操作经验总结出49条模糊控制规则,如表1所示。

表1 模糊控制规则表
当小车位于轨道左边,且行驶方向趋近预定轨道(向右转弯)时,即ED<0,Eθ<0,如图7(a)所示。当两者偏差均为负大时,模糊控制器输出应为零,因此时小车正逐步往轨道方向靠近。当小车与预定轨道偏差距离不变,偏差角度为负中或负小时,可使模糊控制器输出正小或正中,对小车姿态作出微调。当小车位于轨道左侧,但行驶方向背离预定轨道(向左转弯)时,即ED<0,Eθ>0,如图7(b)所示。此时模糊控制器须输出正大,使小车逐步接近预定轨道。同理,小车位于预定轨道右侧时,亦可根据上表1对小车作出调整。当小车沿着轨道行驶,即ED=0,Eθ=0,模糊控制器输出为零,保持小车左右两驱动轮速度差不变,继续延原行驶方向前进[11-12]。

(a) (b)
4仿真验证
本文利用MatLab/Simulink平台搭建了研究对象的数学模型,左右驱动轮的轴距D=0.5m,小车的平均合成速度VC=0.6m/s。经分析知,AGV的工作路径由圆弧轨道和直线轨道组合而成。因此,本文分别利用常规PID控制器和模糊控制器对建立好的数学模型进行闭环控制,对小车在直线和圆形两种路径下的跟随效果进行了仿真比较。
4.1 直线路径

图8 直线路径下常规PID控制仿真结果
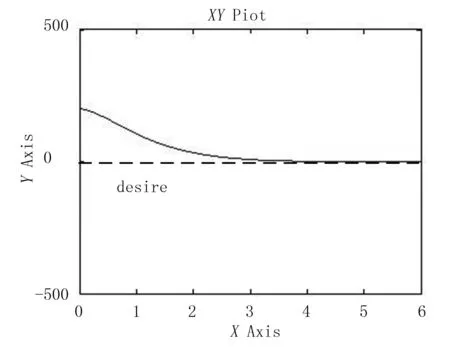
图9 直线路径下模糊控制仿真结果
两种控制下的距离偏差ED和角度偏差Eθ仿真结果如图10和图11所示。

图10 距离偏差ED仿真结果

图11 角度偏差Eθ仿真结果
4.2 圆形路径


图12 圆形路径下常规PID控制仿真结果
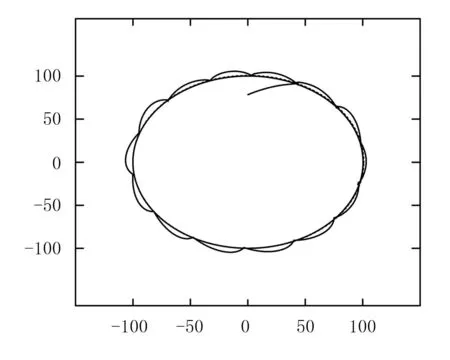
图13 圆形路径下模糊控制仿真结果
从直线轨迹和圆形轨迹的仿真结果可以看出:模糊控制相比常规PID控制,系统的超调量更小甚至得到消除,调节时间更短,动态特性更好。采用该控制方法可有效地对AGV小车进行偏差纠正和路径跟随。
5结论
本文研究了一种基于多轴运动控制器的差速驱动型农业专用AGV小车,在分析该小车运动学模型的基础上,设计了一种适用于该系统的模糊控制器,并在MatLab/Simulink中进行仿真验证。
仿真结果表明:与常规PID控制器相比,采用设计的模糊控制器可使AGV系统在直线路径和圆形路径下跟踪性能良好,具有很强的适应性和鲁棒性。在常规的生产中,本研究所用方法具有较大的参考价值。
参考文献:
[1]尚婕,姜文刚,蔡蓝图.差速转向的农用自动引导小车控
制系统设计[J].江苏科技大学学报:自然科学,2011,25(5):453-456.
[2]杨远航,方庆琯.基于模糊控制的AGV轨迹跟踪研究[J].起重运输机械, 2011(2):16-18.
[3]凤俊翔.AGV小车TCP/IP通讯功能的设计与实现[J].安徽农业科学,2010,38(20):10919-10922.
[4]温素芳,朱齐丹,张小仿.基于模糊控制器的移动机器人路径规划仿真[J].应用科技, 2005, 32(4):31-33.
[5]李鑫,卢刚,李声晋,等.基于模糊PID算法的轮式机器人驱动轮控制器设计[J]. 微特电机, 2011, 39(11):57-59.
[6]卢杉.基于单片机的差速驱动导引小车运动控制[D]. 西安:西安理工大学, 2010.
[7]黄胄.基于PLC控制的AGV技术研究及其应用[D].上海:华东理工大学,2013 :16-18.
[8]Min Huang, Dagui Huang. Embedded Fuzzy Logic Control of AGV in Path Tracking. Proceedings of the 2010 IEEE International Conference on Mechatronics and Automation [C]//Xi'an, China.2010 :682-686.
[9]陆磊.模糊PID控制在轮式机器人上的应用[J].微型电脑应用, 2010, 26(12):31-33.
[10]朱天宇,谭琳.激光引导四轮驱动型AGV小车模糊控制的研究[J].机电工程,2013,30(8):1025-1028.
[11]宋立博, 李劲松, 费燕琼.四轮差动驱动型AGV嵌入式运动控制器设计与研究[J].中国机械工程, 2008(19):2903-2907.
[12]陈启军, 王月娟, 陈辉堂. 基于PD控制的机器人轨迹跟踪性能研究与比较[J].控制与决策,2003, 18(1):53-57.
Study on Fuzzy Control of an Agricultural Dedicated AGV with Differential Steering
Zhao Chenyu, Chen Xikun
(The School of Mechanical Engineering and Automation, Shanghai University, Shanghai 200072, China)
Abstract:As a common platform for agricultural operations, agricultural automatic guided vehicle (AGV) is a kind of robot that is particularly designed for specific application environment. It is becoming more and more important in agricultural automatic.An AGV used in automation of modern agriculture based on multi axis motion controller is proposed.Aiming at AGV path following problem,a kinematic model of the AGV is established and analyzed. Then a fuzzy controller with distance deviation and angle deviation as inputs, difference of left and right wheel’s speed as output is designed, based on fuzzy control theory. Finally, the control system is simulated in the simulink module of the Matlab platform. The results indicated that the system follows in the linear and circular path on a clear advantage than the conventional PID control system. Its effectiveness and feasibility has been verified.
Key words:agricultural dedicated AGV; differential steering; multi axis motion controller; fuzzy control; trajectory tracking
中图分类号:S24
文献标识码:A
文章编号:1003-188X(2016)11-0123-05
作者简介:赵晨宇(1990-),女,河南南阳人,硕士研究生,(E-mail)whisper2013@hotmail.com。通讯作者:陈息坤(1962-),男,河南信阳人,副教授,博士,(E-mail)chenxk@shu.edu.cn。
基金项目:上海市科委重点项目(14DZ1206302)
收稿日期:2015-10-04
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
制造技术与机床(2017年7期)2018-01-19
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22