
基于Modbus通信协议的PLC与CAN总线通讯
2016-04-22 02:53曹肖伟
徐州工程学院学报(自然科学版) 2016年1期
孙 进,曹肖伟,丁 静,刘 俊
(扬州大学 机械工程学院,江苏 扬州 225127)
基于Modbus通信协议的PLC与CAN总线通讯
孙进,曹肖伟,丁静,刘俊
(扬州大学 机械工程学院,江苏 扬州225127)
摘要:为了提高上位机对下位机实时监测和控制的效率,通过基于Modbus通信协议的PLC与CAN总线实现通讯.根据监测界面对信号采集模块采集到信息的更新速率和上位机对输出端口模块的控制效果,现场总线CAN bus和PLC通信的及时稳定和抗干扰能力能够得到充分体现,系统运行状况良好,验证了PLC和CAN总线通讯的及时、稳定和高效.
关键词:PLC;CAN总线;通讯
PLC(programmable logic controller)即可编程逻辑控制器,主要是为在工业复杂环境条件下应用而设计,它采用的存储器是可编程序的,并且在内部存储执行逻辑运算、定时、计数、顺序控制和算数运算等操作指令,并通过模拟式、数字式的输入输出,控制各种类型的机械或生产过程[1].CAN (controller area network) 是控制器局域网络,CAN总线属于总线式串行通信网络,并且是一种技术特别先进同时具有完善的功能、较高的可靠性、较低的成本的网络通信控制方式[2].Modbus 协议是一种应用比较广泛的通用语言,适用于电子控制器上的通讯,已经成为通用的工业标准.通过此协议,控制器相互之间可以通过网络实现与其它设备之间的通信[3].包括 PLC、DCS、智能仪表等在内的许多工业设备都把 Modbus协议作为通讯标准,在 Modbus 网络或其它网络上实现数据传输[4].本文以目前国内应用最广泛的CAN协议现场总线系统为例,介绍了以PLC作为底层控制单元的温湿度和压力采集系统的具体实现方法.
1系统的整体结构
信号采集设备现场总线系统是由PC机作为主控单元,通过CAN总线实现与PLC通信,进而控制信号采集装置的系统,其主要构成和运行方式如图1所示.
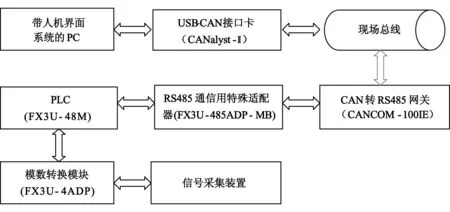
图1 系统的构成和运行方式
系统的整体工作流程如下:将带人机界面系统的PC机通过USB-CAN接口卡连接到现场总线上,采用CAN转RS485网关进行协议转换,同时单台PLC再通过RS485通信用特殊适配器与网关连接,使得每个PLC具备CAN总线的通讯接口,这样单台PLC实现与CAN总线的通讯.同时,PLC再与模数转换模块相连,使得信号采集装置与PLC实现通讯.这种方式可以充分发挥工控PC机的作用,通讯效率较高,是PLC网络建设的主流方向[5].
2PLC和人机界面通讯的实现
信息交换在系统控制过程中是特别重要的一部分,在本系统中人机界面需要控制PLC的操作,同时PLC也需要将收集到的信息传递到人机界面上.下面介绍PLC和人机界面在系统中的通信方法和实现.
2.1硬件方案
系统中所采用的PLC为三菱公司生产的FX系列,同时与其配套的通信适配器为FX3U-485ADP-MB的RS485通信特殊用适配器,CAN-RS485网关型号为CANCOM-100IE,需要与电脑PC相连接的CAN-USB通讯接口卡则采用CANalyst-Ⅱ[6].
2.2软件方案
ZOPC_Server 是一个OPC 服务器软件,支持操作所有的CAN 系列接口卡、iCAN 系列功能模块、DeviceNet 系列板卡及模块和CANopen系列板卡及模块.只要在PC 机上插上这些板卡中的任何一种或几种,运行本服务器软件,再进行一些相关配置以后,就可以使用任何一种支持OPC 协议的客户端软件(如组态软件:力控ForceControl、组态王KingView等)连接到此服务器,通过此服务器与CAN、iCAN、CANopen等多种网络类型进行数据传输.
采用力控监控组态软件进行PC机上人机界面的搭建.力控软件是对现场生产数据进行采集与过程控制的专用软件,其最大特点是不用编程方式来进行系统集成,而是以灵活多样的“组态方式”进行系统集成,具有良好的用户开发界面和简捷的工程实现方法,能同时和国内外各种工业控制厂家的设备进行网络通讯.它还可以与高可靠的工控计算机和网络系统结合,达到集中管理和监控的目的,同时还可方便地向控制层和管理层提供软、硬件的全部接口,实现与“第三方”的软、硬件系统进行集成.
三菱PLC在通信适配器的作用下采用Modbus通信协议.Modbus协议是一种主从方式的通信协议,由主机发送命令请求,从机根据接收到的命令发送返回信息[7].
2.3三菱PLC与电脑上位机Modbus通讯
2.3.1上位机串口参数设置
参数设置如图2所示,对应PLC参数设置已由软件写入PLC程序中.

