BDS/GPS/GLONASS组合单频单历元高精度相对定位性能分析
2016-04-20 02:35张康郝金明蒲湘文张宇杨团生
全球定位系统 2016年1期
张康,郝金明,蒲湘文,张宇,杨团生
(1.解放军信息工程大学,郑州 450001;2.导航工程重点实验室,郑州 450001;
3.北斗导航应用技术协同创新中心,郑州 f450001;4. 东莞市茶山镇测绘队,东莞 523380;
5.广州军区测绘信息中心,广州 510000)
BDS/GPS/GLONASS组合单频单历元高精度相对定位性能分析
张康1,2,3,郝金明1,2,3,蒲湘文4,张宇1,2,3,杨团生5
(1.解放军信息工程大学,郑州 450001;2.导航工程重点实验室,郑州 450001;
3.北斗导航应用技术协同创新中心,郑州 f450001;4. 东莞市茶山镇测绘队,东莞 523380;
5.广州军区测绘信息中心,广州 510000)
摘要:由于GLONASS 与BDS、GPS相比,其相对定位的双差模糊度失去整数特性,本文给出了BDS/GPS/GLONASS组合单频相对定位的统一的函数模型。初步分析了BDS/GPS/GLONASS组合单频载波相位相对定位的定位性能,对整周模糊度采用LAMBDA方法,单历元搜索策略。通过实测短基线数据分析表明:相比于单系统及双系统组合的相对定位,三系统组合单频单历元相对定位能够有效地提高定位精度及模糊度固定率,而且更加适合城市峡谷等复杂环境。
关键词:BDS/GPS/GLONASS组合;单频;相对定位;LAMBDA方法;模糊度固定率
0引言
北斗卫星导航系统(BDS)于2012年底已提供区域卫星导航定位服务,计划于2020年完成全部星座的布设,并提供全球卫星导航定位服务[1]。北斗卫星导航系统是继美国GPS,俄罗斯GLONASS系统之后第三个建成的全球卫星导航系统。相比于单一卫星导航系统,多系统组合将显著增加可视卫星数目、改善卫星空间几何结构,从而提高导航定位的可用性、连续性和精度,尤其适合城市峡谷等环境中。多系统组合导航定位将是必然的发展趋势[2]。
