
平动型油菜开沟器刀刃形状对降阻的影响—基于LS-dyna
2016-03-23 04:36周训谦龚明胜
农机化研究 2016年4期
周训谦,张 建,王 颖,龚明胜,肖 洁
(1.毕节市农业机械研究所,贵州 毕节 551700;2. 毕节市工业学校,贵州 毕节 551700;3.长风科技有限责任公司,兰州 730000)
平动型油菜开沟器刀刃形状对降阻的影响
—基于LS-dyna
周训谦1,张建2,王颖3,龚明胜2,肖洁1
(1.毕节市农业机械研究所,贵州 毕节551700;2. 毕节市工业学校,贵州 毕节551700;3.长风科技有限责任公司,兰州730000)
摘要:开沟器是油菜播种机的核心部件,影响着播种机的工作性能和油菜出芽率。为了改善开沟器的入土性能和减小开沟器工作阻力,本文运用LS-dyna软件对小型手扶式油菜播种机的开沟器切削土壤进行了仿真,并对比分析了6种不同刀刃形状开沟器的工作阻力。结果表明:在其它参数和约束条件相同的条件下,开沟器以0.85m/s前进时,锐角式开沟器的工作阻力小于钝角式开沟器;刀刃为曲线的锐角式开沟器的工作阻力小于刀刃为直线的锐角式开沟器;刀刃为凹曲线的锐角式开沟器的工作阻力小于刀刃为凸曲线的锐角式开沟器;刀刃为曲—曲组合式的开沟器在运行平稳后的工作阻力比刀刃为单一式的开沟器运行平稳后的工作阻力小。
关键词:油菜;开沟器;LS-dyna;刀刃;土壤;降阻
0引言
油菜播种机工作时,开沟器的主要作用是开出种沟的同时引导油菜籽粒和肥料进入沟内,并使湿土覆盖油菜籽粒和肥料。好的开沟器工作时应节能减阻,因此必须考虑土壤与开沟器接触作用及土壤相互之间的群体作用。为了降低改善开沟器工作过程中工作阻力,本文选用平动型开沟器为研究对象,采用LS—dyna软件对油菜播种机的开沟器工作过程进行三维仿真,通过理论计算验证了该模拟方法是可行、合理的[1-3]。
1仿真模型
1.1土壤模型
本文仿真过程中土壤模型尺寸为130mm×80mm×80mm,材料采用LS—dyna中的MAT147。该模型采用修正的Mohr-Coulomb屈服准则[4-6],则有

(1)
其中,F为模型屈服表面力(N);J2为应力偏张量的第2不变量;p为压力(N);K(θ)为应力罗德角函数;φ为内摩擦角(°);c为黏聚力(N);α为定义修正后屈服面和标准Mohr-Coulomb屈服面之间贴近程度的参数[4-6]。
结合贵州毕节地区的土壤特性(黄棕壤)[7],土壤模型的主要参数取值如表1所示,其余参数值参照MAT_FHWA_SOIL中的默认值,单位采用g-mm-ms-MPa单位制。
当α=0时,式(1)恢复为标准Mohr-Coulomb准则。
考虑到贵州毕节耕作的土壤主要为黄棕壤[7],土壤材料的主要参数如表1所示,土壤材料的其余参数参考MAT_FHWA_SOIL中的默认值,本文单位制采用g-mm-ms-MPa。

表1 土壤材料的主要参数
1.2开沟器模型
Ls-dynas和Solidwork的系统坐标系均为笛卡尔坐标系,因此在Solidwork软件中建立的仿真模型导入Ls-dynas软件时,视图坐标方向不发生变化。为了减少计算时间和提高计算精度,在Solidworks软件中建立的油菜播种机开沟器实体简化模型(按1:1建模)如图1所示。为了后文描述方便,图1中定义:(a)为结构1,(b)为结构2,(c)为结构3,(d)为结构(4),e为结构(5),(f)为结构6。

