基于UG和ADAMS的采摘机器人动力学仿真分析
2016-03-23 03:33李卓然
农机化研究 2016年11期
李卓然
(罗定职业技术学院 电子信息系,广东 罗定 527200)
基于UG和ADAMS的采摘机器人动力学仿真分析
李卓然
(罗定职业技术学院 电子信息系,广东 罗定527200)
摘要:为了提高采摘机器人机械手设计的速度,缩短开发周期和时间,并提高设计的准确性,采用UG和ADAMS软件联合仿真的方法,对采摘机器人进行了设计优化。首先利用UG软件对六自由度的采摘机械手进行了三维实体建模,然后采用UG和ADAMS的兼容性接口将模型导入到了ADAMS软件中,根据实际设计需求添加了约束,最后对机械手进行了动力学仿真。通过仿真计算,得到了机械手各关节的位移-时间曲线和力学分析曲线,通过观察结构的运动轨迹和受力情况,可以对初始设计阶段的机械手进行优化设计,从而提高了设计的效率。
关键词:采摘机械手;联合仿真;运动分析;ADAMS;UG
0引言
在现代机械结构设计过程中,机械产品不再局限于简单的静态平面设计,而三位实体的设计和动力学分析越来越受到设计和开发人员的重视。虚拟样机是设计人员在开发新产品时,在概念设计阶段,为了降低设计成本、减少开发时间,对产品进行的虚拟性测试。对于采摘机器人来说,其关键部分设计是采摘机械手的设计,对机械手进行虚拟仿真,可以得到机械手的运动轨迹,分析机械手的性能,提高了采摘机器人开发的效率和可靠性。由于机械手是一种耦合性强的非线性时变系统,在单一软件中难以进行仿真模拟。为此,在对机械手进行分析时,首先建立了机械手的三维模型,然后将三维模型导入到ADAMS中进行运动学仿真,实现了采摘机器人复杂机械手的仿真。
1机器人UG建模和ADAMS模型导入
采摘机器人的主要部件是机械手,机械手不同的零部件之间存在不同的约束,在设计之前,需要根据零部件的位置和尺寸确定主要的设计参数、设计约束和设计基准。根据模型的图纸,在UG软件中建立模型的草图,然后对草图进行拉伸、旋转和扫描等一系列操作建立采摘机器人机械手的各个零部件,最后对零部件进行装配。建立完成的UG模型如图1所示。

图1 采摘机器人机械手UG转配模型
该模型共由7部分组成,将转配好的模型可以导入到ADAMS进行动力学分析。ADAMS是专业的虚拟仿真软件,对机械运动的静力学、动力学和运动学都有强大的分析功能,但在ADAMS中只能建立比较简单的模型;要想实现采摘机器人的运动学仿真,需将UG模型导入到ADAMS软件中。本文使用ADAMS提供的UG数据结构,将模型导入到ADAMS/View模块中,导入后的效果如图2所示。
图2表示导入ADAMS软件中的机器人仿真模型,其主要过程:首先,将机器人模型在UG软件中进行保存,保存格式为.txt文件格式;然后,启动ADAMS软件新建一个模型;进入工作窗口,在File功能中选择Import将建立好的模型导入即可;导入模型后便可以在ADAMS中进行运动仿真参数的设置。

图2 导入ADAMS的UG机器人仿真模型
2ADAMS运动仿真模型和参数设置
在ADAMS/ View操作环境下,如果要让机器人按照某一规律进行运动,则只需要在机器人上施加一点的驱动,然后利用ADAMS提供的对象测量功能,对整个模型进行分析。本次研究让平台从点 (0,6,8)开始运动,运动方式为空间圆锥曲线运动。
运动方程为

(1)
其中,z0表示机器人的初始高度,取值为260mm;S取值为6mm;T取值为2mm。给机器人添加一个质心运动,其运动的轨迹方程为
TraX=3·time·cos(3.14×time)