目前,很多文献对两个系统的双频载波相位相对定位算法模型进行了研究,如:GPS/GLONASS、GPS/Galieo、GPS/BDS组合系统。但三系统组合的双频载波相位相对定位研究尚处于起步阶段,如:BDS/GPS/GLONASS、GPS/GLONASS/Galieo;对于三系统组合的单频相对定位的研究则就更少。 Odolinski对基于GPS/BDS组合系统的短基线单频RTK进行了研究,研究结果表明,组合系统单频RTK定位精度优于单系统[3-4]。汪亮等对BDS/GPS/GLONASS组合的双频相对定位性能进行对比分析,分析表明,三系统组合可以明显提高定位精度[5]。
周跳探测及修复对高精度相对定位的定位精度影响非常大,如果错误的修复周跳,将会严重影响其定位精度[6]。对于单频接收机而言,其观测数据很容易发生周跳,且周跳比较多,难以探测及修复,即使修复,修复错误的风险很大。而本文采用单历元模糊度解算,可以有效地避免复杂的周跳探测与修复,还可以降低运算量。
由于GLONASS系统采用FDAM调制信号,不同于BDS和GPS系统(CDAM),所以GLONASS双差函数模型与BDS和GPS双差函数模型[7]不同。本文研究了BDS/GPS/GLONASS组合单频相对定位的函数模型,对整周模糊度采用LAMBDA方法,单历元搜索策略。利用GPS/GLONASS/BDS三系统八频司南接收机在郑州进行短基线实测,通过处理采集的数据,初步分析了BDS/GPS/GLONASS组合单频高精度相对定位的定位性能,其中包括卫星的可见性、PDOP值、模糊度固定率和定位精度等。
1数学模型
1.1时空基准