图1 仿真模型图
1.3仿真模型设定
1)开沟器和土壤使用SOLID164单元,用lagrangian算法求解,通过细化网格和添加约束来适当减少沙漏变形。
2)开沟器的材料定义为刚性体模型MAT_RIGID,密度为7.82×10-3g/mm3, 泊松比为0.288,弹性模量为2.11×105MPa,并添加沿Y和Z方向的位移的自由度为0,所有旋转的自由度为0。在仿真过程中,为了防止土壤被挤走,在土壤模型表面添加边界约束,土壤底部添加全约束,右侧添加UX=0。
3)由于模拟过程中开沟器要穿透土壤,因此定义开沟器和土壤的接触类型为Surface to Surface中的Eroding(ESTS),Contact 部件为开沟器,Target部件为土壤。
4)开沟器模型采用自由扫掠网格法划分网格,土壤模型采用映射网格法划分为六面体网格。
1.4仿真条件设计
1)开沟器沿X正方向的速度为0.84mm/ms。
2)根据油菜条播深度25~40mm[1],本文取30mm,即开沟器对土壤的最大切削深度为30mm。
3)刀刃角相同。
4)切削沟宽相同。
5)重力加速度方向相同。
1.5MAT_147材料K文件修改
由于在ANSYS/LS-dyna软件中无材料MAT_147,因此要对ANSYS/LS-dyna中生成的K文件修改后传递给LS-dyna971进行求解。修改MAT_147材料的主要参数为:土壤密度、体积模量、剪切模量、内摩擦角、黏聚力和含水率,其余参数参照MAT_FHWA_SOIL中的默认值。
2仿真与结果分析
该仿真过程时间设为65ms,定义:12ms时为第1工作状态,22mm时为第2工作状态,63ms时为第3工作状态。开沟器工作时,将部分土壤升起、抛翻、推挤或挤压,形成沟痕。结构1和结构2(左图为结构1,右图为结构2)3个工作状态时的阻力云图如图2~图4所示。

图2 12ms时的切削阻力图

图3 22ms时的切削阻力图
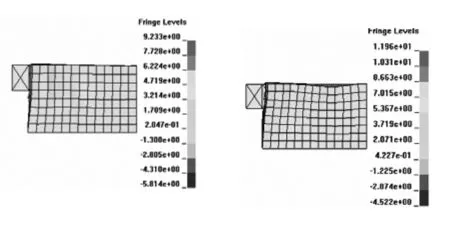
图4 63ms时的切削阻力图
从图2~图4中可以看出:在同一时刻,结构1的工作阻力小于结构2工作阻力。其原因是:结构1对先接触的土壤有松土作用,结构2对先接触的土壤有压实作用;结构1 工作时与开沟器接触的部分土壤有上升趋势,结构2工作时与开沟器接触的部分土壤有下行趋势,因而前者的工作阻力要小于后者的工作阻力;但随着开沟器的前进,它们的工作阻力趋于平稳,结构1的最大工作阻力为12.7N, 结构2的最大工作阻力为12.9N。
图5~图7为结构3和结构4(左图为结构3,右图为结构4)3个工作状态的阻力云图。

图5 12ms时的切削阻力图

图6 22ms时的切削阻力图

图7 63ms时的切削阻力图
从图5~图7中可以看出:在同一时刻,结构3工作时的阻力比结构4工作时的阻力小。这是由于刀刃为下凸的锐角式开沟器在运行时候与土壤接触的面积要小,结构3式开沟器的最大工作阻力为7.4N, 结构2式开沟器的最大工作阻力为10N。
图8~图10为结构5和结构6(左图为结构5,右图为结构6)3个工作状态的阻力云图。
从图8~图10中可以看出:在同一时刻,在第1工作状态时,结构5工作时的阻力比结构4工作时的阻力小,这是由于结构5在运行时候与土壤接触的面积要小,但在第2和第3工作状态时,结构5工作时的阻力比结构4工作时的阻力大;结构5的最大工作阻力为12.8N, 结构6的最大工作阻力为11.3N。

