基于模糊PID自动转向控制系统的研究
2016-03-23 03:33张长龙李文春
农机化研究 2016年11期
关键词:拖拉机
张长龙,李文春,马 蓉,任 玲,石 翔
(1.石河子大学,新疆 石河子 832003;2. 新疆阿拉尔万达农机有限公司,新疆 阿拉尔 843300)
基于模糊PID自动转向控制系统的研究
张长龙1,李文春2,马蓉1,任玲1,石翔1
(1.石河子大学,新疆 石河子832003;2. 新疆阿拉尔万达农机有限公司,新疆 阿拉尔843300)
摘要:在拖拉机自动转向控制系统中,为了提高自动转向性能,满足工作需求,设计了参数自整定的模糊PID控制。同时,对模糊控制规则进行了设计,实现对PID3个输出比例因子进行实时修改,提高了系统的控制性能。对模糊PID在MATLAB中进行了建模仿真,通过仿真结果可以看出:该控制方法有很好的稳态精度和自适应能力,明显改善了系统的动态特性,有利于拖拉机自动驾驶精度的提高。通过台架实验,验证了该控制方法的可行性。
关键词:自动转向;参数自整定;模糊PID;拖拉机
0引言
拖拉机自动驾驶技术的应用有利于实现精准农业的发展,在自动转向控制系统中,控制算法的选择、设计及优化的好坏,直接影响拖拉机的行走精度[1-3]。目前常用的PID控制算法是使用最广泛的控制策略,其控制原理简单、稳定性好,但其参数一经确定后无法根据拖拉机前轮角度的大小变化进行调整,影响拖拉机的行走精度。模糊控制主要是根据人们的经验而不依赖于控制模型,由于它对控制对象只进行简单的模糊处理,从而降低了在实际工作中的控制精度,影响了动态运动品质。而参数自整定的模糊PID控制能很好地满足拖拉机自动驾驶的需要,不仅保留了常规的PID控制系统控制原理简单、使用方便、鲁棒性强的特点,而且具有较强的适应性、灵活性和精确性,能够根据前轮角度控制的大小,实时调整算法的输出比例因子,具有较强的自适应能力。
为了提高拖拉机自动转向的控制精度,本文设计了参数自整定的模糊PID控制,通过在线实时修改比例因子,以得到更优的控制效果。
1自动转向控制原理
在导航过程中,经路径跟踪算法计算出目标转角后,通过CAN总线将目标转角传递到下位机,下位机中的自动转向控制器控制目标转角的执行;转向算法根据目标转角和当前前轮转角的差值(角度传感器提供当前前轮角度反馈),计算出步进电机的转动方向与速度,驱动步进电机,带动全液压转向器,实现拖拉机前轮自动转向[4]。系统结构如图1所示。