TraY=3·time·sin(3.14×time)
TraZ=3·time
将仿真时间设置为t=20s,步长为600步,利用ADAMS/View模块提供的对象测量功能对机器人的每个关节的位移进行测量,然后可以输出位移-时间曲线;利用曲线处理工具对曲线进行一阶和二阶求导,便可以得到机器人机械手的速度和减速度曲线。
将模型的各个零件导入到ADAMS之后,零件之间还没有添加约束,构件之间在ADAMS中是独立存在的,因此需要给机器人装配体添加运动约束, ADAMS/View共提供了3种类型的约束,包括基本约束、运动约束和运动副约束。
图3为机器人添加约束的示意图。其中,机械臂和执行末端的各个关节之间都是转动关节,因此可以定义为旋转副,底座定义为固定副,对每个关节添加驱动,便可以进行运动学仿真。
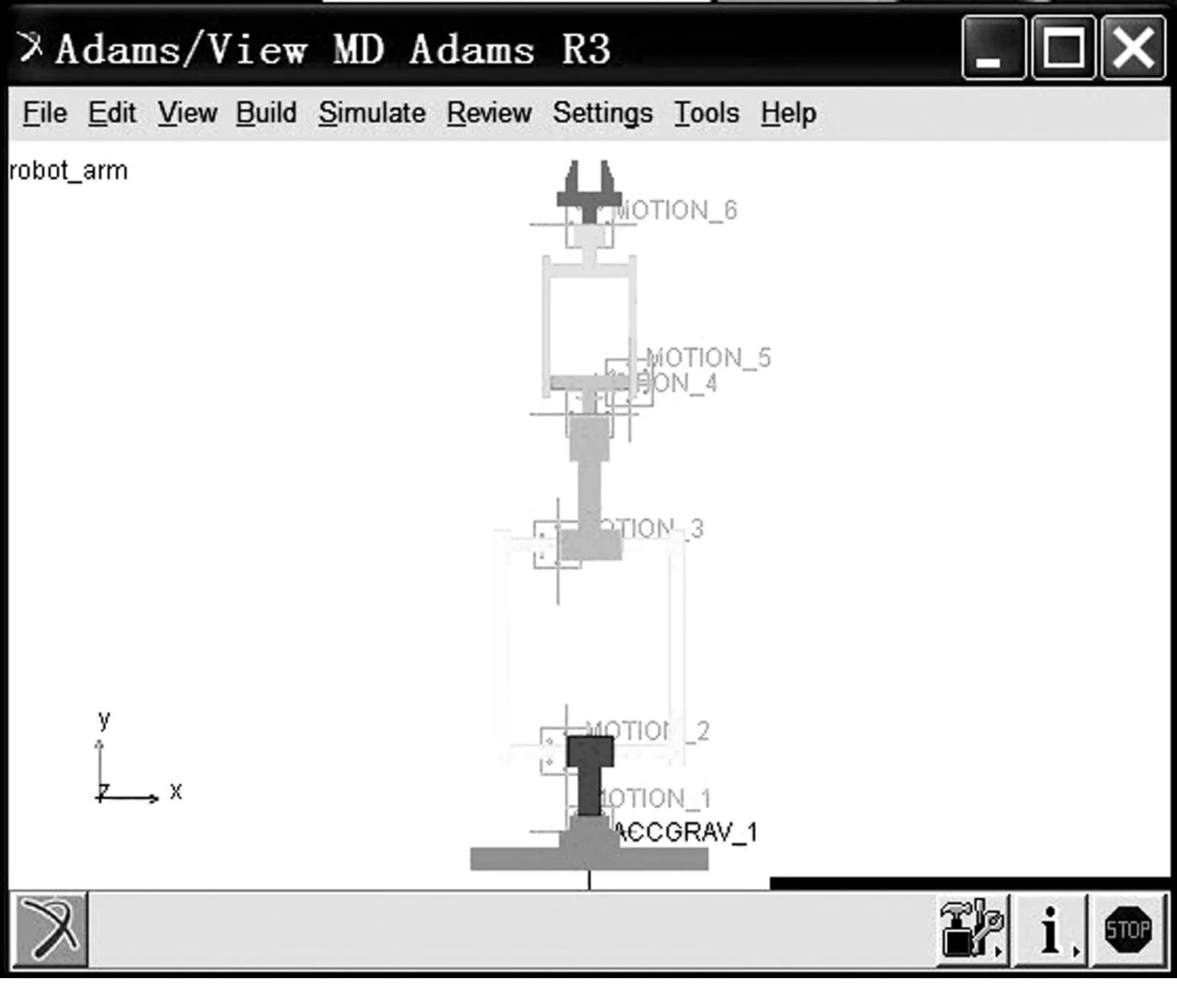
图3 机器人添加约束示意图
3机器人动力学分析
对于采摘机器人机械手的研究,运动学分析是研究的重点,包括姿态、位置和力学分析。利用ADAMS可以输出机械手各个关节的时间-位移曲线,取主要的3个关节曲线进行输出,如图4所示。

图4 各个关节位移-时间曲线
由图4可以看出:随着圆锥曲线运动半径的增大,机械手的位移变化比较显著,因此可以根据轨迹的变化对机械结构进行尺寸优化,使其速度和加速度变化缓慢,从而可以在无需重新建模的基础上,简化了运动学分析过程。为了进一步研究机构的运动性能,需要对机器人的关节进行力学分析。
在ADAMS中进行力学分析,可以采用New2ton-Euler方法建立动力学模型,并对模型进行求解,而在实际应用中,需要采用你逆动力进行仿真。在对机器人进行运动学反解时,需要在质心点添加一个力,该力的大小为800N,通过计算得到的分析曲线如图5所示。
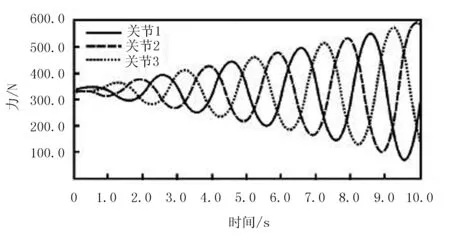
图5 采摘机器人机械手Z方向上的受力
图5表示通过仿真模拟计算,在Z方向上得到的采摘机器人的受力曲线。由图5可以看出:机械手在在圆锥运动时,3个关节的受力大致相同,变化不大,因此符合设计的要求。
4结论
应用高级建模软件UG和虚拟仿真软件ADAMS,将采摘机器人的建模和运动与动力学分析结合了起来,实现了采摘机器人的运动动力学分析和结构优化设计。软件建模和虚拟仿真的使用,大大简化了机械产品的设计开发流程,提高了工作效率,可以使设计人员把更多的精力投入到结构优化中,对于机械设计和制造的创新具有一定的实用价值。
参考文献:
[1]刘丽凤. 基于UG和ADAMS的六自由度机械手三维实体动画仿真[J].机电技术,2010(1):1-3.
[2]田凤霞,司景萍,万方军,等.基于UG、ANSYS和ADAMS的联合仿真研究[J].公路与汽运,2010 (1):1-4.
[3]游世明,陈思忠,梁贺明.基于ADAMS的并联机器人运动学和动力学仿真[J].计算机仿真,2005,22(8): 181-185.
[4]王海军,王君英.四自由度混联机床的加工过程仿真研究[J].机电工程技术,2006,35(2):13-15.
[5]于淼,赵继,苗忠.基于多柔体动力学的混联研抛机床仿真分析[J].机床与液压,2005,(12):27-28.
[6]赵新华,李彬,田亮.一种并联机器人的运动学与动力学仿真[J].机电产品开发与创新,2006,19(4):27-28.
[7]陈军,王虎,蒋浩然,等.猕猴桃采摘机器人末端执行器设计[J].农业机械学报, 2012,43(10):151-154.