图2 上位机串口参数设置
2.3.2湿度参数
湿度参数地址为D210,报文传送格式如图3所示,接收报文从第4位开始至第7位为数据位,即“B3 33 42 11”,该数据对应PLC地址D210中数据,数据位带小数浮点数.最后两位为CRC校验码.

图3 湿度参数设置
2.3.3温度参数
温度参数地址为D230,报文传送格式如图4所示,接收报文从第4位开始至第7位为数据位,即“E8 F6 42 02”,该数据对应PLC地址D230中数据,数据位带小数浮点数.最后两位为CRC校验码.

图4 温度参数设置
2.3.4重量参数
重量参数地址为D250,报文传送格式如图5所示,接收报文从第4位开始至第7位为数据位,即“99 9A 3F 81”,该数据对应PLC地址D250中数据,数据位带小数浮点数.最后两位为CRC校验码.

图5 重量参数设置
2.3.5PLC输出端口控制
通过远程控制Y0输出.图6所示为Y0输出端输出.图7为Y0输出端输出关闭.需要注意的是,在串口报文发送时,请将“十六进制”选择框勾选,否则将无法正常通讯.

图6 PLC输出端口参数设置

图7 Y0输出端输出关闭参数设置
3实际验证
通过对软硬件的设置和搭建,构成实验平台如图8所示.通过单PLC和CAN总线的通讯进行信号的采集,可以达到预想的效果,完成对温湿度和压力的采集.
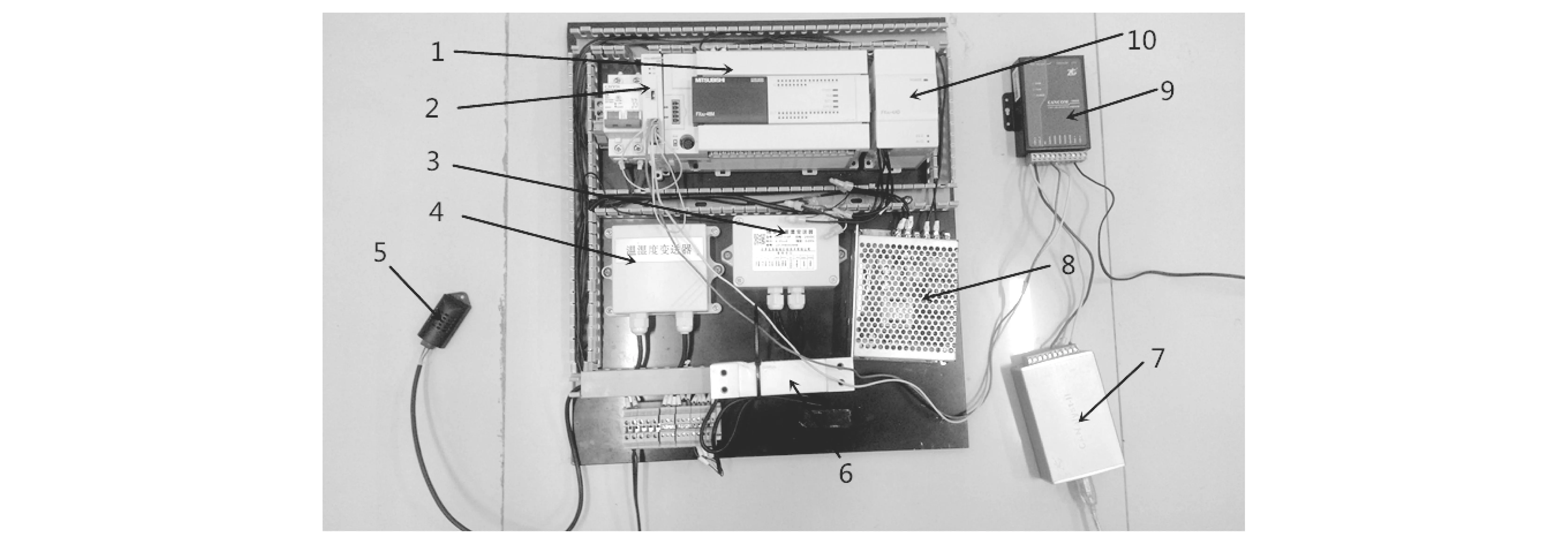
1—FX3U-48M型PLC;2—RS485通信用特殊适配器;3—重量变送器;4—温湿度变送器;5—温湿度传感器;6—重量感应装置;7—CAN323MB转RS485网关;8—电源;9—RS485通信用特殊适配器;10—模数转换模块图8 实验平台
图9为进行温湿度和压力显示及控制的人机界面监测图.随着环境中温湿度的变化,PC监测页面会迅速显示出当前温湿度的精确值,并通过曲线显示出每个时刻的变化趋势.当重力传感器接受到的压力发生变化时也会及时更新当前压力值.其中的Y0、Y1等控制按钮能够对PLC输出端外接的电机实现实时控制.