图8 12ms时的切削阻力图

图9 22ms时的切削阻力图

图10 63ms时的切削阻力图
对图2~图10进行纵向对比可以看出:它们的工作阻力都经历着由小增大、再由大减小、最后到平稳的过程。
3理论分析
油菜播种机开沟器正常工作时的工作阻力应小于拖拉机的额定牵引力,按照犁铧式计算土壤阻力[1],则有
(2)
其中,PT为常用耕速下拖拉机的额定牵引力,N;K为土壤比阻,取K=60kPa;n为配套犁体数,取n=1;α为按农业技术要求确定的油菜播深,条播深度25~40mm,本文取α=30mm;b为单犁体耕宽,本文取平均宽度b=7mm;η1为牵引力利用系数,一般为0.8~0.95,取η1=0.9。由式(2)计算出单个开沟器的土壤切削阻力为14.1N。
由此可见,通过有限元模拟得到的结果与公式计算的切削阻力值基本吻合。因此,该模拟切削模型可用于估算油菜播种机工作时的切削阻力,同时验证该模拟方法是合理可行的。
4结论
1)锐角式开沟器的工作阻力小于钝角式开沟器的工作阻力。
2)刀刃为曲线的开沟器的工作阻力小于刀刃为直线的开沟器的阻力。
3)刀刃为凹曲线的锐角式开沟器的工作阻力小于刀刃为凸曲线的锐角式开沟器的工作阻力。
4)刀刃为曲—曲组合式的开沟器在运行平稳后的工作阻力比刀刃为单一式的开沟器运行平稳后的工作阻力小。
5)模拟过程中选取的土壤参数和施加的边界条件是影响结果精度的主要因素,而如何更合理选取土壤参数和施加边界条件,使模拟结果与实际结果更好地吻合,还需要深入研究。
参考文献:
[1]中国农业机械化科学研究院.农业机械化设计手册(上册) [K].北京:中国农业科学技术出版社, 2007:300-368.
[2]于建群,钱力彬,于文静,等.开沟器工作阻力的离散元法仿真分析[J].农业机械学报,2009,40(6):53-57.
[3]周明,张国忠,姚兴林. 有限元法在土壤切削过程模拟中的应用[J].农机化研究,2009,31(9):190-193.
[4]杨望,蔡敢为,杨坚.土壤直剪试验的动力学仿真[J].农业机械学报,2011,42(7):96-101.
[5]夏俊芳,何小伟,余水生,等.基于ANSYS/LS-DYNA的螺旋刀辊切削有限元模拟[J]. 农业工程学报,2009,40(6):53-57.
[6]薛子萱,吕新民,唐卫卫.螺旋刀具土壤切削过程模拟分析 [J].农机化研究,2011,33(4):13-16.
[7]涂成龙,张玉彪,刘丛强,等.典型岩溶区域主要土壤类型分布特征与表层土壤保有量估算 [J].生态学杂志,2012,31(3):620-625.
The Resistance-reducing Influence of Cutting Edge Shape of Translational Coleseed Colter—Based on LS-dyna
Zhou Xunqian1, Zhang Jian2, Wang Ying3, Gong Mingsheng2, Xiao Jie1
(1.Bijie Agriculture Machinery Research Institue,Bijie 551700,China; 2.Bijie Polytechnic School,Bijie 551700,China; 3.Science and Technology Limited Liability Company of Changfeng,Lanzhou 730000, China)
Abstract:Colter is the core component of coleseed seeder, it affects the working performance of seeder and coleseed seeder sprouting, in order to improve the soil piercing performance and reduce the working resistance of the colter. the colter cut soil about small working coleseed seeder using the LS-dyna software in this paper, comparison and analysis working resistance of six different cutting edge shape colter. With the other parameters are same, the results show that under the colter with 0.84 m/s, the work resistance of the acute angle colter is smaller than the work resistance of the obtuse angle coler, the work resistance of the acute angle colter of the curve cutting edge shape is smaller than the work resistance of the obtuse angle coler of the straight line cutting edge shape, the work resistance of the acute angle colter of the lower concave curve cutting edge shape is smaller than the work resistance of the obtuse angle coler of the upper convex curve cutting edge shape, the stability operation work resistance of curve-curve combined cutting edge shape is smaller than the stability operation work resistance of single edge shape.
Key words:coleseed; colter; LS-dyna; cutting edge;soil;resistance-reducing
文章编号:1003-188X(2016)04-0053-04
中图分类号:S223.2+5
文献标识码:A
作者简介:周训谦(1965-),男,贵州毕节人,副研究员,(E-mail)zxq6502 @163.com。通讯作者:张建 (1979-),男,甘肃会宁人,高级讲师,硕士,(E-mail)zhangjianwy@yeah.net。
基金项目:农业部农业技术试验示范专项(2014-2015)
收稿日期:2015-03-13
猜你喜欢
椰城(2021年12期)2021-12-10
今日农业(2021年21期)2021-11-26
今日农业(2021年14期)2021-10-14
红领巾·探索(2021年2期)2021-08-26
学生天地(2020年34期)2020-06-09
当代陕西(2019年16期)2019-09-25
当代陕西(2019年11期)2019-06-24
娃娃乐园·综合智能(2018年3期)2018-03-22
数学小灵通(1-2年级)(2017年10期)2017-11-08
作文通讯·高中版(2017年12期)2017-02-06