时间系统和坐标系统是导航定位的参考基准,不同卫星导航系统进行融合使用,首先需要进行时空基准的统一。本文将时空基准统一到GPST和WGS-84坐标系下。BDT与GPST均属于原子时系统,而GLONASST属于UTC系统,它们之间的转化公式为[8-9]
(1)
坐标系统中: BDS为CGCS2000大地坐标系; GPS采用的是WGS-84坐标系; GLONASS最新的坐标系统是PZ90.02.CGCS2000坐标系与WGS-84坐标系之间的差异对于本文的短基线相对定位的影响可以忽略,而PZ90.02坐标系与WGS-84坐标系之间需要进行坐标转换,具体转换公式可以参考文献[8],这里不再赘述。
1.2观测方程
假定u表示接收机号,u=1,…,n,n表示跟踪BDS、GPS和GLONASS卫星的接收机数量。s*表示卫星号,s*=1*,…,m*,m*表示卫星数,假定sr*为参考卫星,*表示系统号(B表示BDS卫星,G表示GPS卫星,R表示GLONASS卫星),f*表示某卫星s*发射的频率(本文只分析卫星发射的单个频点的数据)。则BDS、GPS和GLONASS的观测方程可以统一表示为
(2)

(3)
1.3BDS/GPS/GLONASS单频相对定位函数模型
首先在基准站与移动站之间进行站间做差(1表示基准站,2表示移动站),削弱卫星钟差和大气延迟误差的影响,那么BDS/GPS/GLONASS相位及伪距站间单差模型表示为
(4)

(5)
(6)

(7)
通过上述双差方程结合LAMBDA算法进行BDS/GPS/GLONASS组合系统双差模糊度的固定,待双差模糊度成功固定后再将参考卫星的单差模糊度与基线向量一并求解[10]。
1.4模糊度固定率
整周模糊度解算是否正确直接影响载波相位相对定位的精度。而模糊度固定的性能可以通过模糊度固定率来体现,即模糊度固定率可以表示为[4]
(8)
式中:NCF为固定的历元个数;NT为解算的整个历元总数。因此,模糊度固定失败率为
PfE=1-PSE.
