一种小型舰船的航向姿态测量系统
2016-04-20 02:50中国船舶重工集团公司第七一研究所詹金晶
电子世界 2016年6期
中国船舶重工集团公司第七一〇研究所 詹金晶
一种小型舰船的航向姿态测量系统
中国船舶重工集团公司第七一〇研究所 詹金晶
【摘要】设计了一种用于小型舰船的航向姿态测量系统。该系统对陀螺罗经的航向数据和姿态传感器的横滚、俯仰数据进行实时处理,能为小型舰船提供高精度的航姿信息,且系统体积小,易于安装。经过调试和试验,该测量系统已得到成功应用。
【关键词】航向;姿态;测量
0 引言
航向和姿态信息(包括横滚角度、横滚角速率、俯仰角度和俯仰角速率)在舰船航行过程中实时变化,其对操船控制和武器装备使用的精确性有重要影响。因此,需要对舰船的航向和姿态进行实时测量并发送到舰船控制系统,以进行控制修正和参数补偿,保障舰船的可靠航行和装备的使用效能。
对大中型舰船,航向和姿态数据一般都是通过平台罗经给出,但平台罗经的体积和重量大、费用昂贵,不宜在小型舰艇上使用。小型舰船上一般安装陀螺罗经,利用陀螺仪的定轴性和进动性,为舰船提供真北基准,实时测量舰船的航向值,由姿态传感器完成舰船姿态信息的实时测量。姿态传感器由三轴陀螺仪和三只加速度计组成,其体积小,精度高,满足小型舰船的性能要求。
为了减少数据接口,提高各控制设备航姿数据的一致性,本文将陀螺罗经测量的航向值和姿态传感器测量的姿态数据融合为一路数据,同时为小型舰船上各控制设备提供航姿信息。
1 系统组成
该测量小型舰船航姿信息的系统,包括陀螺罗经、姿态传感器和数据处理模块。
陀螺罗经完成舰船航向的实时测量,具有自动找北的功能,在理想状态,它自动稳定在子午面内。因此,它可以测量舰船相对北向的方位或指示舰船运动的航向。陀螺罗经采用陀螺仪为敏感器件,根据角速度解算出航向信息,并转换为RS422A接口输出。陀螺罗经包括主罗经和航向发送箱。
姿态传感器完成舰船姿态信息的实时测量,包括舰船横滚角度、横滚角速率、俯仰角度和俯仰角速率等。姿态传感器由三轴硅微陀螺仪和三只石英振梁加速度计组成,其体积小,精度高,适用于小型舰船。
数据处理模块完成航向数据和姿态数据的融合,主要包括姿态传感器初始化、航向数据解析、姿态数据解析、航姿数据融合、更新率设置、数据发送等,由软硬件配合完成。本文主要介绍数据处理模块的实现。
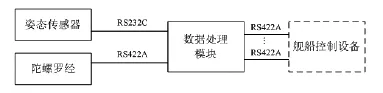
图1 系统组成
2 数据处理模块
数据处理模块通过RS232C接口发送配置信息到姿态传感器,完成对姿态传感器工作模式、数据更新率等参数的初始化,接收到姿态传感器初始化成功的消息后开始接收姿态数据,解析读取传感器状态、横滚角度、横滚角速率、俯仰角度和俯仰角速率等。同时,该模块通过RS422A接口接收来自陀螺罗经的航向数据,解析提取设备工作状态、航向值、航向变化率等信息。解析的航向和姿态数据按照NMEA0183协议的格式进行组合,同时根据更新率配置要求,该模块定时将航姿数据通过RS422A接口发送出去。
2.1 硬件组成
数据处理模块硬件由接口电路、控制处理电路和电压转换电路组成。控制处理电路由C51单片机及其附属电路组成,主要功能由灌装在单片机内的软件实现。根据人工跳线或开关状态对姿态传感器和数据处理模块参数进行配置,接收并解析航向数据和姿态数据,进行航姿数据融合后将该数据发送到接口电路。
接口电路使用了ST16C554芯片作为C51单片机的串口扩展芯片,实现4路串口通信。这4路串口通信可独立控制发送和接收,具有可编程的串行数据发送格式。ST16C554与C51单片机之间的接口包括:D0-D7双向8位数据线,A0-A2片内寄存器选择信号,A8-A11片选信号,INTA-INTD串行口中断输出信号及WR、RD读写信号。
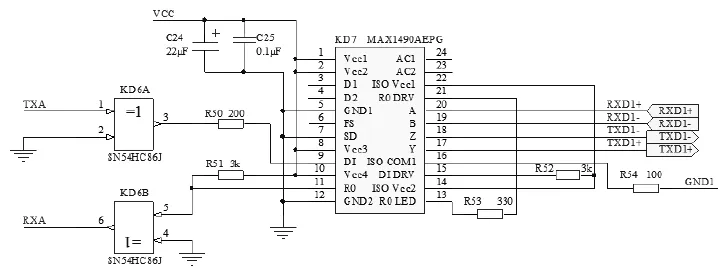
图2 RS422A电路
ST16C554芯片扩展的4路串口与MAX1490芯片连接,实现TTL电平与RS422A电平之间的接口转换,如图2所示。C51单片机自身的UART串行接口与MAX232芯片连接,实现TTL电平与RS232C电平之间的接口转换。1路RS422A接口完成控制处理电路与陀螺罗经的数据传输,3路RS422A接口完成航姿数据的输出,1路RS232C接口完成控制处理电路与姿态传感器的数据传输。