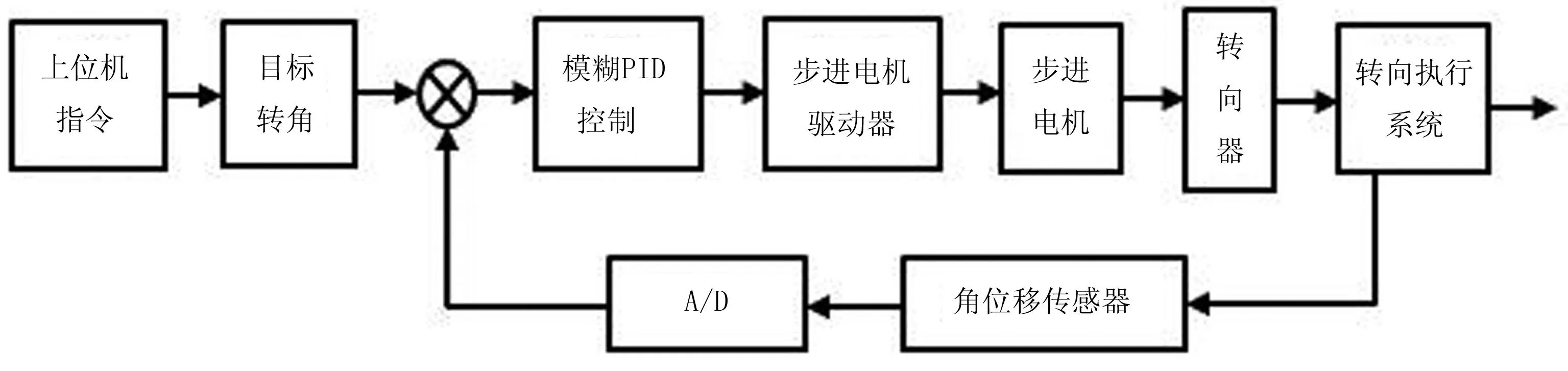
图1 自动转向控制原理图
控制算法的好坏直接影响拖拉机沿预定义路径行驶的精度,本文设计了参数自整定的模糊PID控制算法。通过仿真研究表明:该控制算法在一定程度上能够提高拖拉机的行走精度;;通过台架实验验证了该控制方法的可行性。
2模糊PID自动转向控制系统
2.1控制器结构
模糊PID控制系统[5-9]由PID控制器与模糊控制器共同连接构成,并由模糊控制器控制PID的控制参数,实现PID控制参数在不同时刻、不同状态下具有不同的输出比例因子。系统的结构如图2所示。
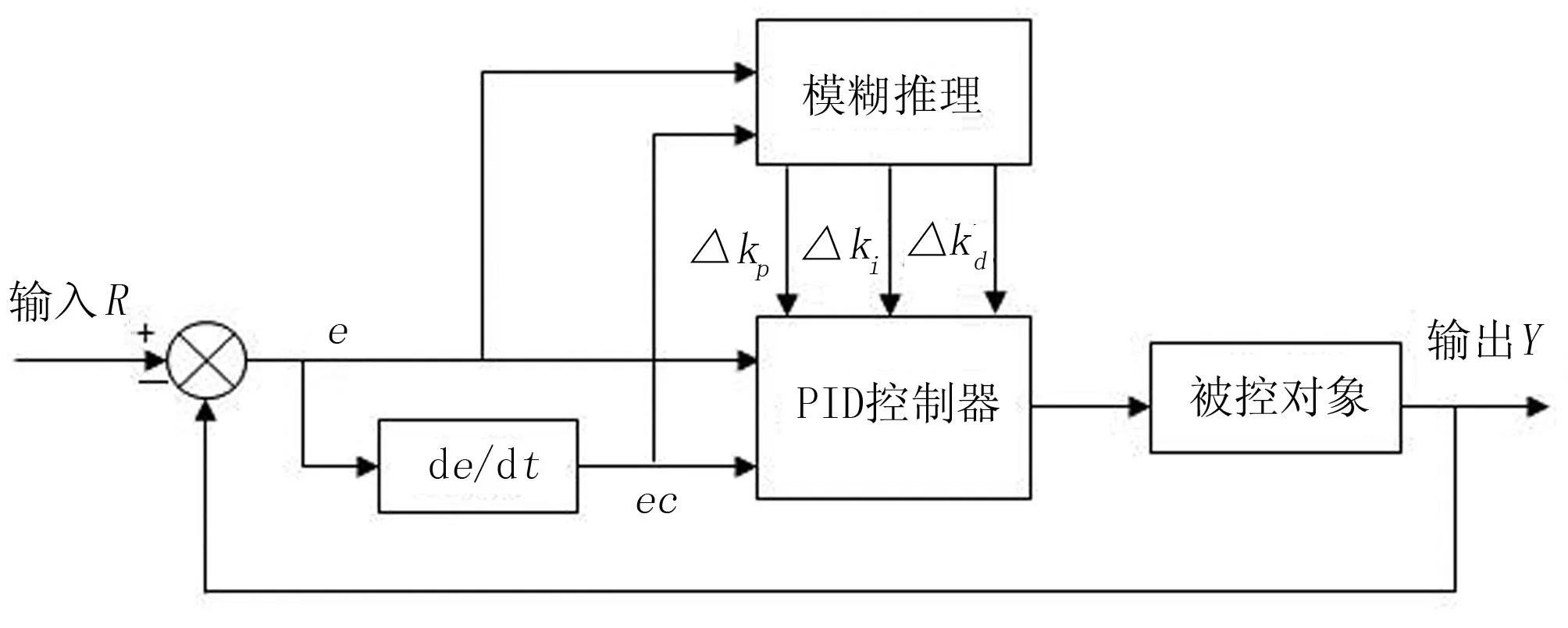
图2 模糊PID结构图
由图2可以看出:输入到PID控制器的偏差e和偏差变化率ec同时输入到模糊控制器中,模糊控制器根据模糊推理控制规则不断得出参数修正量Δkp、Δki、Δkd,并输入到PID控制器中。此时系统实时的参数取值应该分别为kp+Δkp、ki+Δki和kd+Δkd,实现了PID控制算法中3个比例因子的在线实时修改。