(9)
2算例分析
本文的实验数据采用GPS/GLONASS/BDS三系统兼容接收机,在郑州高新区实测了一组长度为8km静态短基线,数据采样率为1s.通过七种方案:(I)BDS,(II)GPS,(III)GLONASS,(IV)BDS/GPS,(V)BDS/GLONASS,(VI)GPS/GLONASS,(VII)BDS/GPS/GLONASS,对比分析了BDS/GPS/GLONASS组合单频相对定位的定位性能。如图1~图3所示,七种方案都采用高度角定权法。首先分析了不同截止高度角的可见卫星数与PDOP值。其次,分析了在不同截止高度角的BDS/GPS/GLONASS组合单频高精度相对定位的模糊度固定成功率及定位精度。
通过图1~图3可以看出,随着截止高度角的增加,可见卫星数逐渐减少,组合系统的可见卫星数能够满足单频高精度相对定位,而单系统的可见卫星数难以满足截止高度角较高的定位。当截止高度角30°时,通过图2可以看出,方案III(GLONASS)只有45.5%的历元可以实现单频高精度相对定位,截止高度角增加到45°时,通过图3看出方案III已经不可以实现单频高精度相对定位,方案II(GPS)也只有68.2%历元可以实现单频高精度相对定位。同时可以发现,不论是截止高度角的高或低,组合系统的PDOP值优于单系统。但是随着截止高度角增加,由于可见卫星数都会降低,不管是组合系统还是单系统,导致PDOP值也增大。当截止高度角为45°时,PDOP值显著增大,但是六种方案(除方案III)的单频高精度相对定位的定位精度优于截止高度角为15°时。
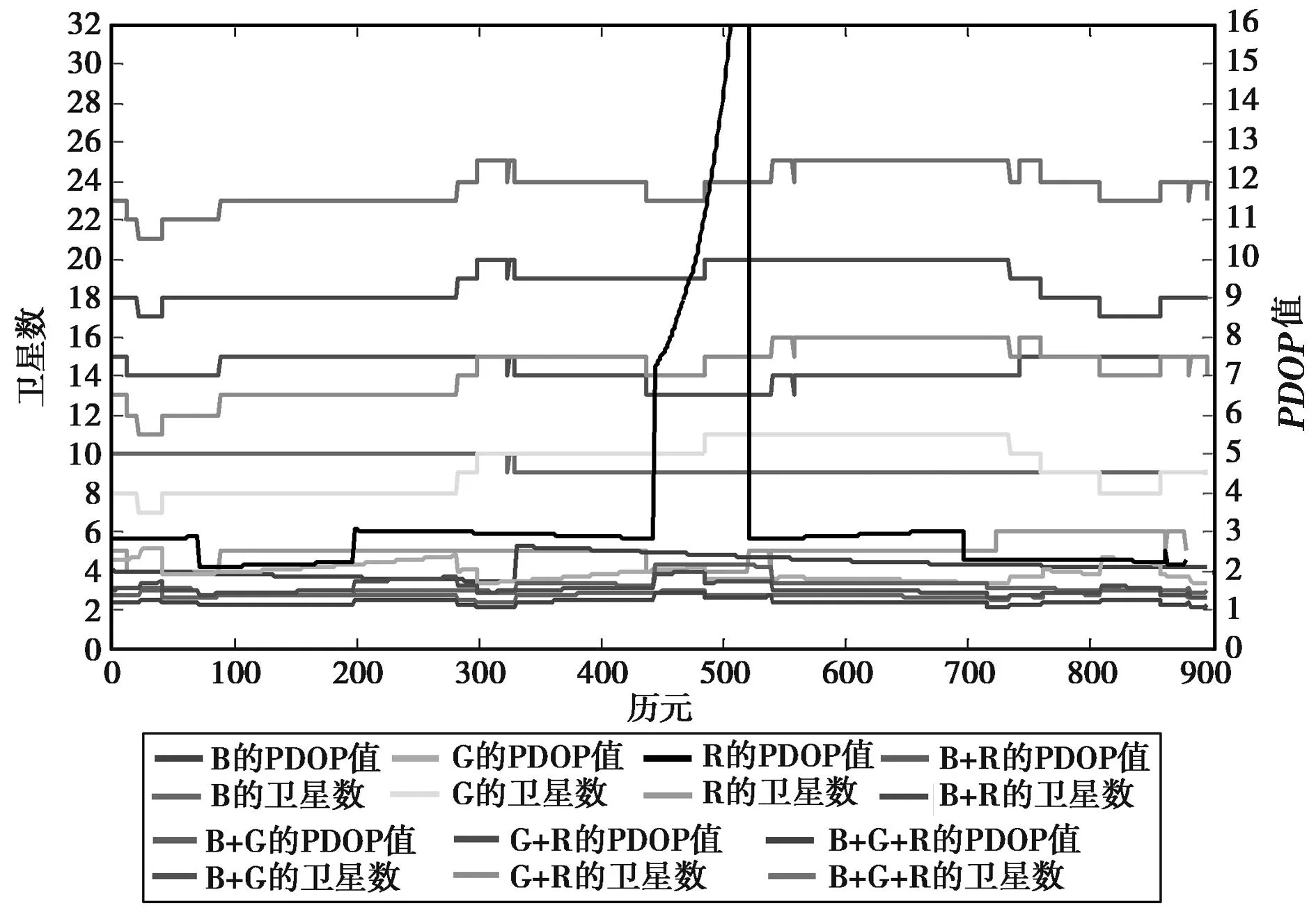
图1 截止高度角15°时,七种方案的可见 卫星数及PDOP值
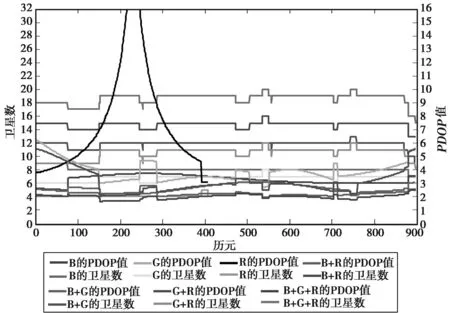
图2 截止高度角30°时,七种方案的可见 卫星数及PDOP值