电压转换电路完成输入电压+24V到模块上各芯片所需电压+12V、+5V和+3.3V的转换,由开关电源芯片和电容、电阻、电感等元器件组成。在电压转换电路的PCB设计中,电源芯片与电容、电感的连接必须尽可能近,以减小输出电压的波动。
2.2 软件实现
2.2.1 软件功能
数据处理模块软件实现姿态传感器配置功能、姿态数据采集功能、航向数据采集功能、航向姿态数据融合功能以及串口通信功能。
数据处理模块软件通过读取硬件跳线设置,由RS232C串口配置姿态传感器的工作参数。该系统中不采用姿态传感器的航向值,所以配置报文中序号3-序号7的内容都填0。
数据处理模块软件在完成姿态传感器配置后,通过RS232C串口采集姿态传感器的姿态数据,通过RS422A串口采集罗经的航向数据。数据处理模块软件完成姿态数据或航向数据采集后,进行航向姿态数据处理,包括姿态数据的解析、计算和格式转换。航向姿态数据处理完成后,将融合后的航姿数据通过串口输出。
2.2.2 软件处理流程
控制处理电路内软件处理流程如图3所示。
系统上电后,软件读入姿态传感器和系统配置参数,通过RS232C接口对姿态传感器的工作方式和更新率参数进行配置,对系统输出航姿数据的更新率进行配置。
姿态传感器发送的第一帧数据为返回的配置文件,系统不作处理,在第一帧数据之后,系统通过两个串口分别接收姿态数据和航向数据。首先根据是否连续接收到两个起始标志“$” 来判断姿态数据是否收齐,若已经收齐,则计算接收数据的校验码,并与接收数据中传输的校验码进行比较,若一致,则接收数据无误,开始解析提取姿态数据中的传感器状态、横滚角度、横滚角速率、俯仰角度和俯仰角速率等信息。
若姿态数据未收齐,或姿态数据有误,或姿态数据已正确解析,则根据是否连续接收到两个起始标志“$”判断航向数据是否收齐。若航向数据未收齐,或航向数据有误,则继续接收航向数据,并进行判断。若已收齐,则计算接收数据的校验和,并与接收数据中的校验码对比,若一致,则对航向数据进行解析提取出工作状态和航向值。
若航向数据已正确解析,则将横滚角度、横滚角速率、俯仰角度、俯仰角速率及航向数据进行融合,并计算校验码,组成一帧完整的航姿数据。根据系统更新率配置参数,设置定时器时长,在定时达到时将航姿数据通过串口发送出去。在整个处理流程中,虽然先对姿态数据进行采集解析,但其状态不影响航向数据的处理。但是,若未收到有效的航向数据,则系统不输出航姿数据。在航姿数据中,需要在相应的有效状态位对姿态和航向数据的实际状态进行标识。

图3 数据处理流程
2.3 系统调试
为了测试系统在各种不同状态下的输出,由计算机串口模拟输出陀螺罗经的航向数据,分别测试罗经未稳定状态、稳定状态、航向数据不完整、航向数据校验码错误等不同情况下航姿数据的输出状况。姿态传感器直接接入到系统,改变姿态传感器的横滚角度和俯仰角度,观察航姿数据是否正确。
经过调试,数据处理模块能正确解析和融合姿态数据及航向数据。经过与陀螺罗经、姿态传感器的联合调试,系统工作正常。
3 结束语
本文实现了由陀螺罗经、姿态传感器和数据处理模块组成的小型舰船航姿测量系统,该系统体积小、精度高,经过调试和试验,能满足小型舰船对航姿数据测量的要求,具有实际应用意义。
参考文献
[1]孙庆祥,金炳哲,孟巍,臧义华.SGB1000型陀螺罗经接口设计与实现[J].应用科技,2007, 34(4):36-38.
[2]李众,高键,李彦.基于单片机技术的数字电罗经系统[J].华东船舶工业学院学报,2000, 14[5]:27-31.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
学生天地(2020年3期)2020-08-25
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
民用飞机设计与研究(2019年4期)2019-05-21
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
中学生数理化·八年级物理人教版(2018年3期)2018-05-31
电子制作(2017年24期)2017-02-02