2.2 PID控制器的模糊规则
PID控制算法的参数之间,以及与偏差e和偏差变化率ec之间的相互关系,如下所述。
1)当|e(t)|较大时,为提高转向系统的响应速度,减小步进电机的超调,应取较大的kp和较小的kd;同时,为了避免步进电机出现较大的超调,取ki=0。
2)当|e(t)|处于中等大小时,为减小转向控制系统的超调,提高步进电机的响应速度,应取较小的kp,kd的取值要适中;此时可适当增加一点ki,但不得过大。
3)当|e(t)|较小时,为了提高自动转向系统的稳定性,避免控制系统在稳定时出现不必要的振荡,kd和ki的取值要适中。
根据偏差e与3个控制参数kp、ki、kd间的关系,考虑偏差变化率|ec(t)|的影响,得出调节修正PID控制器3个参数的模糊控制规则表分别如表1~表3所示,模糊控制规则对应的表面查看图如图4~图6所示。其中,模糊控制器输入输出变量的模糊子集分别为e、ec、Δkp、Δki、Δkd,变量的语言值为{负大,负中,负小,零,正小,正中,正大},记为{NB,NM,NS,Z0,PS,PM,PB}。
模糊推理输出的Δkp、Δki、Δkd均使用如图3所示的隶属度函数。
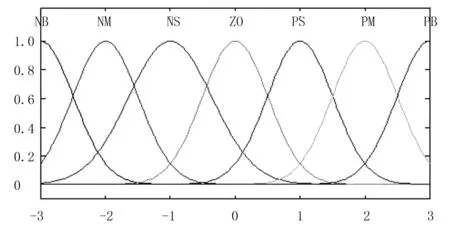
图3 Δkp、Δki、Δkd的隶属函数图
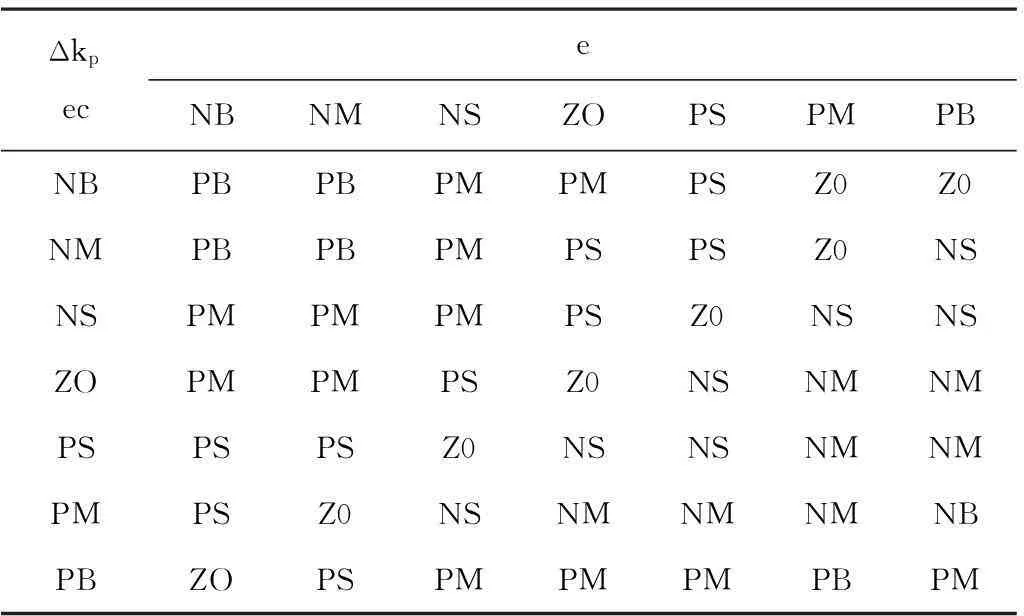
ΔkpeceNBNMNSZOPSPMPBNBPBPBPMPMPSZ0Z0NMPBPBPMPSPSZ0NSNSPMPMPMPSZ0NSNSZOPMPMPSZ0NSNMNMPSPSPSZ0NSNSNMNMPMPSZ0NSNMNMNMNBPBZOPSPMPMPMPBPM

表2 Δki模糊控制规则表
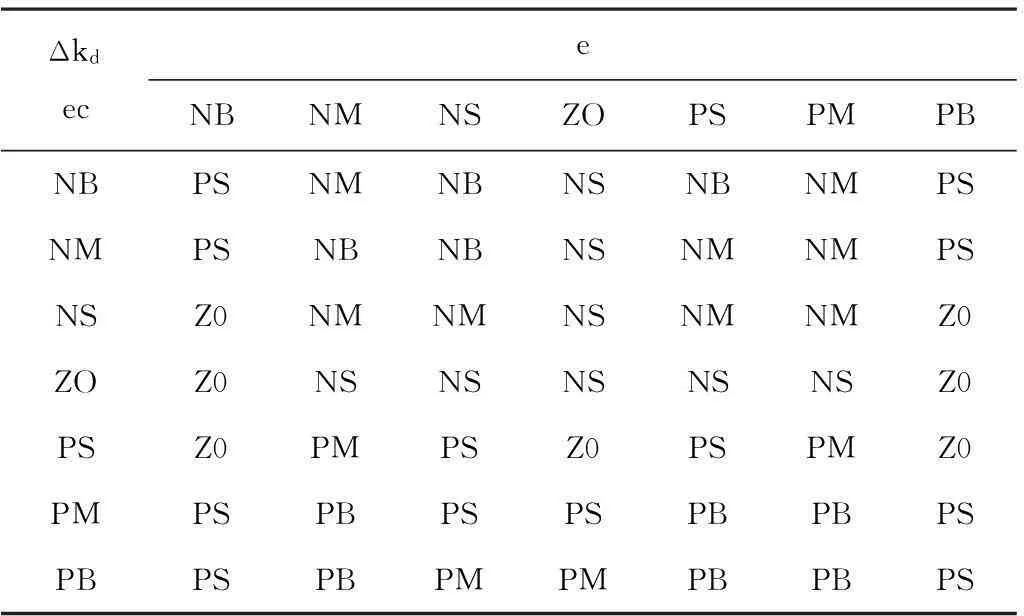
表3 Δkd模糊控制规则表
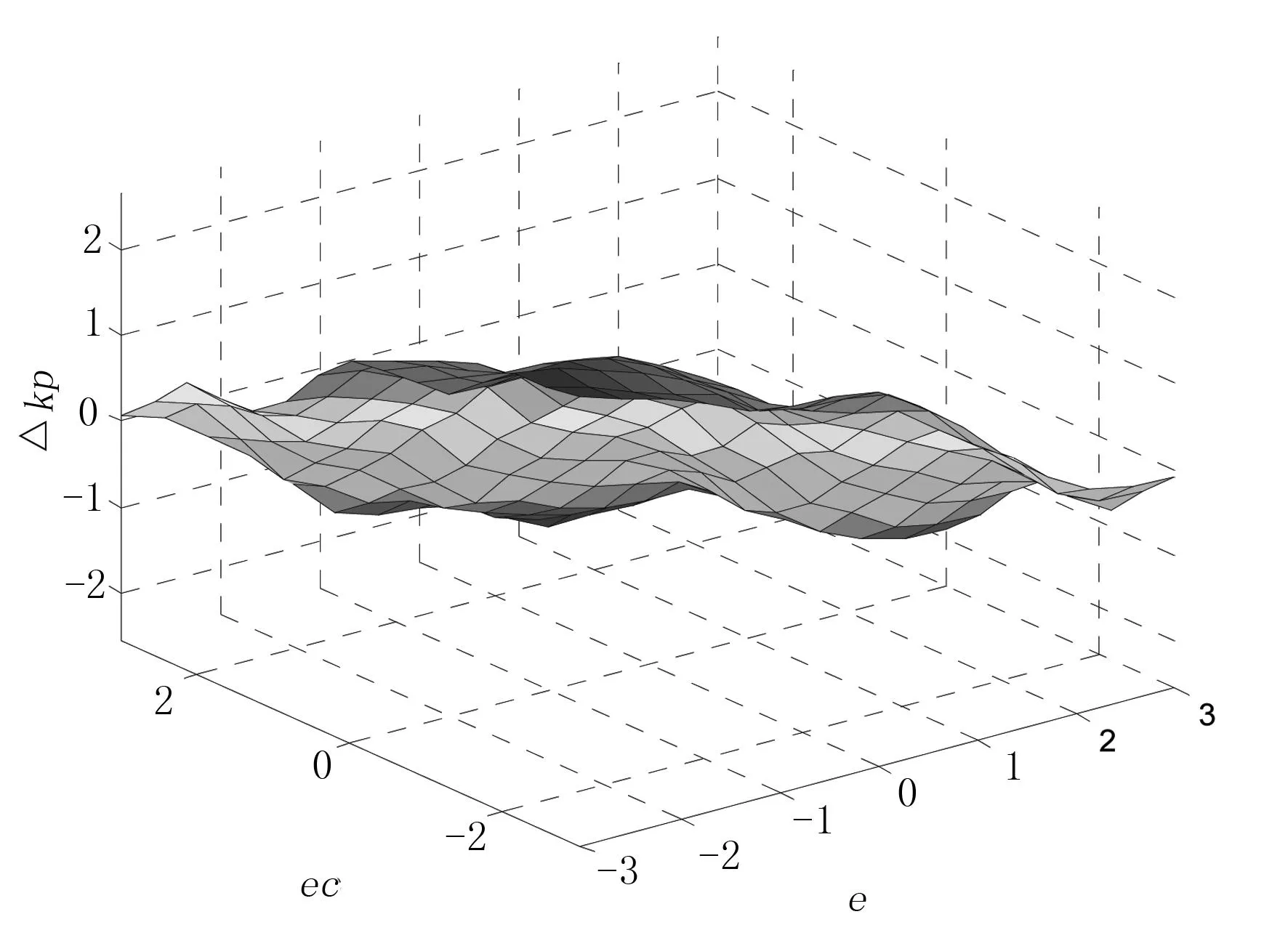
图4 Δkp的表面查看图
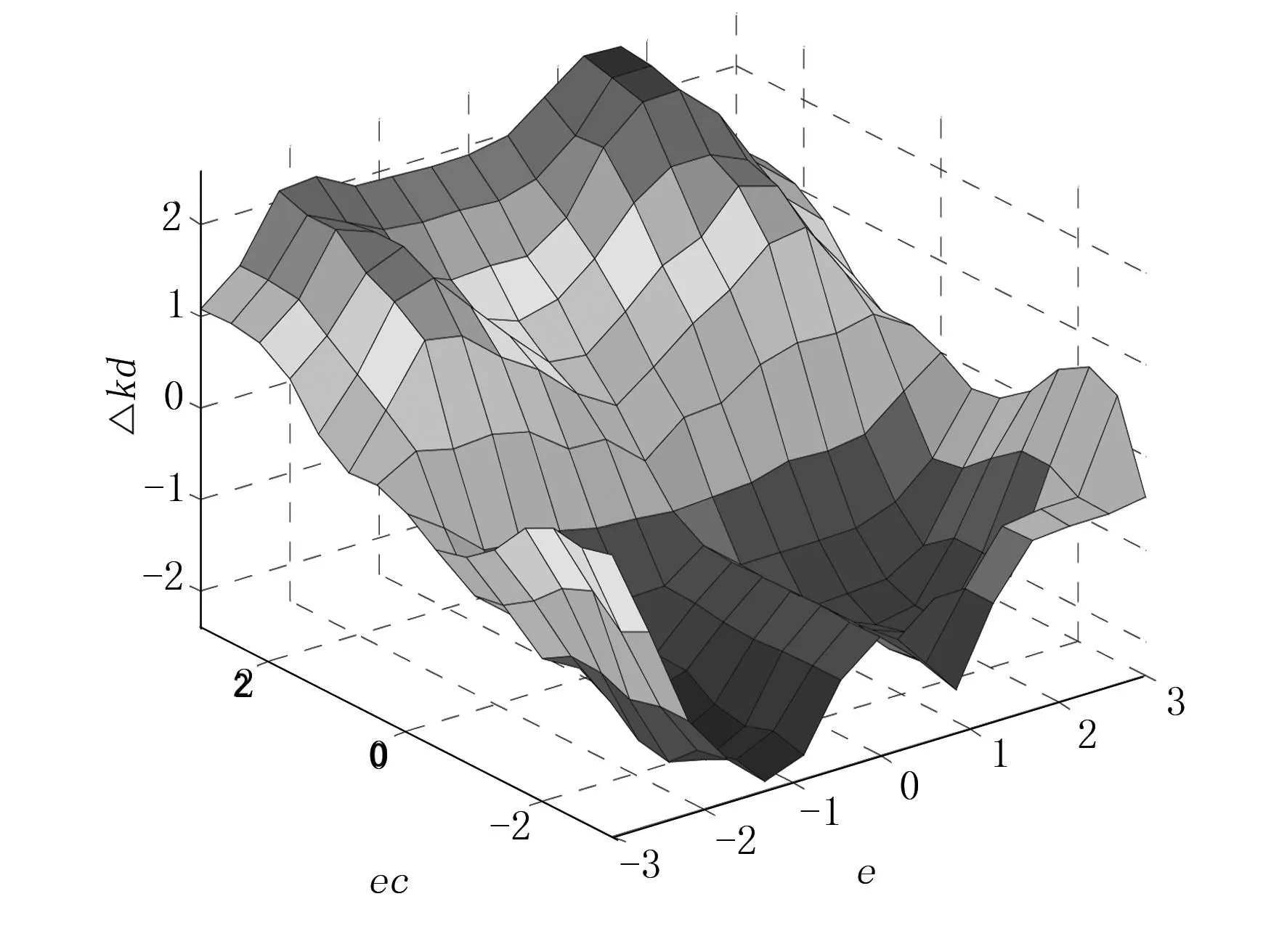
图5 Δki的表面查看图

图6 Δkd的表面查看图
3系统的建模与仿真