图3 截止高度角45°时,七种方案的可见 卫星数及PDOP值
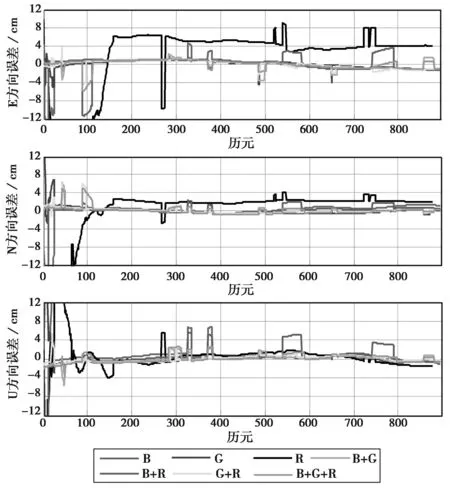
图4 七种方案在E、N、U方向的 定位误差(截止高度角15°)
通过图4可以看出,在截止高度角为15°,七种方案均可以实现定位,定位精度都均在厘米级别。通过表1可以看出,七种方案的模糊度固定率(除方案III)都在90%以上,双系统组合高精度相对定位方案的模糊度固定率优于单一系统,三系统组合高精度相对定位的模糊度固定率优于双系统组合。但是三系统组合高精度相对定位的定位精度与B+G(IV)的定位精度相当,优于其他双系统组合和单系统相对定位。
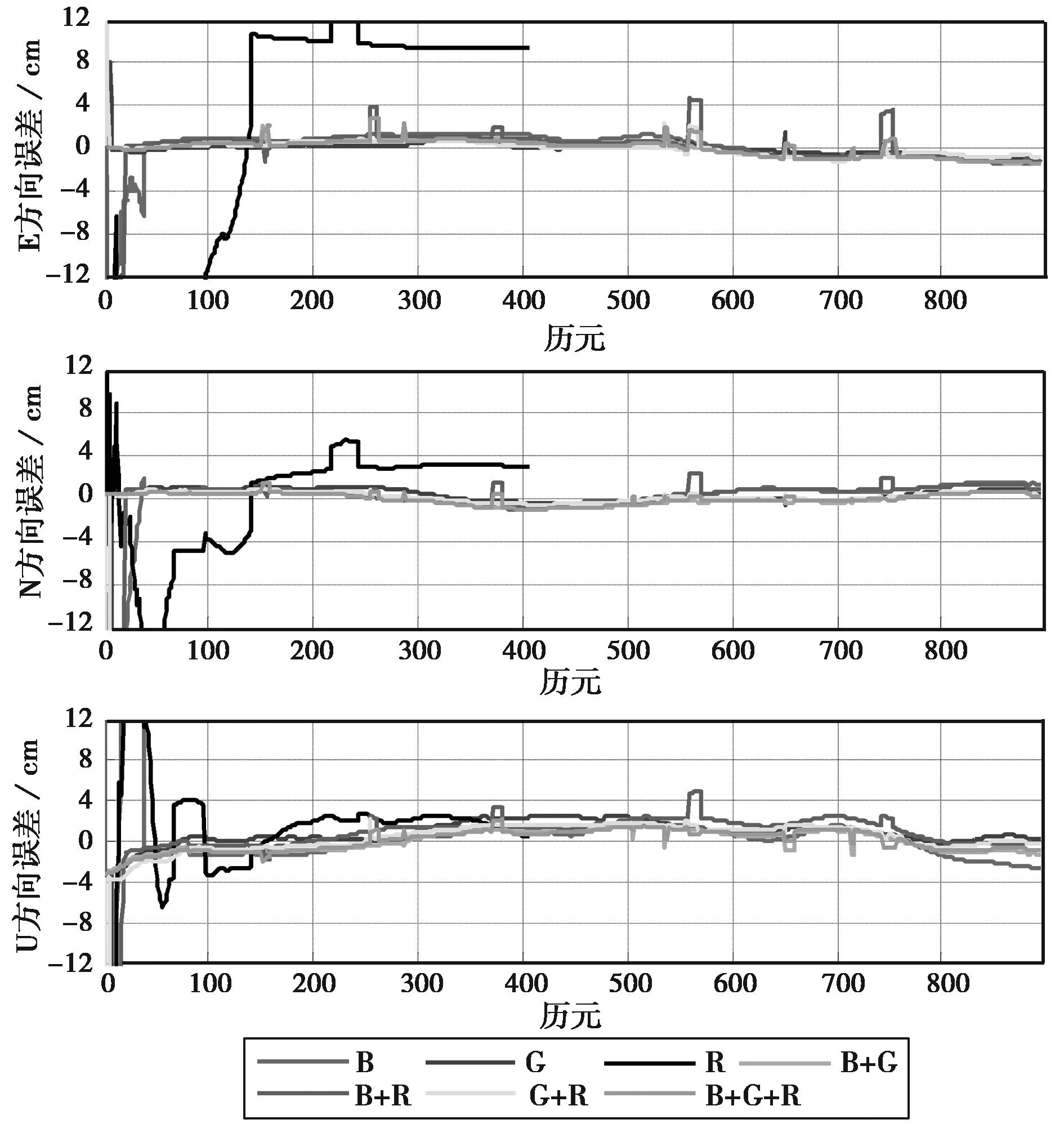
图5 七种方案在E、N、U方向的 定位误差(截止高度角30°)
通过图5看出,在截止高度角为30°,方案III(GLONASS)只有45.4%的历元可以实现高精度相对定位,而其他方案均可以实现(100%)。七种方案的定位精度均在厘米级别。通过表2与表1对比发现,当截止高度角为30°时,不管是单系统单频还是双、三系统组合单频,它们都可以提高模糊度的固定率,但是对短基线的相对定位精度改善不明显。双系统组合单频相对定位的模糊度固定率不是很明显优于单系统单频 (单GPS系统的模糊度固定率优于双系统),但是三系统组合单频相对定位的模糊度固定率明显优于双系统组合单频相对定位及单系统单频相对定位。可以看出,三系统组合对于单频相对定位模糊度固定率有一定的改善。
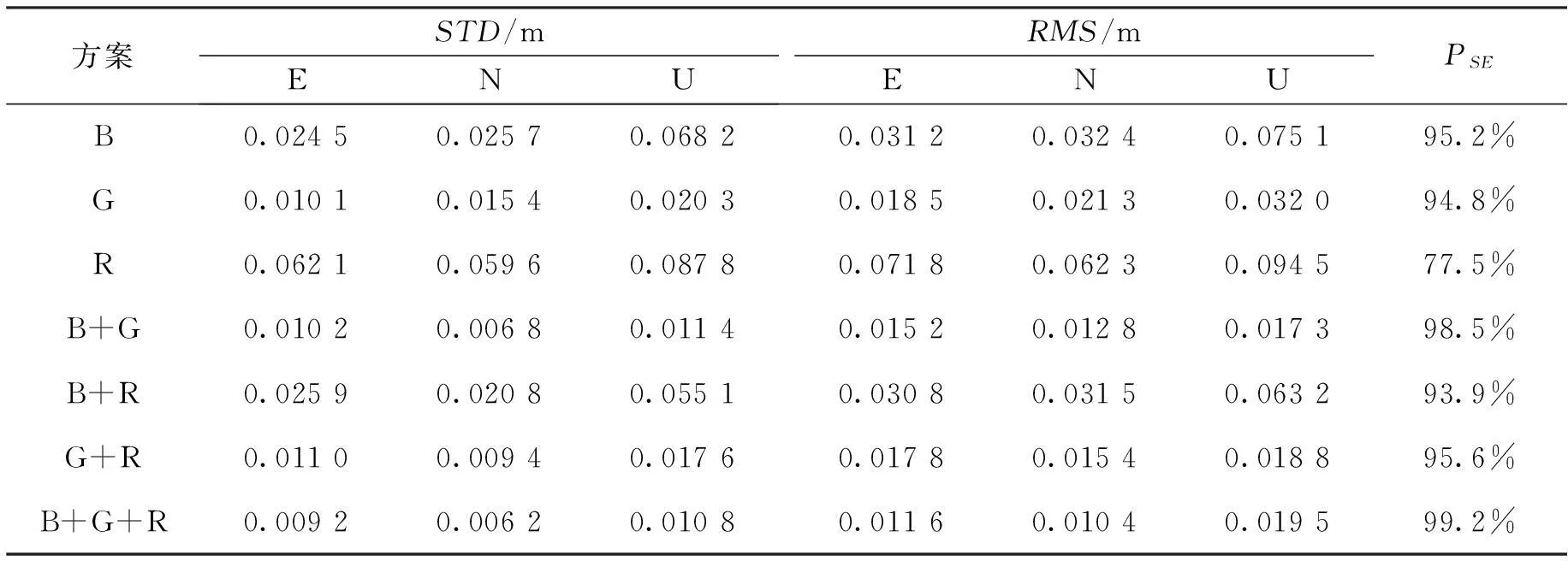
表1 截止高度角15°时七种方案在E、N、U方向的STD、RMS值及模糊度固定率(PSE)
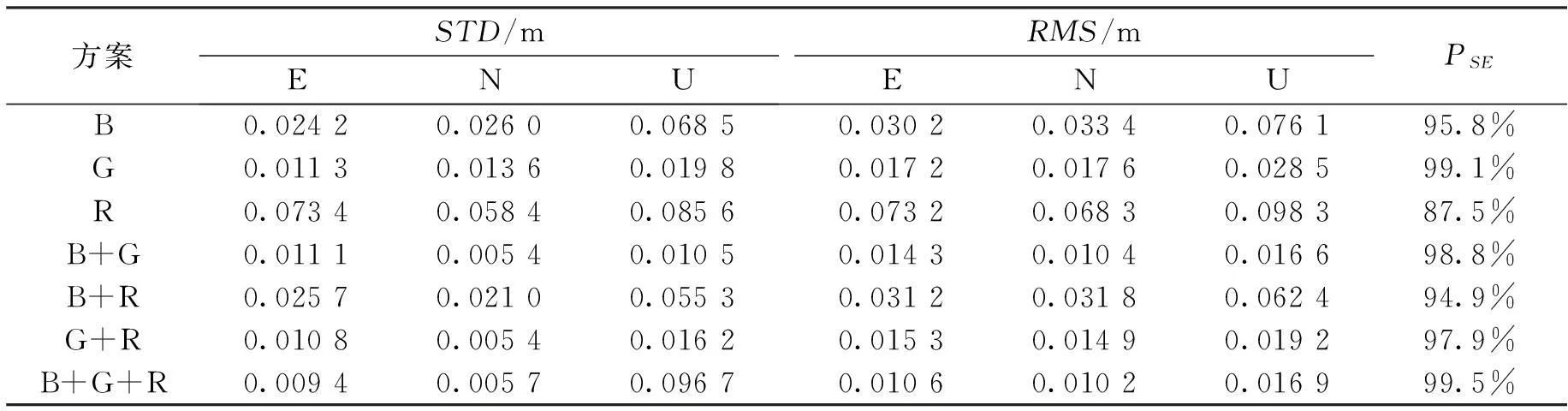