[8]陈燕,蔡伟亮,邹湘军,等.荔枝的力学特性测试及其有限元分析[J].农业工程学报,2012,27(12):358- 363.
[9]陈燕,蔡伟亮,向和平,等.面向机器人采摘的荔枝果梗力学特性[J].农业工程学报,2011,28(21): 53-58.
[10]顾宝兴,姬长英,王海青,等.智能移动水果采摘机器人设计与试验[J].农业机械学报,2012,43(6): 153-160.
[11]李秦川,胡挺,武传宇,等.番茄采摘机器人末端执行器研究综述[J].农业机械学报, 2008,39(3): 175-179.
[12]刘继展,李萍萍,李智国.番茄采摘机器人末端执行器的硬件设计[J].农业机械学报,2008,39(3):109-112.
[13]刘继展,李萍萍,倪齐,等.番茄采摘机器人真空吸盘装置设计与试验[J].农业机械学报,2010,41(10): 171-172.
Dynamic Simulation Analysis of Picking Robot Based on UG and ADAMS
Li Zhuoran
(Department of Electronic Information,Luoding Polytechnic, Luoding 527200,China)
Abstract:In order to improve the speed of the robot manipulator design, shorten the development cycle and time, and improve the accuracy of the design, by using UG and ADAMS software joint simulation method, the picking robot is designed and optimized. Firstly, the 3D solid model of the robot manipulator with six degrees of freedom is modeled by UG software, and then the model is imported into ADAMS by using UG and ADAMS. The model is added to the actual design requirements. Finally, the dynamic simulation of the manipulator is carried out. Through simulation calculation, the displacement time curves and mechanical analysis curves of the joints of the manipulator are obtained by observing the movement track and force of the structure.
Key words:picking manipulator; combined simulation; motion analysis; ADAMS; UG
中图分类号:S24
文献标识码:A
文章编号:1003-188X(2016)11-0239-03
作者简介:李卓然(1989-),男,哈尔滨人,助教,硕士,(E-mail)714465653@qq.com。
基金项目:国家大学生创新工程项目(2015-2017)
收稿日期:2015-10-26