仿真时,简化车辆模型,将拖拉机的执行机构看作为一阶惯性环节,假设拖拉机处于理想状态下(前路无阻力)。根据实际经验,设计转向的传递函数可表示为:0.083/0.5s+1,根据步进电机与转速的对应关系n=P/4 000(n为转速,r/min,P为步进电机频率,个/min),实际前轮转角角速度与转向轮偏角存在积分关系。初始PID控制器的3个参数设置为kp=0.8kd=1.0ki=0.5,模糊PID仿真框图如图7所示。

图7 模糊PID自调整的仿真模型
由仿真响应曲线图8可以看出:与常规PID控制相比,模糊PID控制使系统超调量减小,反应时间加快,更快地达到平稳状态等特点,具有更佳的控制效果。
4台架实验
为了进一步验证参数自整定模糊PID控制算法的可用性,设计了台架实验。实验平台为改装的铁牛—654拖拉机。其改造部分为:并联一套全液压转向控制器,利用步进电机驱动,实现拖拉机前轮自动转向控制。实验时将拖拉机前轮支起,使转向前轮处于理想状态(无阻力),对其进行指定转角实验,实验结果如表4所示(其中左转为负,右转为正)。
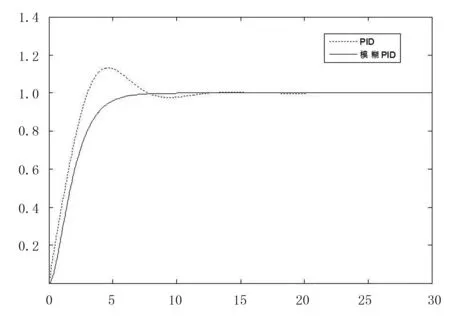
图8 仿真响应曲线