表2 截止高度角30°时七种方案在E、N、U方向的STD、RMS值及模糊度固定率(PSE)
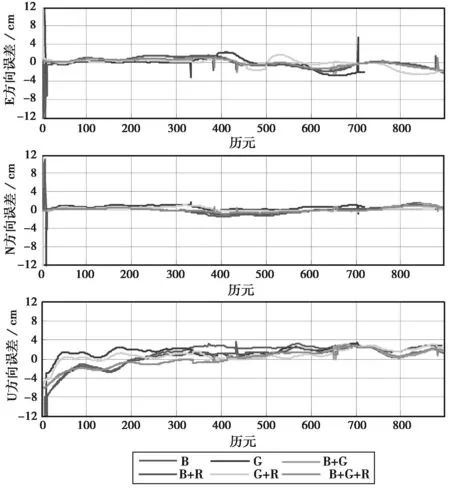
图 6 七种方案在E、N、U方向的定位误差 (截止高度角45°)
通过图6可以看出,在截止高度角为45°,发现方案III(GLONASS),已经不可以实现高精度相对定位,方案II(GPS)只有68.2%的历元可以实现高精度相对定位,而其他方案均可以实现(100%)。六种方案的定位精度均在厘米级别。从表3可以看出,三系统组合单频相对定位的模糊度固定率明显优于双系统组合单频及单系统单频相对定位。
从图4、图5、图6可以看出,随着截止高度角增加,剔除一些高度角较低的卫星,单频相对定位的定位精度稍微有点提高。同时可以看出不管截止高度角高或低,三系统组合单频相对定位的模糊度固定率优于双系统组合单频及单系统单频。

表3 截止高度角45°时七种方案在E、N、U方向的STD、RMS值及模糊度固定率(PSE)
3结束语
本文研究了BDS/GPS/GLONASS组合单频相对定位的的函数模型。通过实测短基线数据比较分析了BDS/GPS/GLONASS组合单频高精度相对定位的定位性能,得出以下结论:
1) 随着截止高度角增加,剔除一些高度角较低的卫星,单频高精度相对定位的定位精度稍微有点提高。
2) 不论截止高度角的高或低,BDS/GPS/GLONASS三系统组合可以有效地增加可用卫星的数量,增强观测卫星的几何图形强度,同时增强单历元模糊度固定效果。
3) 相比于单系统及双系统组合,BDS/GPS/GLONASS三系统组合能够有效地提高相对定位的定位精度、稳定性和可用性。
4) BDS/GPS/GLONASS三系统组合单频高精度相对定位非常适合城市峡谷等复杂环境中。
参考文献
[1] 宁津生,姚宜斌,张小红.全球导航卫星系统发展综述[J].导航定位学报,2013,1(1):3-8.