图9 温湿度和压力监测界面
4结语
通过基于Modbus通信协议的PLC与CAN总线实现通讯.以三菱FX系列PLC为例,介绍了PLC和CAN总线系统的人机界面通信方法和实现过程.现场总线CAN bus和PLC通信的及时稳定和抗干扰能力能够得到充分体现,系统运行状况良好.同时也证明了基于CAN 总线与PLC互联的实时监控系统是可行的,并可应用于工况类似的其他监测场合,符合监控技术的发展趋势.
参考文献:
[1] 李界家,李晓峰,片锦香.基于改进PSO和模糊RBF神经网络的退火炉温控制[J].南京理工大学学报(自然科学版),2014,38(3):337-341.
[2] 薛雷.CAN总线的动态优先权分配机制与非实时数据的传输[J].计算机工程与应用,1999(12):33-35.
[3] XU J N,LIU W D,JI Y P,et al.Remote measuring and controlling system based on Ethernet and CANbus[J].Computer Measurement & Control,2007,15(3):302-304.
[4] JHANG K S,YI K,HWANG S Y.A two-level on-chip bus system based on multiplexers[C].Beijing:9th Asia-Pacific Conference,Advances in Computer Systems Archtecture,2004:363-372.
[5] 李洪锋.利用CAN-bus 实现多台 PLC 之间的远程配置与实时通信[J].电子产品世界,2007(6):99-103.
[6] 韩晓新.三菱FX系列PLC基础及应用[M].北京:机械工业出版社,2010.
[7] 戚志东,彭富明,刘猛,等.基于模糊PID的质子交换膜燃料电池输出电压控制[J].南京理工大学学报(自然科学版),2012,36(3):432-436.
(编辑武峰)
PLC and CAN Bus Communication Based on the Modbus Communication Protocol
SUN Jin,CAO Xiaowei,DING Jing,LIU Jun
(College of Mechanical Engineering,Yangzhou University,Yangzhou 225127,China)
Abstract:In order to improve the real-time monitoring and control of the upper computer,the communication is realized by PLC and CAN bus based on Modbus communication protocol.According to the monitoring interface of signal acquisition module, the update rate of the information and the control effect of the upper computer to the output port module are realized.The communication protocol of Modbus and PLC is implemented in time, which is based on CAN communication protocol.According to the experimental results,the PLC and CAN bus communication are verified in time, stability and efficiency.
Key words:PLC;CAN bus;communication
中图分类号:TP271
文献标志码:A
文章编号:1674-358X(2016)01-0077-04
作者简介:孙进(1973-),男,讲师,博士,硕士生导师,主要从事机电一体化研究.
基金项目:国家自然科学基金项目(51475409);江苏省自然科学基金项目(BK20141277);中国博士后科学基金(2013M541736);江苏省博士后基金项目(1302179C);扬州市-扬州大学科技合作项目(2012038-12);扬州大学教改课题(YZUJX2014-50C)
收稿日期:2015-11-28
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
现代商贸工业(2016年21期)2016-12-26
现代电子技术(2016年22期)2016-12-26
电子技术与软件工程(2016年22期)2016-12-26
科技视界(2016年18期)2016-11-03
中国科技信息(2016年19期)2016-10-25