目标转角/(°)实际转角/(°)响应时间/s-20.0-19.52.5-10.0-10.510.00.501010.012020.52.5
分析转向结果,绘制转向实验结果图,如图9所示。
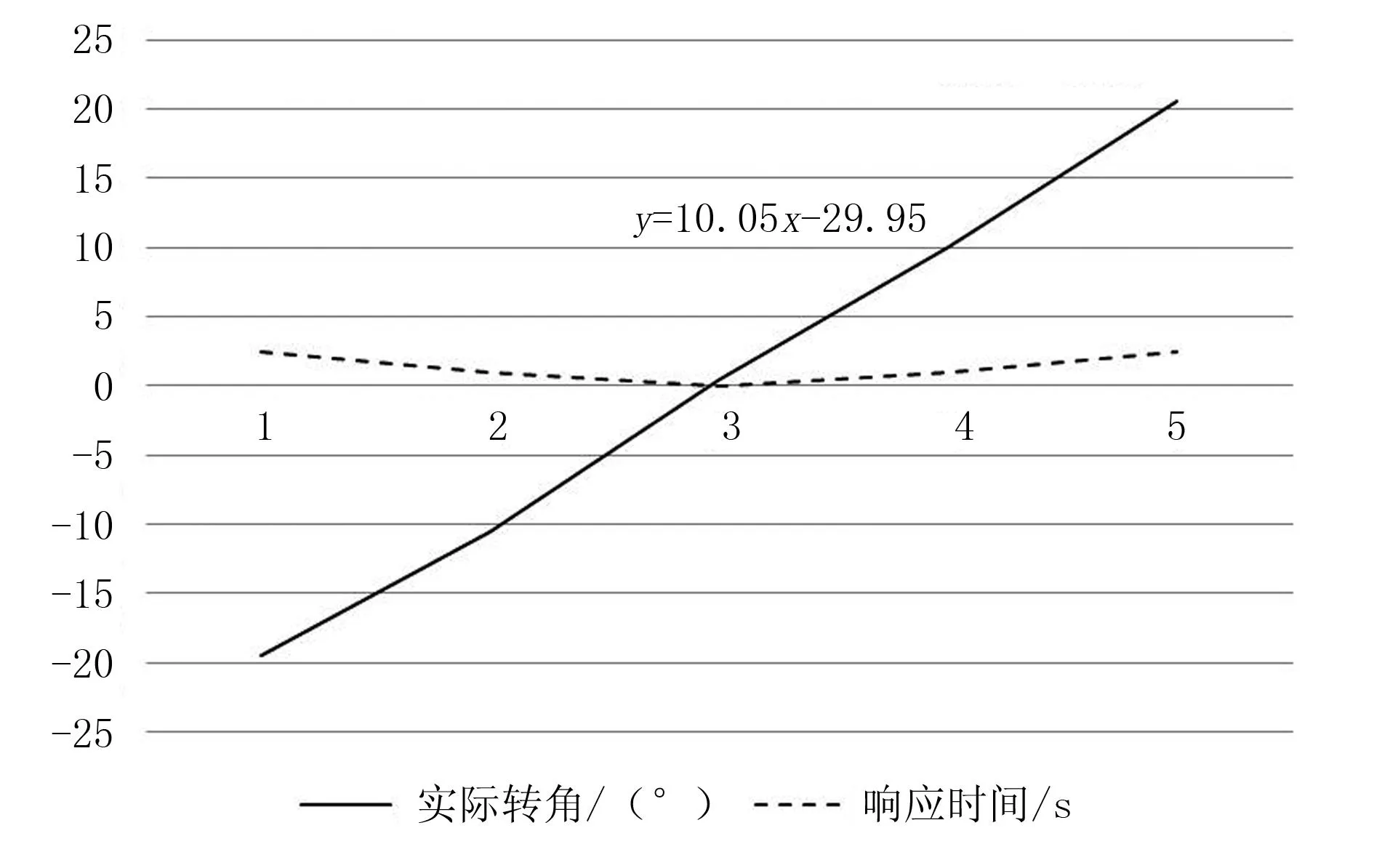
图9转向实验结果分析
由图9可以看出:模糊PID控制算法能够很好的控制拖拉机前轮的自动转向,转角与转向时间满足一阶线性关系,能够实现小角度慢转, 实现微调; 大角度快转,实现快速转动到期望转角,能够满足自动控制系统的需求。
5结束语
1)对拖拉机自动驾驶转向控制算法设计了模糊PID控制,通过建模仿真可以看出:该控制算法与常规算法在控制效果上有了较大的改善,使系统的超调量较小,反应速度加快,调节时间缩短,能够很好地满足拖拉机自动驾驶转向控制算法的需求。
2)台架实验表明:该控制方法误差在自动转向控制允许的范围内,能够根据角度的大小自动调整转向速度的快慢,可以很好地控制拖拉机自动转向,能够满足自动驾驶的需求。
参考文献:
[1]贾全.拖拉机自动导航系统关键技术研究[D].北京:中国农业机械化科学研究院,2013.