[2] MAN X, SUN F. Analysis of positioning performance on combined BDS/GPS/GLONASS[C].//China Satellite Navigation Conference,2015.
[3] ODOLINSKI R,TEUNISSEN P J G,ODIJK D. First combined COMPASS/BeiDou-2 and GPS positioning results in Australia part II:Single-receiver and relative code-only positioning[J].Journal of Spatial Science,2014,59(1):25-33.
[4] ODOLINSKI R,TEUNISSEN P J G. An analysis of combined COMPASS/BeiDou-2 and GPS single-and multiple-frequency RTK positioning[C].//Proceedings of The Institute of Navigation Pacific PNT Honolulu, Hawaii,2013.
[5] 汪亮,李子申.BDS/GPS/GLONASS组合的双频单历元相对定位性能对比分析[J].科学通报,2015(9):857-868.
[6] 周巍.北斗卫星导航系统精密定位理论方法研究与实现[D].郑州:解放军信息工程大学,2013.
[7] TEUNISSEN,P J G. The least squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation[J].Journal of Geodesy,1995,70(1):65-82.
[8] 李鹤峰,党亚民,秘金钟,等.BDS与GPS、GLONASS多模融合导航定位时空统一[J].大地测量与地球动力学.2013,33(4):73-78.
[9] 魏子卿.2000中国大地坐标系及其与WGS84的比较[J].大地测量与地球动力学,2008,28(5):1-5.
[10]段举举,沈云中.GPS/GLONASS组合静态相位相对定位算法[J].测绘学报,2012,41(6):825-917.
张康(1990-),男,硕士,主要从事GNSS融合相对定位与GNSS载体姿态测量相关方面的研究。
郝金明(1962-),男,教授,博导,主要从事卫星导航与精密定位方向的研究。
蒲湘文(1986-),男,工程师,主要从事测绘信息化相关研究。
张宇(1992-),男,硕士,主要从事精密定位及气象学方向的研究。
杨团生(1990-),男,助理工程师,主要从事北斗导航应用相关研究。
Analysis of Positioning Performance on Combined BDS/GPS/GLONASS Single-Frequency Single-Epoch High-Precision Relative Positioning
ZHNAG Kang1,2,3,HAO Jinming1,2,3,PU Xiangwen4,ZHNAG Yu1,2,3,YANG Tuansheng5
(1.PLAInformationEngineeringUniversity,Zhengzhou450001,China;2.KeyLabofNavigationProject,Zhengzhou450001,China;3.BeidouNavigationApplicationTechnologyCollaborativeInnovationCenter,Zhengzhou450001,China;4.MappingTeamofChashanTownDongguanCity,Dongguan523380,China;5.SurveyingandMappingInformationCenterofGuangzhouMilitaryRegion,Guangzhou510000,China)
Abstract:Compared with BDS and GPS, the double-difference ambiguity of relative positioning lost its integer property. The paper gives relative positioning models of combined BDS/GPS/GLONASS with single-frequency. Preliminary analyze the positioning performance of combined BDS/GPS/GLONASS single-frequency relative positioning with carrier phase observation, and with ambiguity using LAMBDA method, single epoch searching strategy. By short baseline measurement data analysis showed that:compared with single-frequency relative positioning of single-system and dual-system, single-frequency relative positioning of three-systems can improve the positioning accuracy and fixed rate of ambiguity, and more suitable for urban-canyons environments.
Keywords:Combined BDS/GPS/GLONASS; single-frequency;relative positioning; LAMBDA; fixed rate of ambiguity
作者简介
中图分类号:P228.4
文献标志码:A
文章编号:1008-9268(2016)01-0043-06
收稿日期:2015-06-10
doi:10.13442/j.gnss.1008-9268.2016.01.008
联系人: 张康 E-mail: 289147188@qq.com