[2]罗锡文,张智刚,赵祚喜,等.东方红X-804 拖拉机的DGPS 自动导航控制系统[J].农业工程学报,2009(25):139-145.
[3]连世江,陈军,贾海政,等.基于PID控制的拖拉机自动转向系统[J].农机化研究,2009,31(6):211-213.
[4]陈文良.拖拉机自动驾驶转向控制系统的研制[D] .北京:中国农业大学,2006.
[5]高冰.基于模糊PID软切换的列车自动驾驶系统控制算法及仿真研究[D].北京:北京交通大学,2009.
[6]纪友芳,林美娜.模糊PID复合智能控制参数自整定研究[J].微计算机应用,2007(8):828-832.
[7]李楠,孟庆春,付晓峰.基于参数自整定模糊PID控制策略的电机模型仿真研究[J].机电工程技术,2004(9):55-57,95.
[8]李以农,郑玲,郝奕,等.基于参数自整定模糊PID的汽车纵向控制[J].江苏大学学报:自然科学版,2006(1):22-26.
[9]仇成群,刘成林,沈法华,等.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012(6):197-202.
[10]John F Reid,Qin Zhang,Noboru Noguchib,et al.Agricultural automatic guidance research in North America[J].Computers and Electronics in Agriculture,2000,25:155-167.
Abstract ID:1003-188X(2016)11-0162-EA
Automatic Steering Control System Research on Fuzzy PID
Zhang Changlong1,Li Wenchun2,Ma Rong1, Ren Ling1, Shi Xiang1
(1.College of Mechanical and Electrical Engineering,Shihezi University, Shihezi 832003,China; 2.Xinjiang Wanda Alar Agricultural Machinery Co. Ltd,Alar 843300,China)
Abstract:Tractor automatic steering control system, to improve the automatic steering performance,meet the job requirements, design the parameter self-tuning fuzzy PID control. Design and implementation of fuzzy control rules and modify the PID three output scaling factor in real time,improve the control performance of the system.And the fuzzy PID has carried on the modeling and simulation in MATLAB,the simulation results can be seen that this control method has good steady precision and adaptive ability, obviously improve the dynamic characteristic of the system, beneficial to the improvement of the tractor automated driving accuracy.
Key words:automatic steering; parameter self-tuning; fuzzy PID; tractor
中图分类号:S219.032.3
文献标识码:A
文章编号:1003-188X(2016)11-0162-04
作者简介:张长龙(1989-),男,山东滕州人,硕士研究生,(E-mail)603515099@qq.com。通讯作者:马蓉(1974-),女,甘肃平凉人,教授,硕士生导师,(E-mail)lzymrhs@163.com。
基金项目:国家高技术研究发展计划项目(2013AA102307);新疆生产建设兵团南疆专项(2013BA048)
收稿日期:2015-10-09
猜你喜欢
一重技术(2021年5期)2022-01-18
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
青少年科技博览(中学版)(2021年9期)2021-12-21
好孩子画报(2020年3期)2020-05-14
阅读(快乐英语中年级)(2020年12期)2020-04-06
创新作文(1-2年级)(2019年2期)2019-08-06
创新作文(小学版)(2019年4期)2019-07-24
小学生必读(低年级版)(2019年3期)2019-07-08
儿童故事画报(2018年4期)2018-05-21
儿童时代·幸福宝宝(2017年7期)2017-10-13